
Pruebe ejemplos de comandos de cumplimiento
Precaución
Antes de probar la muestra, asegúrese de leer y seguir Precauciones. Para obtener más información, consulte la PARTE 1. Manual de seguridad.
Nota
Si hay un par externo por encima del umbral al habilitar o deshabilitar el control de cumplimiento, el robot detiene el programa debido al error JTS (Joint Torque Sensor).
El cambio de rigidez se puede ejecutar independientemente del tamaño de torque externo.
Durante el control de cumplimiento, los movimientos conjuntos, como el comando MoveJ, no se pueden ejecutar.
Umbral de error JTS (Nm) | ||||||
Modelo | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
E0509 | 15 | 15 | 15 | 15 | 15 | 15 |
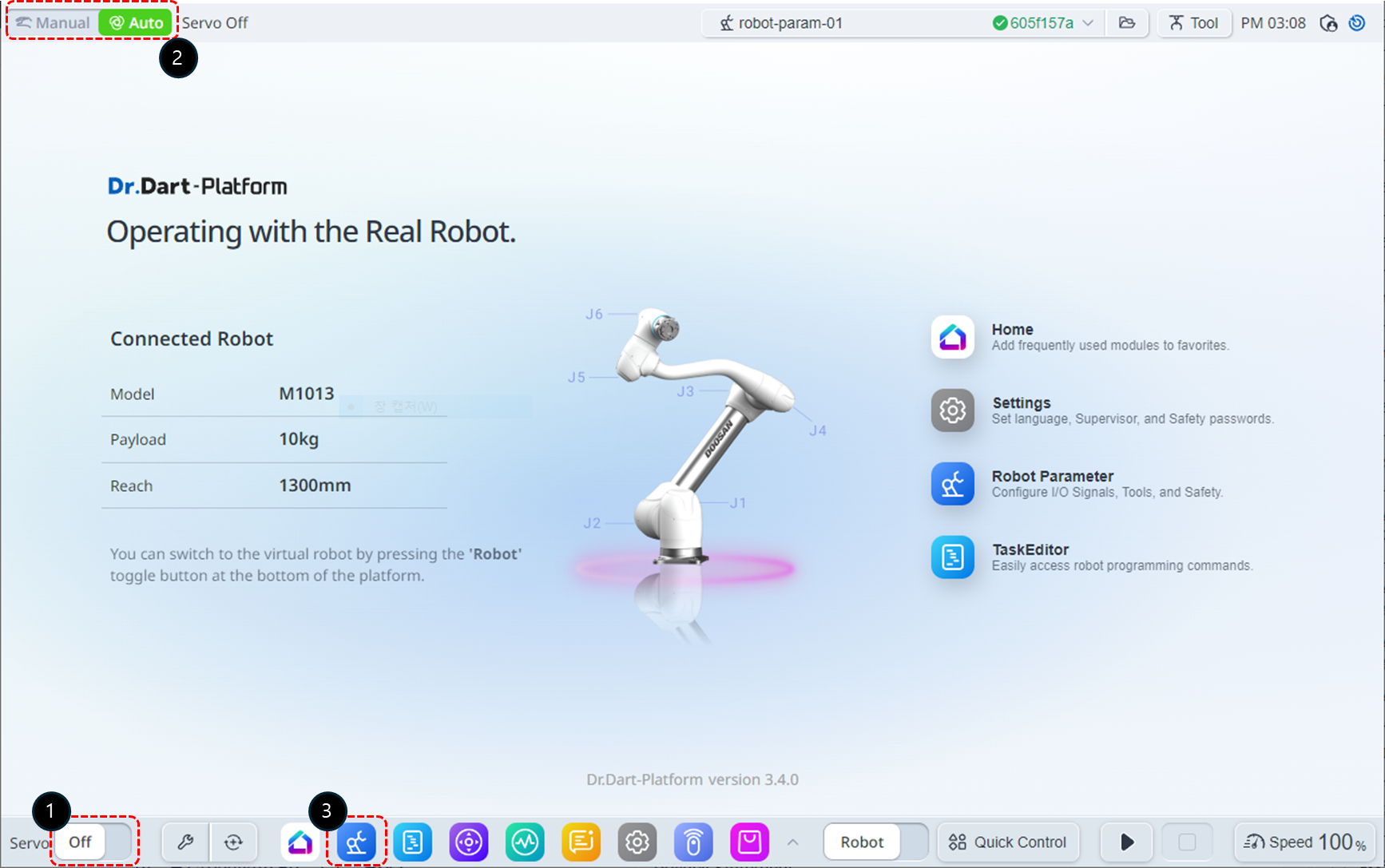
Cambiar el estado servo a ON.
Cambie el modo de operación a Manual.
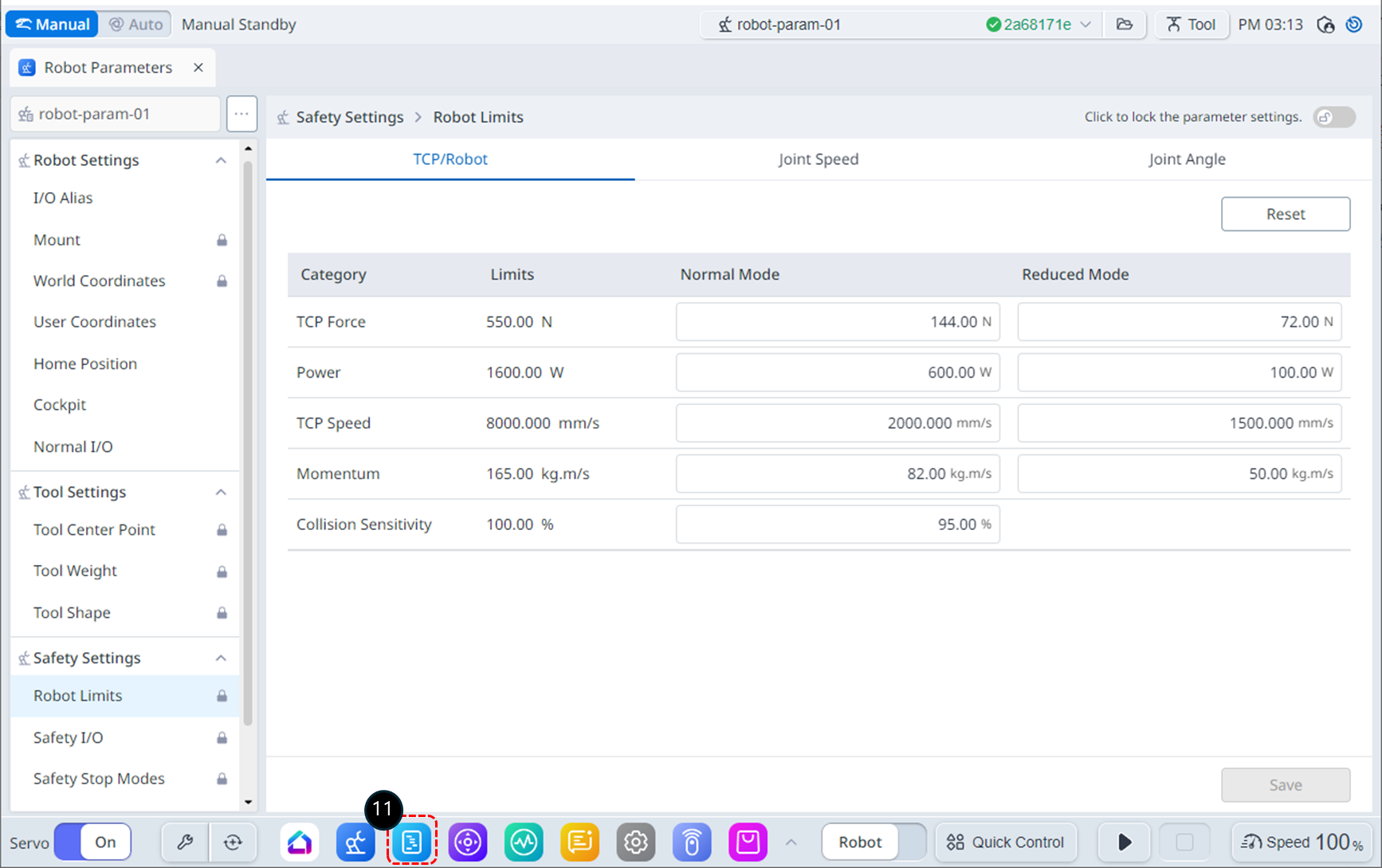
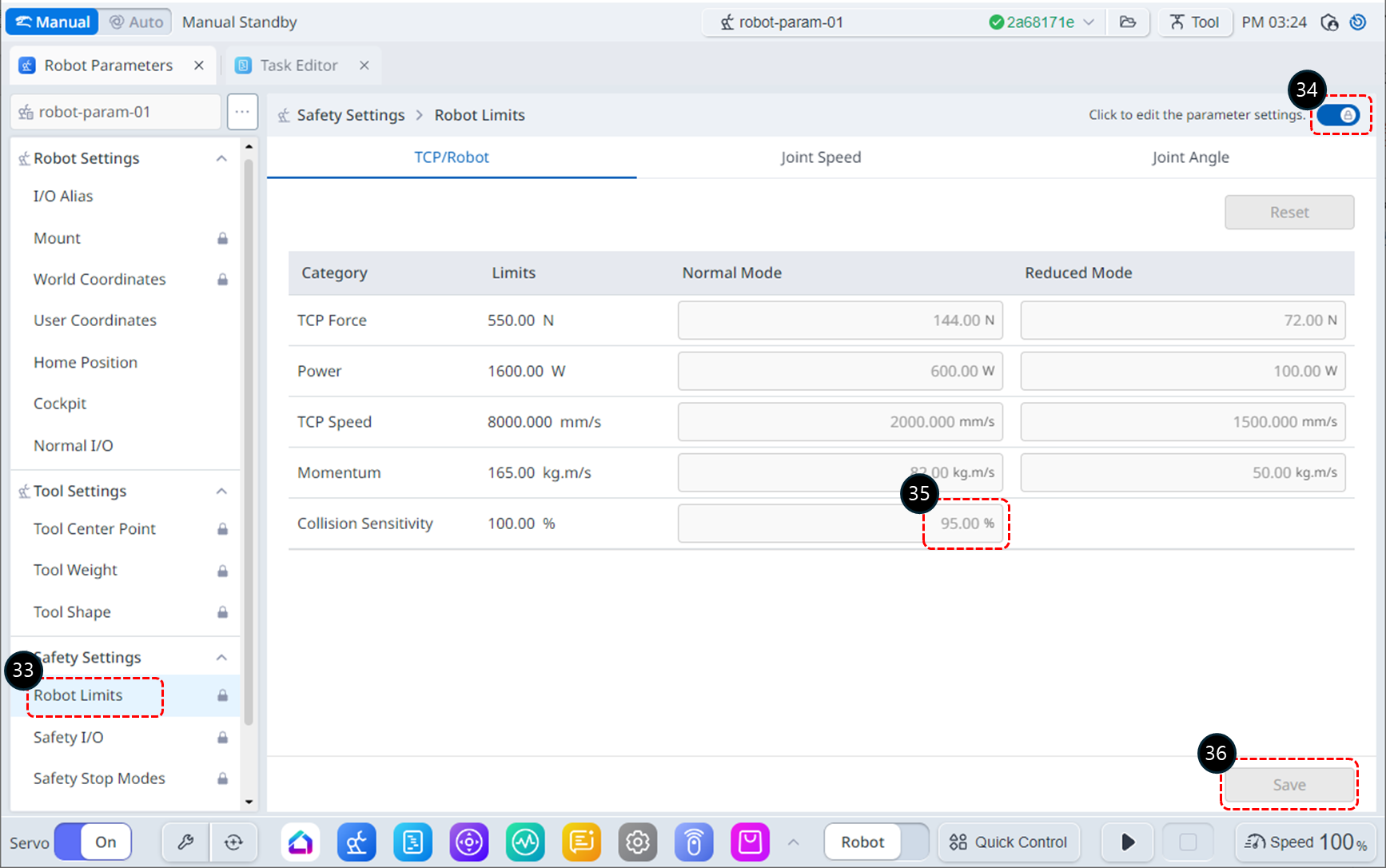
Seleccione el módulo Parámetros del robot en el menú inferior. En este ejemplo, la sensibilidad de colisión se establece en 95% para explicar la razón por la que se reduce la sensibilidad de colisión cuando se utiliza el control de cumplimiento.
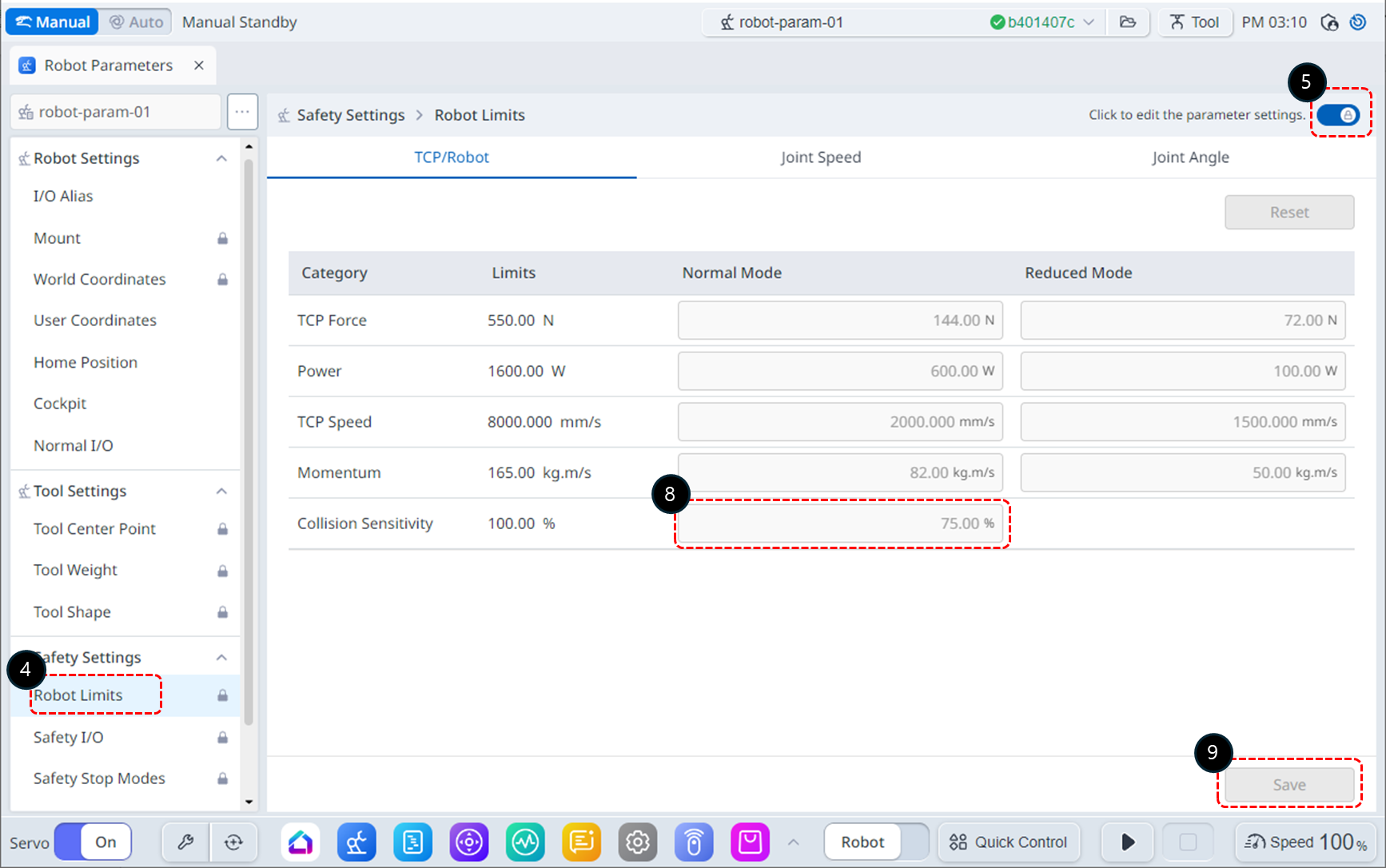
Seleccione Límites de robots en Configuración de seguridad.
Habilite el estado de edición de parámetros.
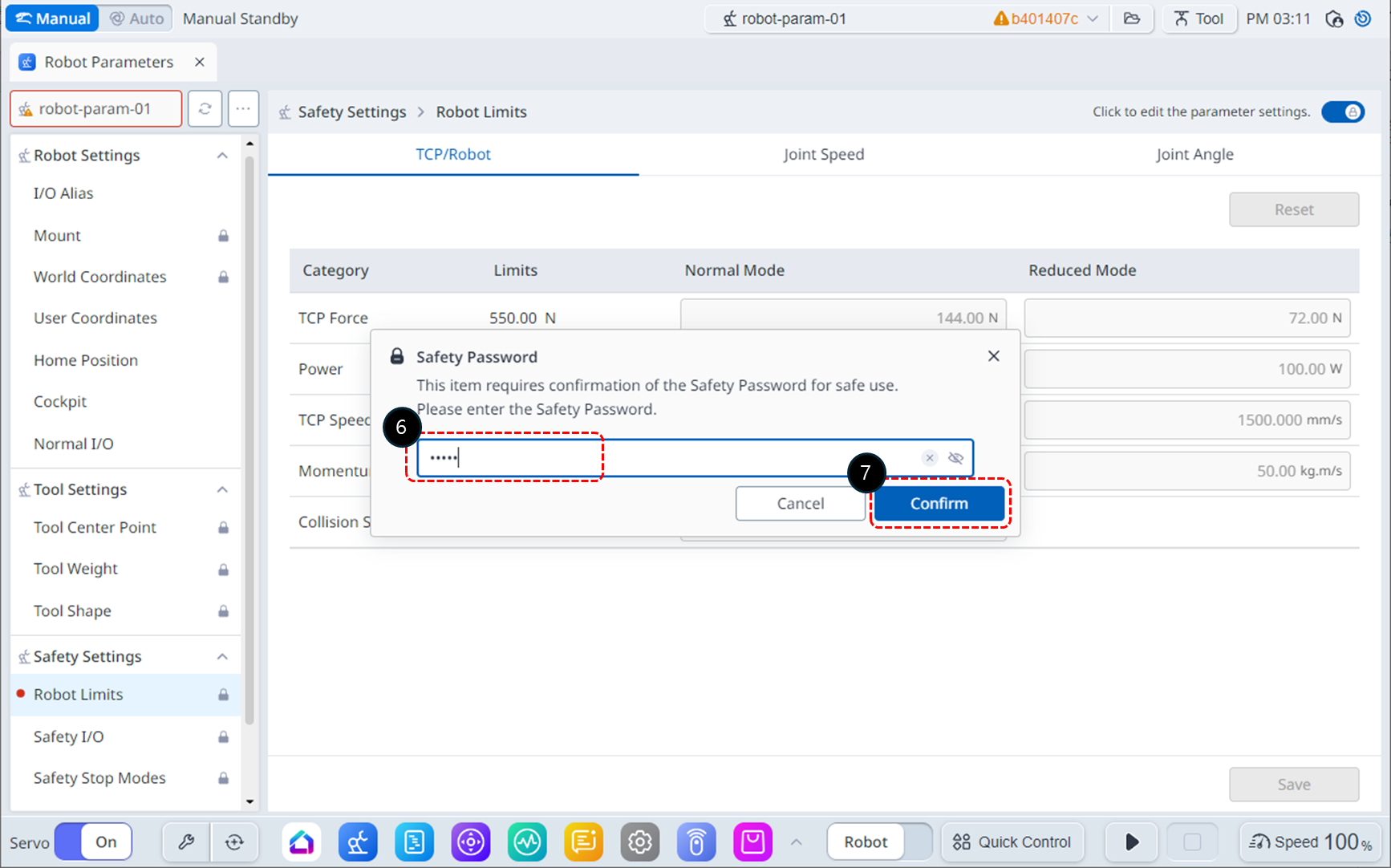
Si aparece una ventana de entrada de contraseña, ingrese la contraseña de seguridad (contraseña de seguridad predeterminada: Admin).
Haga clic en el botón Confirmar.
Modificar la sensibilidad de colisión al 95%.
Haga clic en el botón Guardar para guardar la configuración.
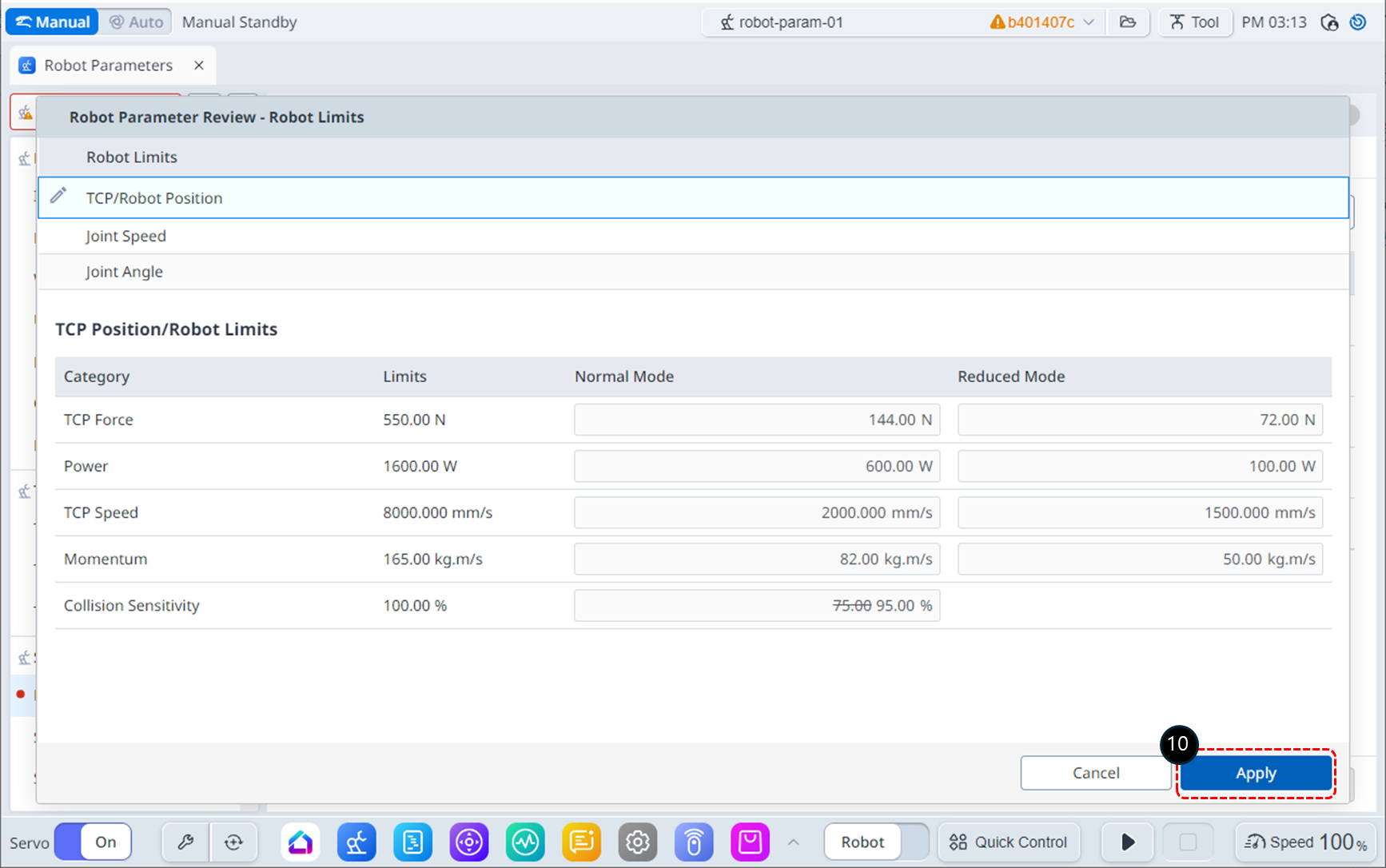
Después de revisar los cambios, haga clic en el botón Aplicar.
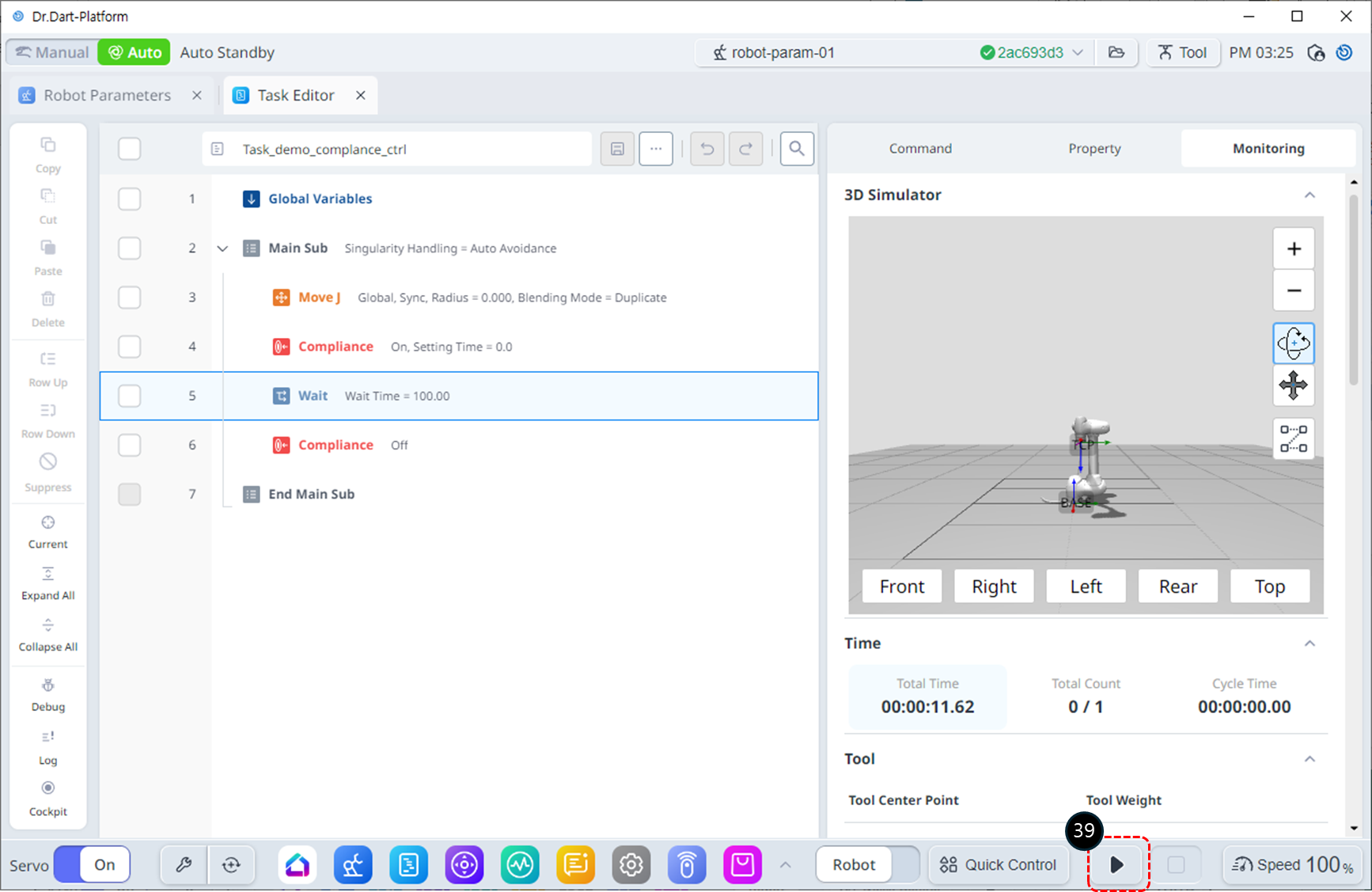
Seleccione el módulo Editor de tareas en el menú inferior.
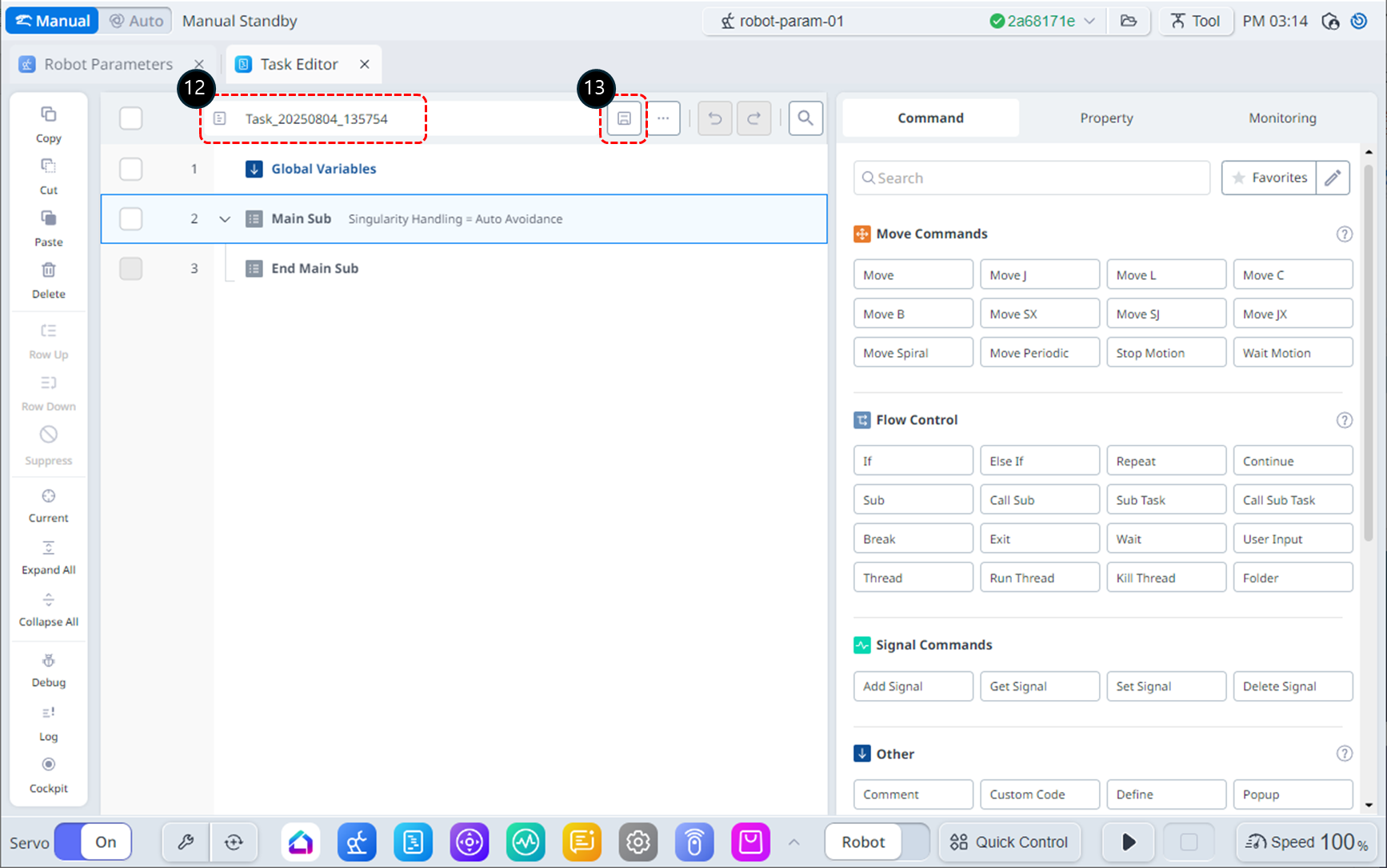
Cambie el nombre de la tarea a Task_demo_compliance_ctrl.
Guarde el nombre de tarea actualizado.
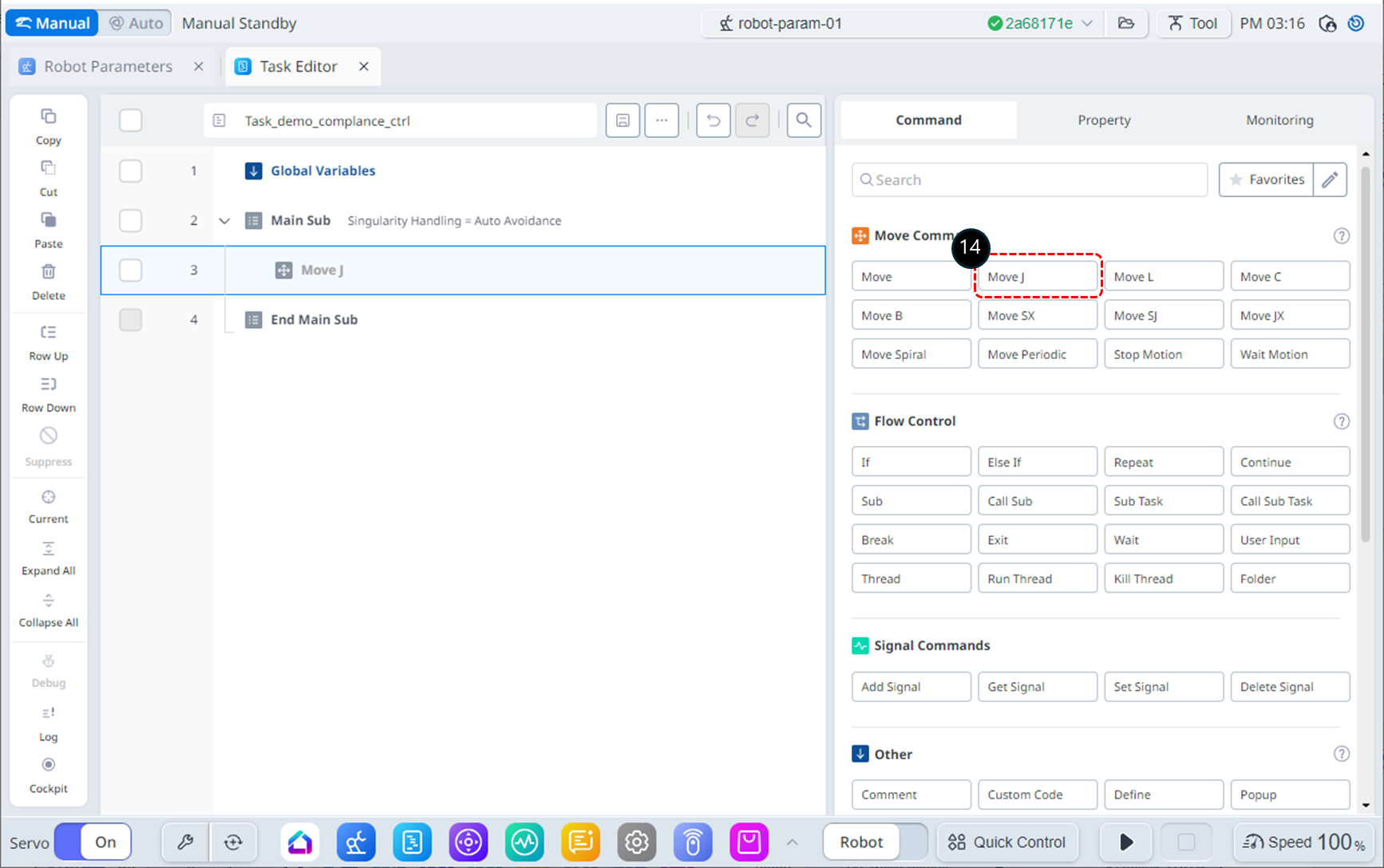
Agrega el comando MoveJ. Este comando se utilizará para mover el robot a la posición inicial para el control de cumplimiento.
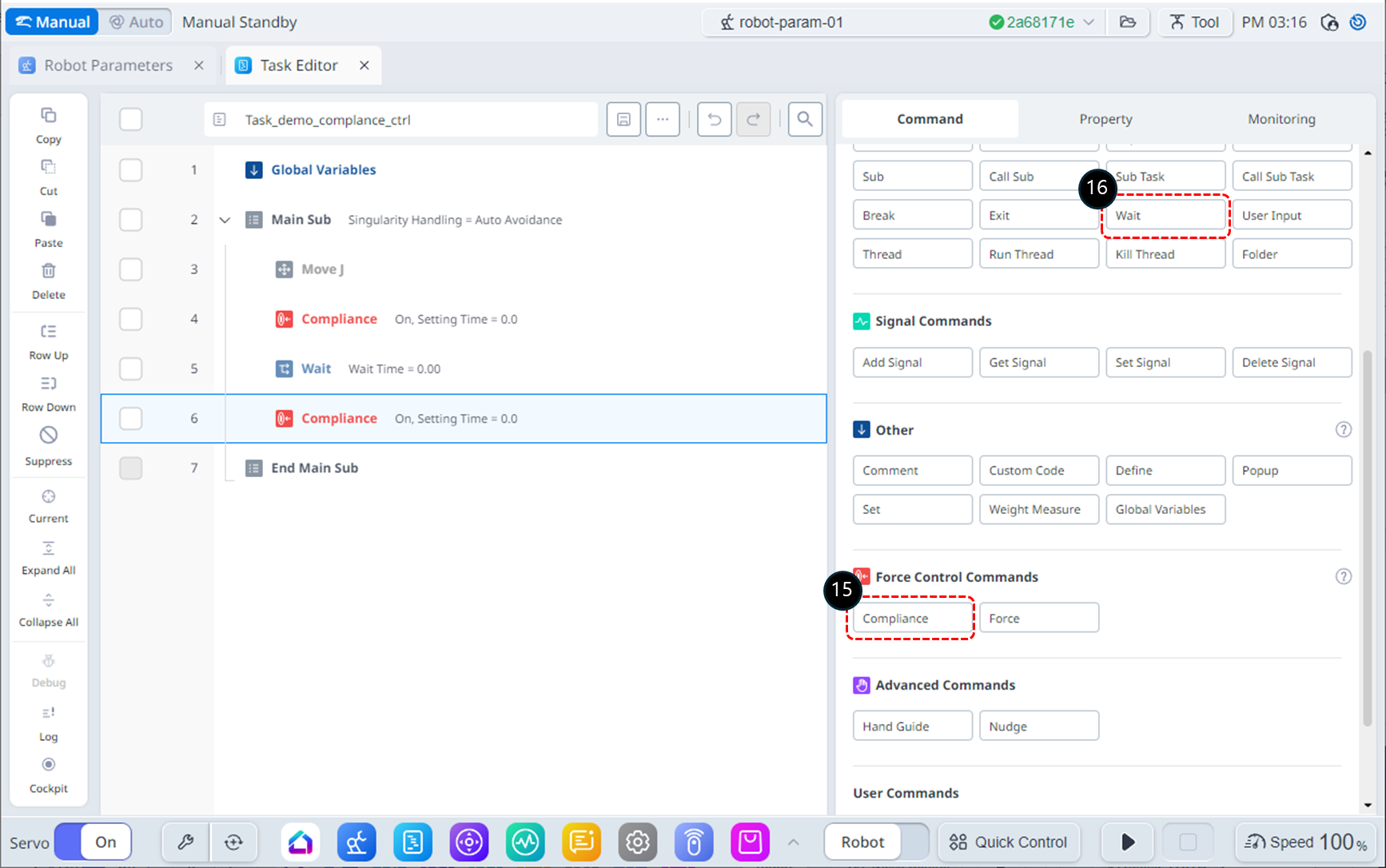
Agregue dos comandos de cumplimiento. Estos comandos se utilizarán para activar y desactivar el control de cumplimiento.
Inserte un comando de espera entre los comandos de cumplimiento. Este comando de espera se utilizará para mantener el control de cumplimiento.
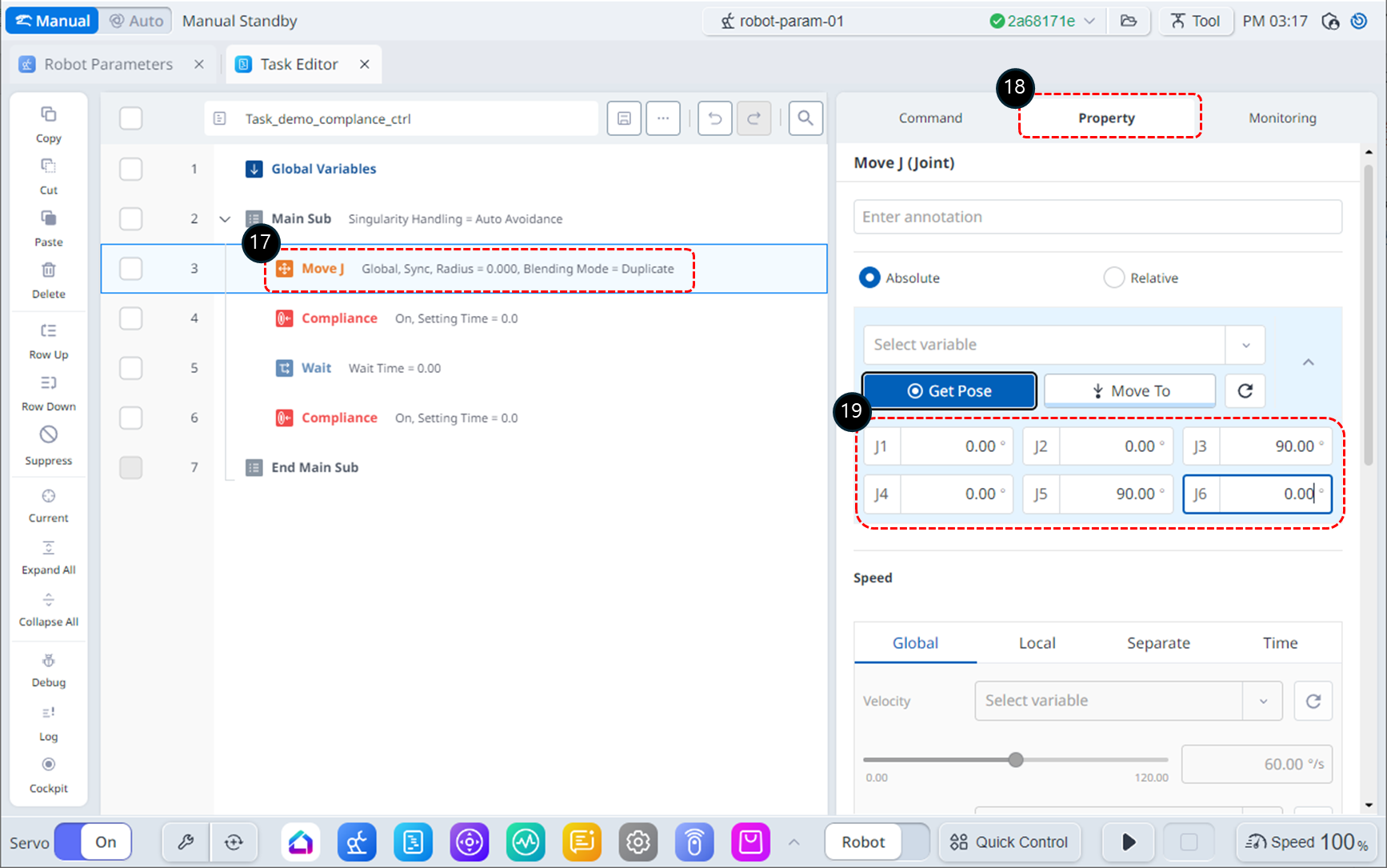
Seleccione el comando MoveJ en la línea 3.
Elija la pestaña Propiedad.
Modificar la posición de destino de MoveJ a (0, 0, 90, 0, 90, 0) grados. Dependiendo del espacio de instalación del robot, el ángulo del J1 se puede ajustar si es necesario.
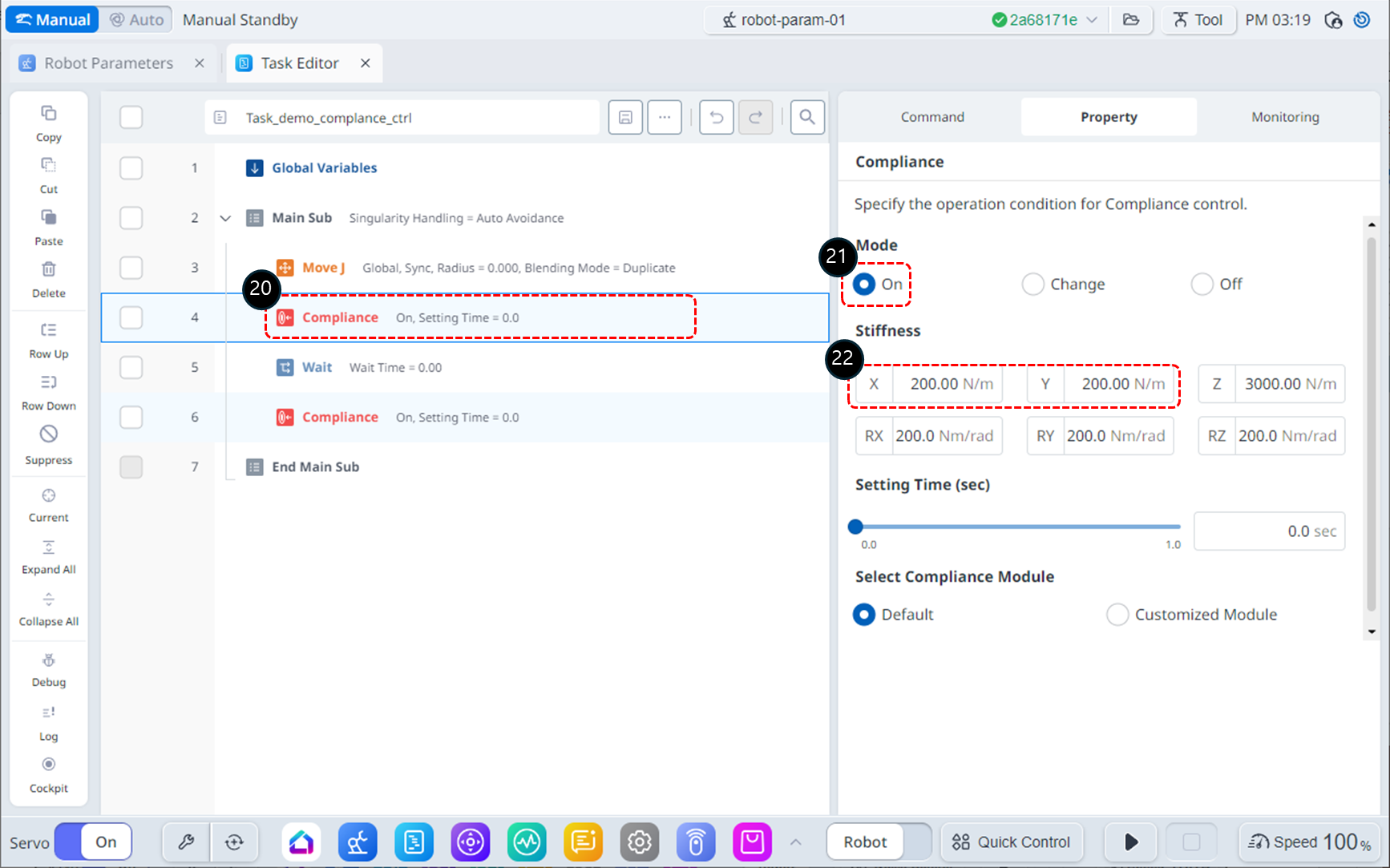
Seleccione el comando Compliance en la línea 4.
En la pestaña Propiedad, establezca el modo de la siguiente manera: Mode ON activa el control de cumplimiento.
Modo: Adelante
Establezca la rigidez de la siguiente manera: Baje la rigidez en las direcciones X e Y para que el robot responda más suavemente en esas direcciones.
X : 200 N/m
Y : 200 N/m
Z: 3000 N/m (por defecto)
Rx, Ry, Rz : 200 Nm/rad (por defecto)
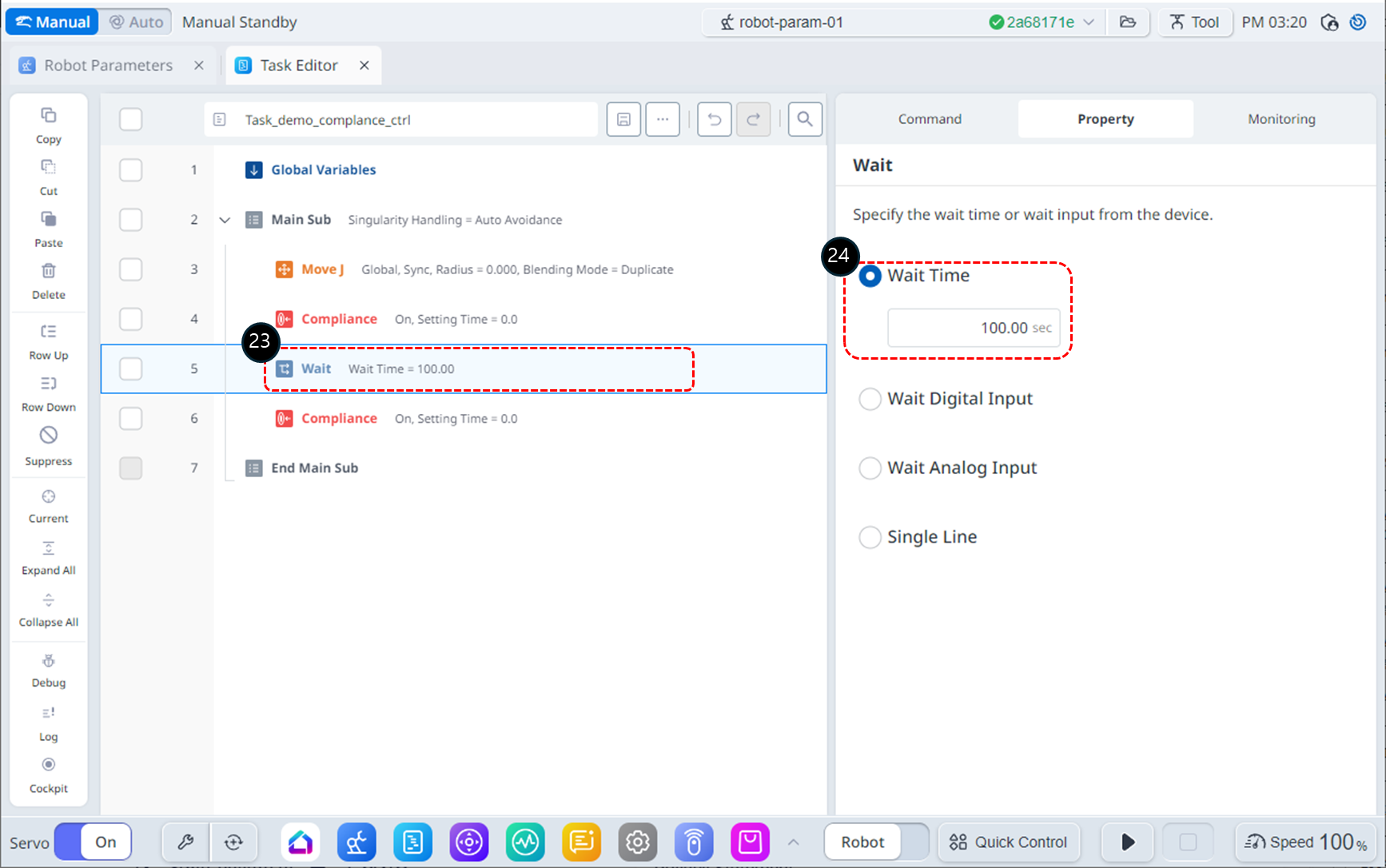
Seleccione el comando Wait en la línea 5.
Establezca el tiempo de espera de la siguiente manera.
Tiempo de espera : 100 seg
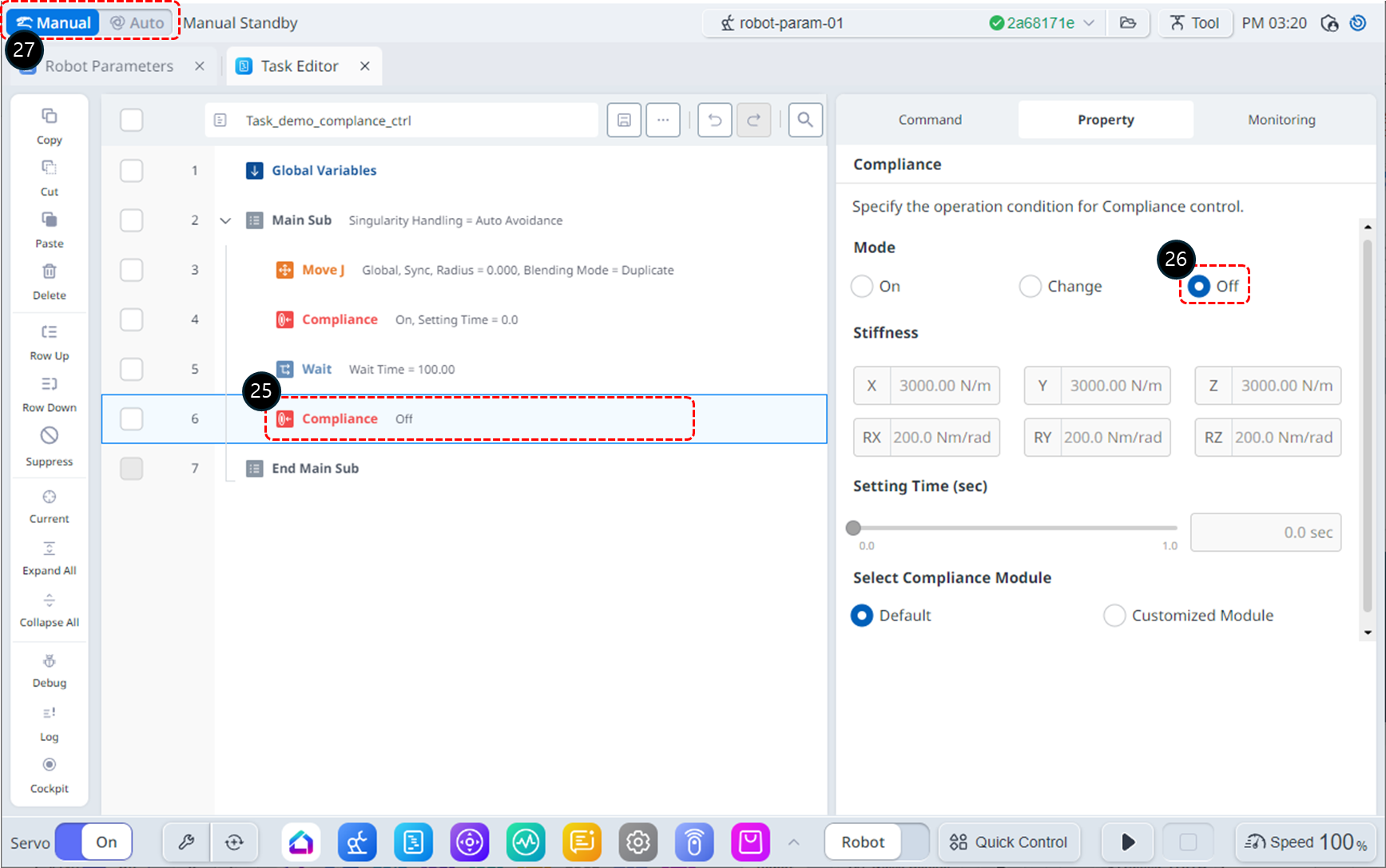
Seleccione el comando Compliance en la línea 6.
En la pestaña Propiedad, establezca el modo de la siguiente manera: Mode Off desactiva el control de cumplimiento.
Modo: Apagado
Cambie el modo de operación a Auto. La pestaña Propiedad cambiará automáticamente a la pestaña Monitoreo.
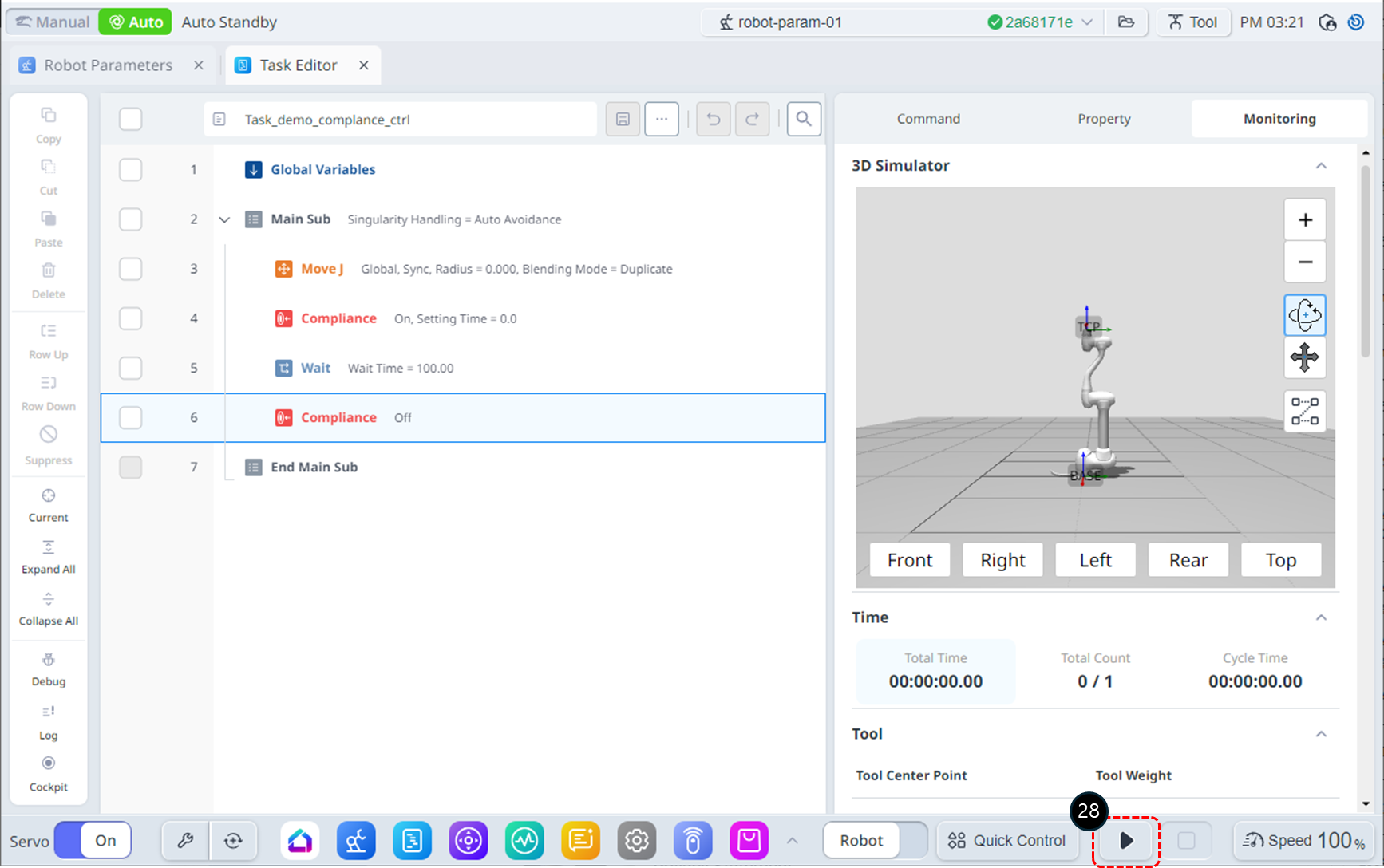
Haga clic en el botón Ejecutar. El robot se moverá a la posición inicial, iniciará el control de cumplimiento y permanecerá estacionario durante 100 segundos. Durante este tiempo, empuje suavemente el efector final del robot hacia el cuerpo del robot. El robot se detendrá con un error de colisión (o error de límite de fuerza TCP). En el estado de parada de seguridad causado por la colisión, el led del robot mostrará un color amarillo.
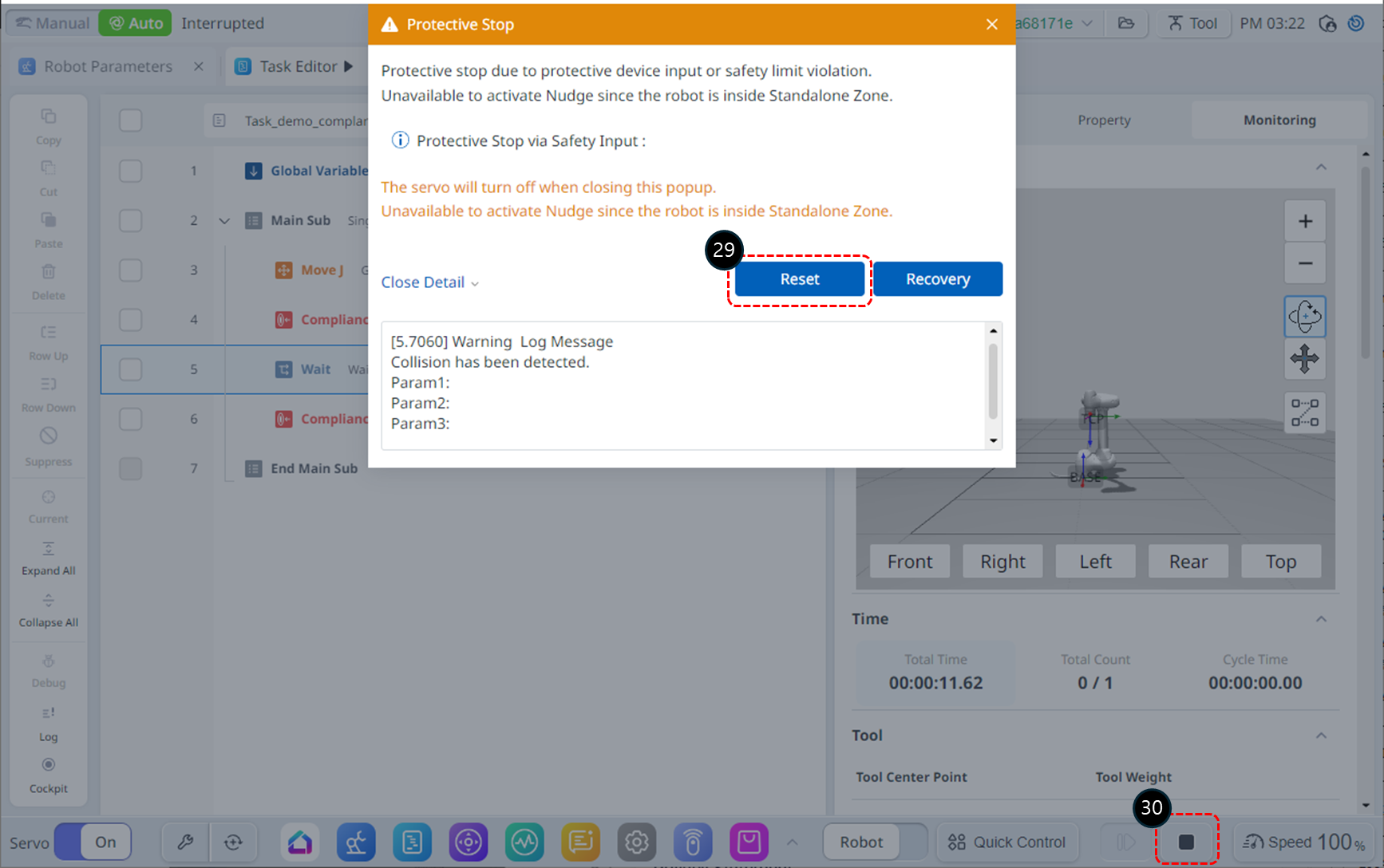
Haga clic en el botón Restablecer en la ventana de advertencia de parada de seguridad. El programa de tareas reanudará su funcionamiento.
Haga clic en el botón Detener para terminar el programa.
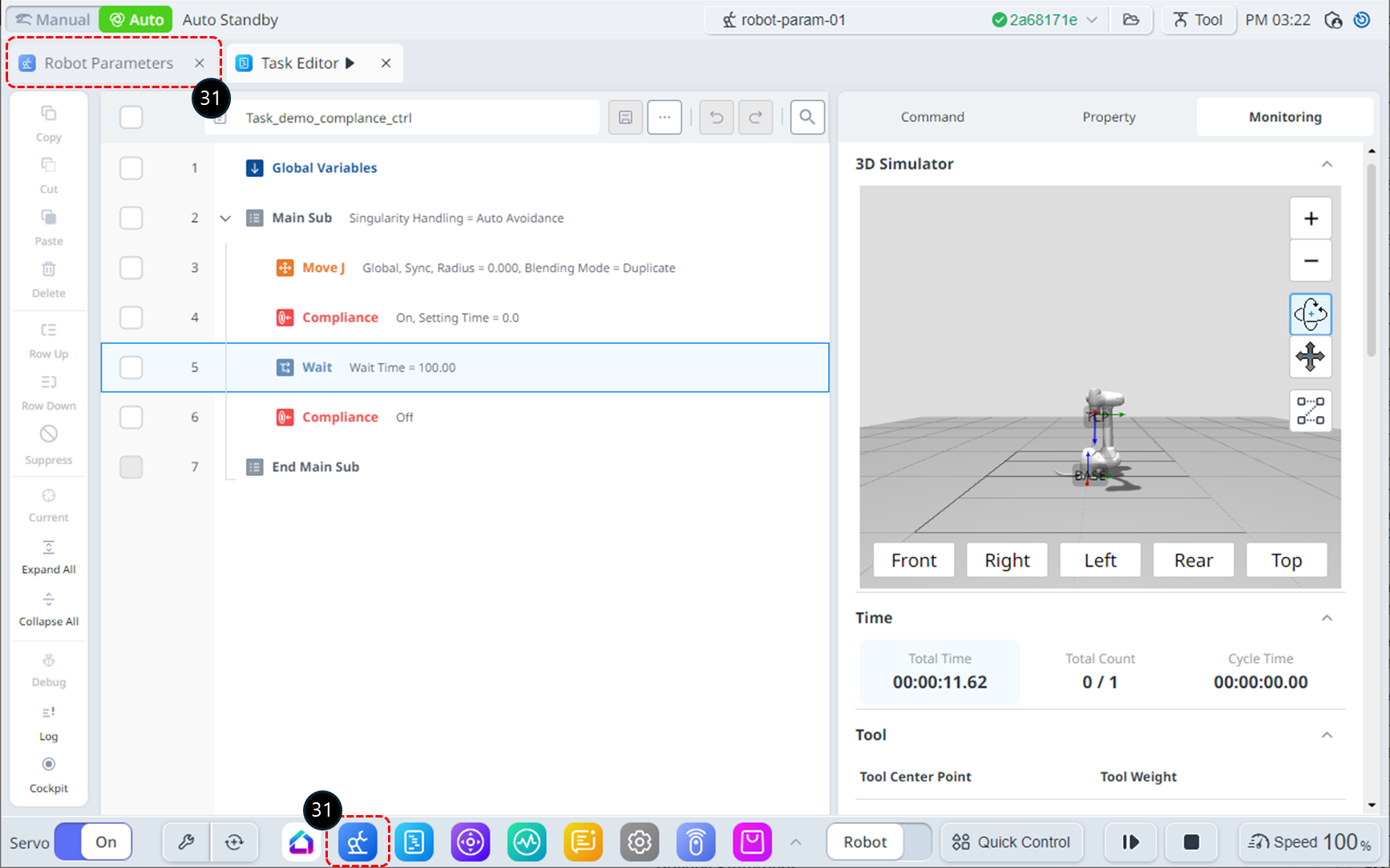
Para resolver problemas de colisión, se debe reducir la sensibilidad de colisión en los ajustes de seguridad. (Si hay un problema de límite de fuerza TCP, el parámetro de fuerza TCP debe aumentarse.) Seleccione el módulo Parámetros del robot en el menú inferior. Alternativamente, puede seleccionar la pestaña del módulo de parámetros de robot en la esquina superior izquierda, que funciona igual.
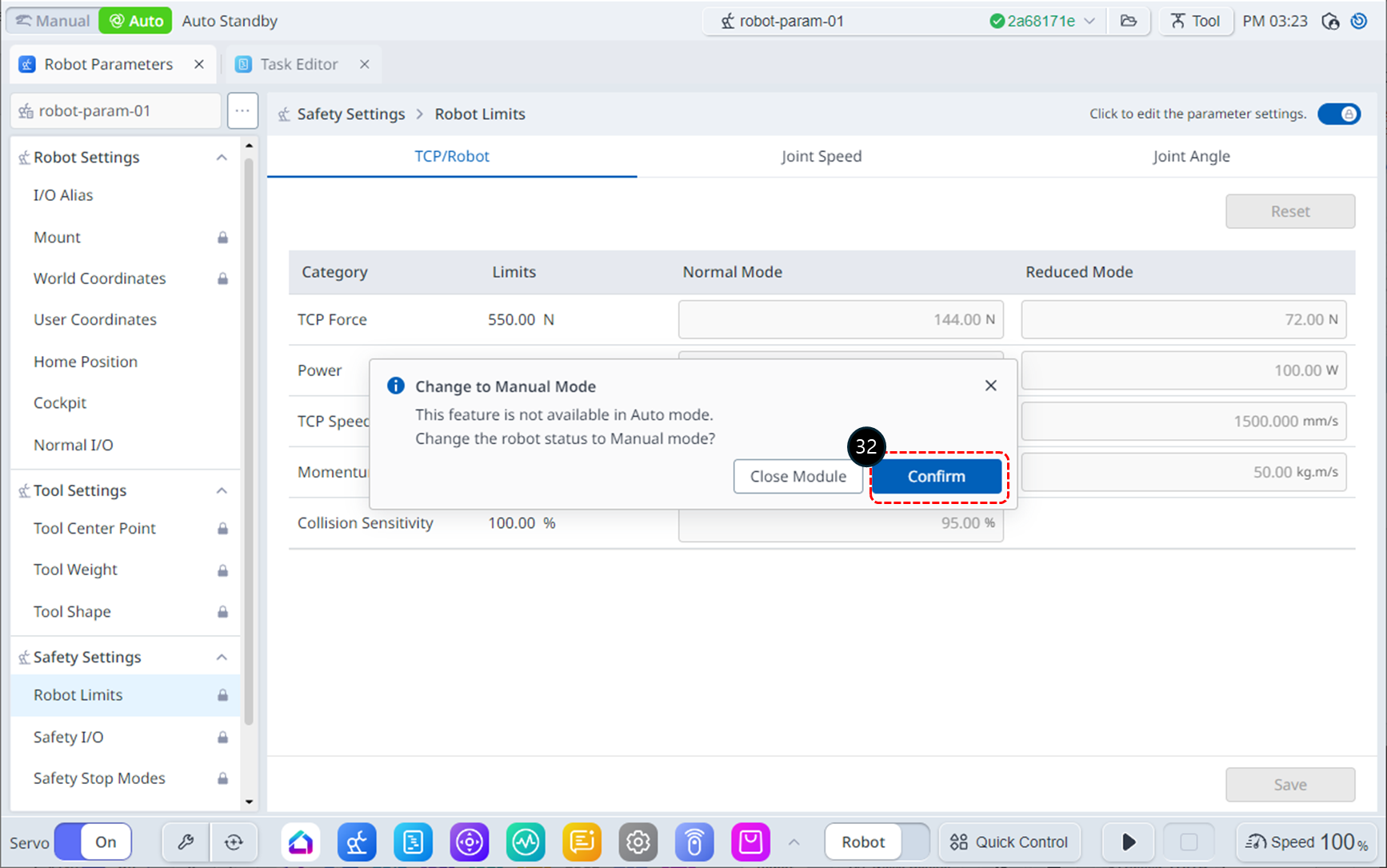
En el modo Auto, acceder al módulo Parámetros del robot activará una ventana de notificación. Haga clic en el botón Confirmar para cambiar al modo Manual.
Seleccione Límites de robots en Configuración de seguridad.
Habilite el estado de edición de parámetros. Si aparece una ventana de entrada de contraseña, consulte los pasos 6–7.
Modificar la sensibilidad de colisión al 50%.
Haga clic en el botón Guardar para guardar la configuración. Si aparece la ventana Revisión de parámetros del robot, revise las modificaciones y haga clic en el botón Aplicar.
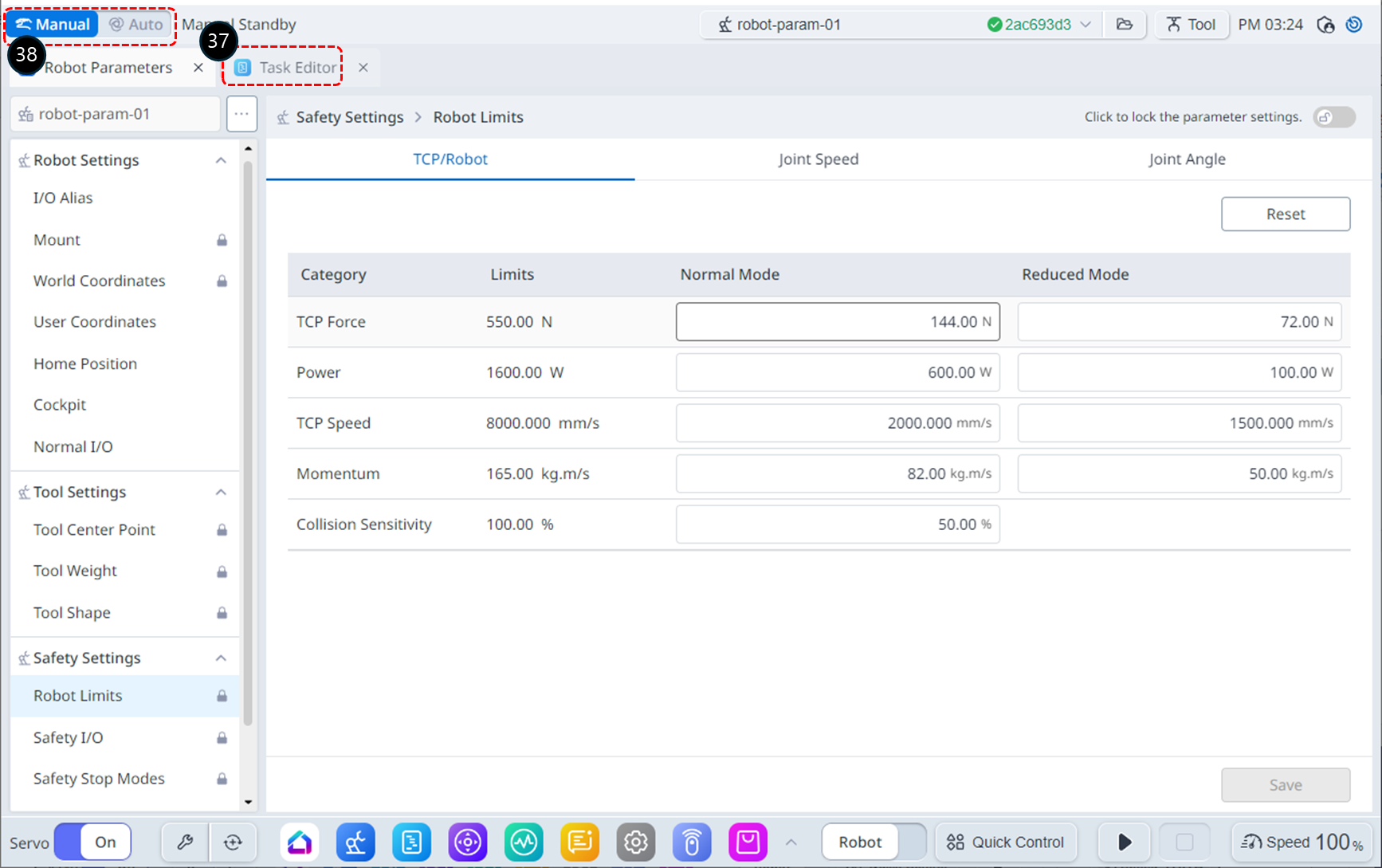
Seleccione la pestaña del módulo Editor de tareas.
Cambie al modo automático para ejecutar el programa de tareas.
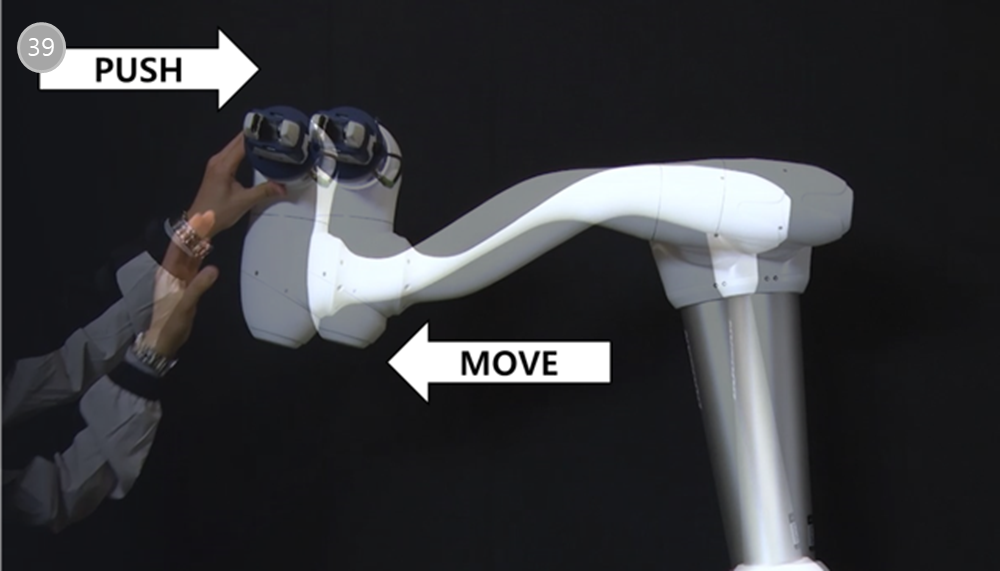
Haga clic en el botón Ejecutar. Durante el tiempo de espera, empuje suavemente el efector final del robot hacia el cuerpo del robot. El robot se moverá debido a la fuerza de empuje, y una vez que sueltes tu mano, volverá a su posición original.