
Movement Screen
The robot can be moved by target angle/coordinates on the Move screen. If the coordinates the robot must move to are known or if the robot must be moved up to coordinates in decimal points, it is possible to move the robot by entering coordinates.
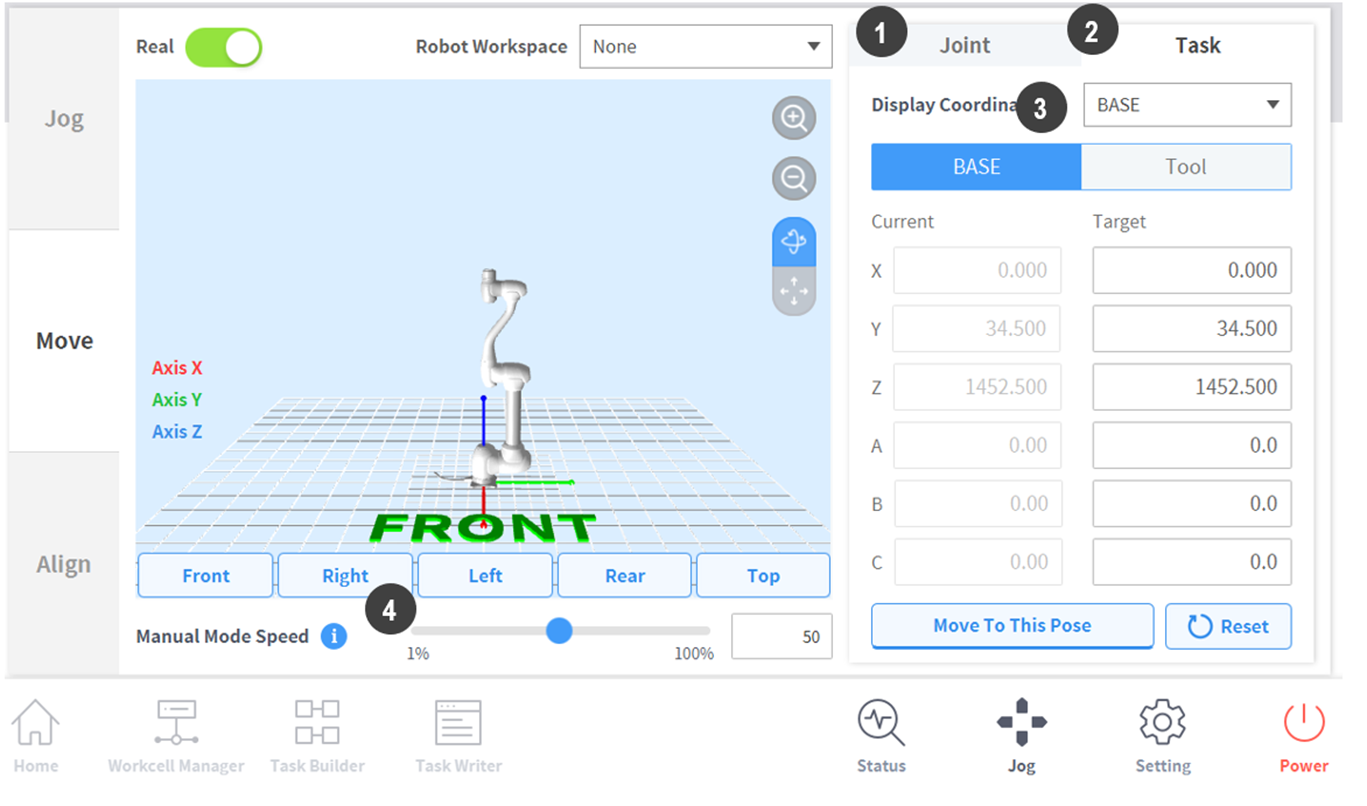
No. | Item | Description |
1 | Joint | It configures the reference coordinate to use when moving the robot with a jog. |
2 | Task | It configures the reference angle to use when moving the robot with a jog. |
3 | Reference Point Setting | It configures the reference point to align the task coordinate.
|
4 | Manual Mode Speed | It configures the robot’s movement speed in manual mode. The speed can be adjusted by dragging the slider pointer. If the slider pointer is at 100%, the corresponding maximum joint speed on the Move tab is 30 deg/s, and the maximum task speed is 250 mm/s. The speed influences the jog and button operation speed. |