
Motion-Welding Syncing Signals between Robot and Welder
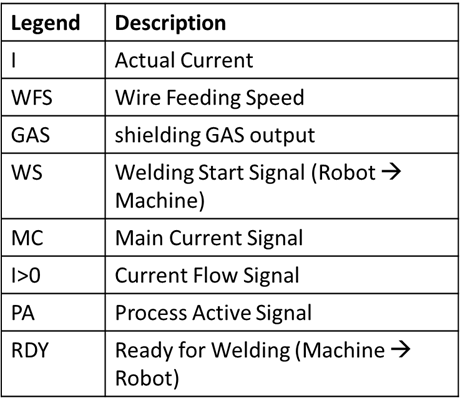
- Welding machine link signal chart signal names are as follows:
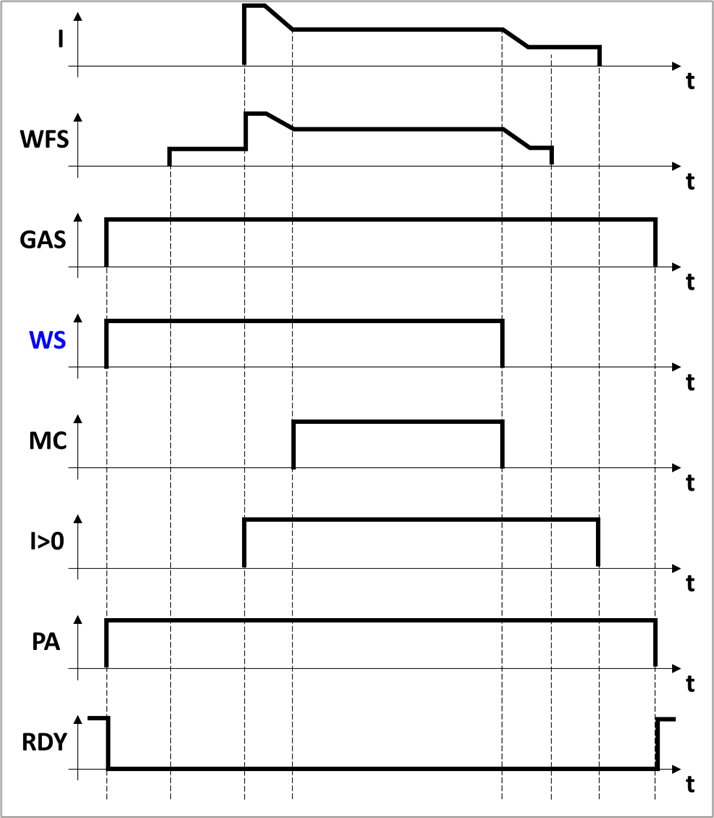
The controller-welder communication sequences and motion syncing sent by the robot to the welder are as shown in the chart below
Order
Controller
Communication direction
Welding Machine
1. Digital welder welding condition setting complete
←
- machine ready(1): when machine ready is selected for use
- welding conditions complete
→
2. Controller prepared
- error reset(1): when error reset is selected for use
→
3. Welding start
- welding start(1)
→
- Motion begins when the signal is completely received from the welder 3)
←
- current flow(1)
- main current(1): when main current is selected for use
- machine ready(0): when machine ready is selected for use
- process active(1): when process active is selected for use
4. Welding complete
- welding start(0)
→
- Motion ends when the signal is completely received from the welder 4)
←
- current flow(0)
- main current(0): when main current is selected for use
- machine ready(1): when machine ready is selected for use
- process active(0): when process active is selected for use
- The start of the robot motion is synced to the current flow signal of the welder, but when the main current item is set, its signal is synced instead.
- The end of the robot motion is synced to the current flow signal of the welder, but when the process active or machine ready item is selected, the selected signal is synced instead.