
Move Panel
Move Menu Layout
| Item | Description | |
|---|---|---|
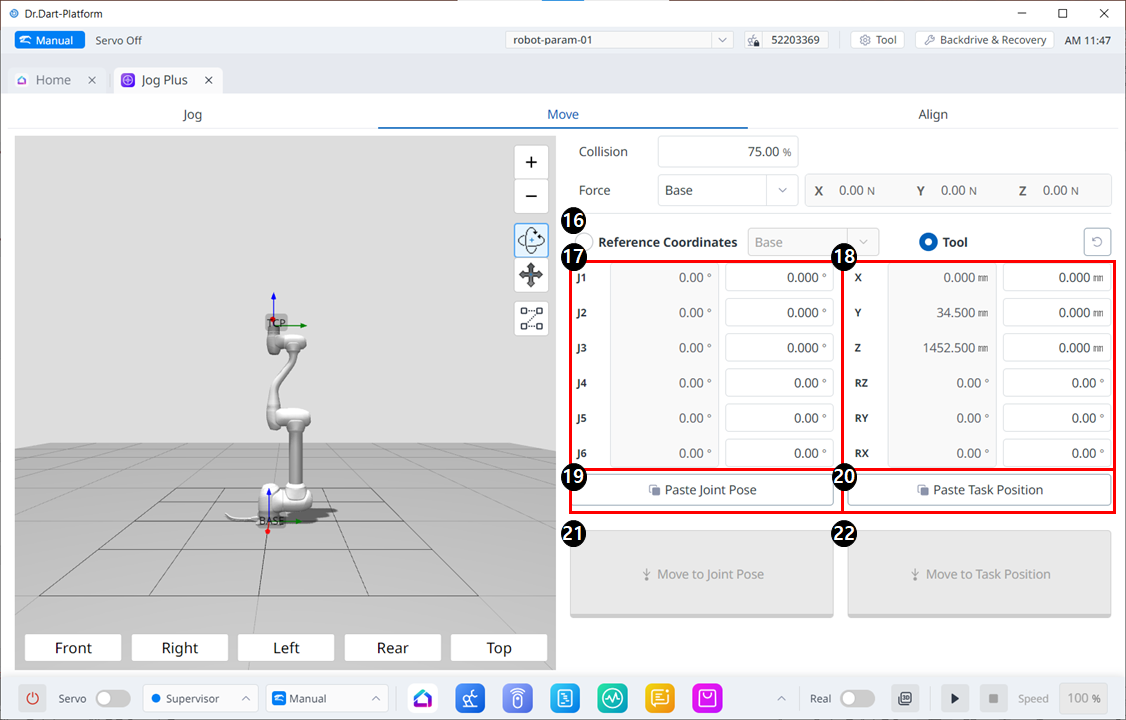
| 16 | Reference Coordinates | Select the reference coordinate system to be used for the task coordinates in Figure 18. You can choose Base, World, or User coordinates. |
| 17 | Joint Posture | Displays the current robot posture and the target joint posture. |
| 18 | Task Posture | Displays the current robot posture and the target task posture that fit the selected reference coordinate system. |
| 19 | Paste Joint Posture | Paste the posture value copied to the clipboard into the joint posture panel. |
| 20 | Paste Task Posture | Paste the posture value copied to the clipboard into the task posture panel. |
| 21 | Joint Move button | This button causes the robot to move to the target joint posture. |
| 22 | Task Move button | This button causes the robot to move to the target task posture. |