
Moving with Angle Setting
To move the robot at a specific angle, follow these steps:
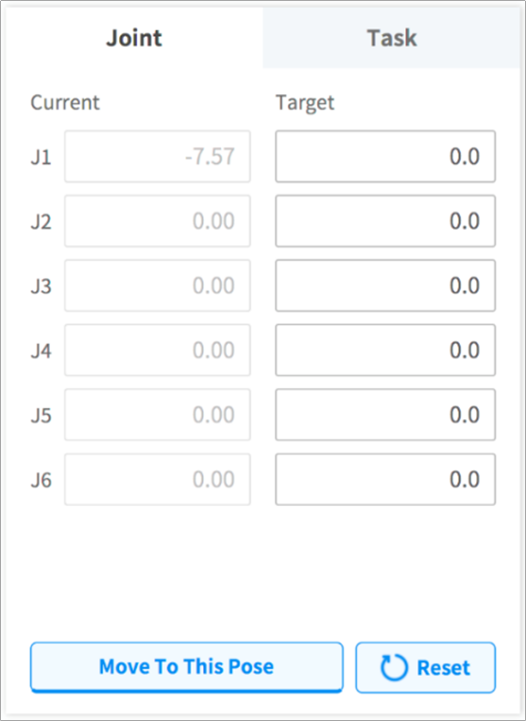
- Select the Move tab and select the Joint tab.
- Enter the target angle of the robot joint.
- Enable the Real Mode.

- Tap and hold the Move to Corresponding Pose button to adjust the robot joint angle.