
Robot Limits Setting
It sets the safety limits of safety monitoring functions.
Note
The limit and initial safety settings may vary according to the robot lineup.
Safety limits is the condition where the safety-rated monitoring function triggers the stop function. When stop is completed, the position of the robot and force applied externally may differ from the configured safety threshold.
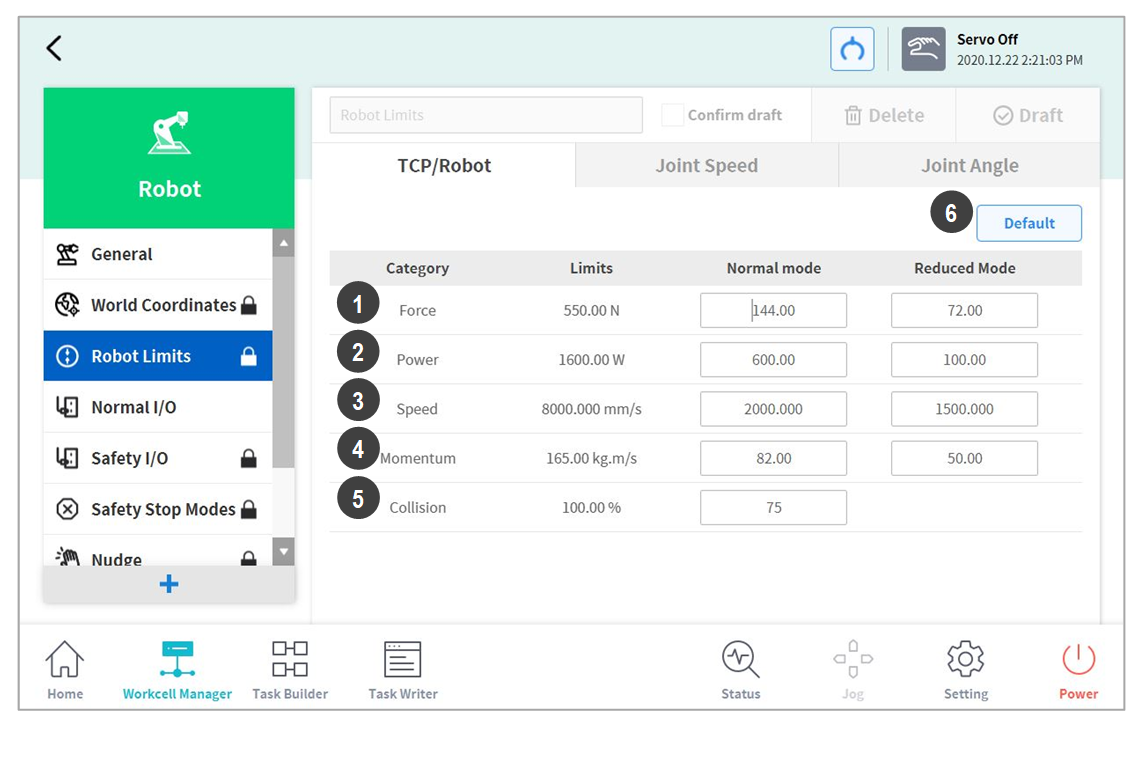
TCP/Robot Limits
To set the TCP/Robot Limits, go to the Robot Workcell and select Robot > Robot Limits > TCP/Robot. The TCP/Robot Limits setting screen layout is composed as follows:
No. | Item | Description |
|---|---|---|
1 | Force (N) | It can limit the force level applied to the tool center point (TCP). |
2 | Power (W) | It can limit the mechanical power level of the robot. |
3 | Speed (mm/s) | It can limit the speed of the tool center point (TCP). |
4 | Momentum (kg.m/s) | It can limit the momentum size of the robot. |
5 | Collision (%) | It configures the collision detection sensitivity. |
6 | Default Value | It resets the TCP/Robot Limits settings to default values. |
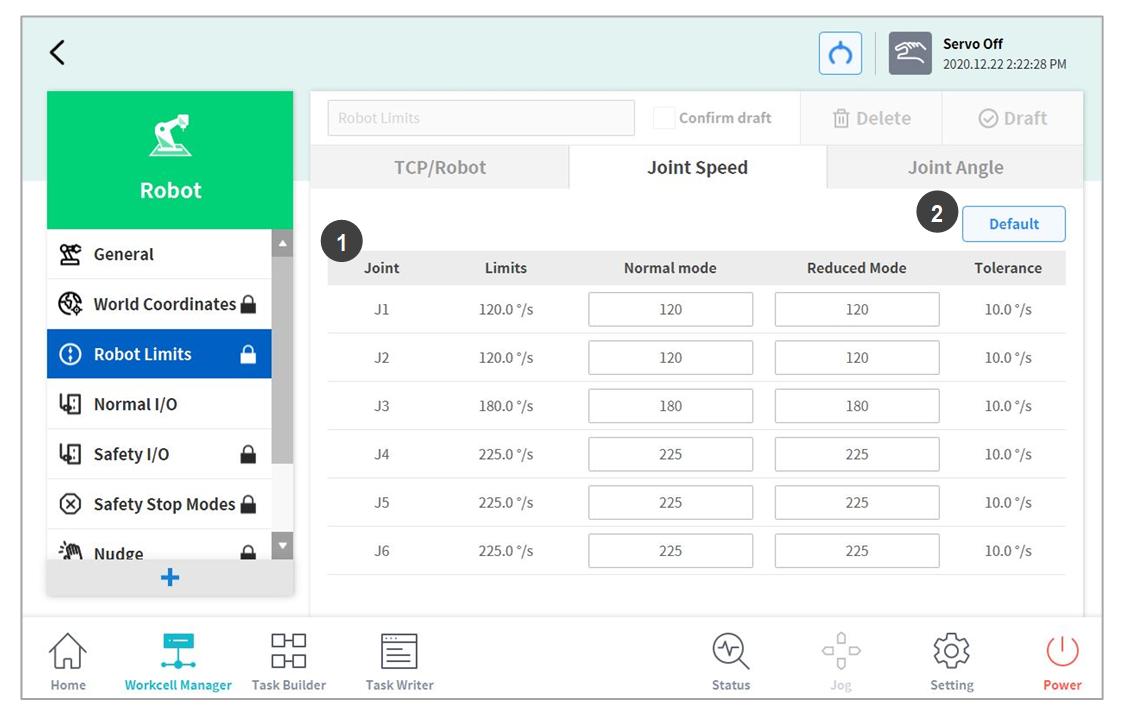
Joint Speed Limits
To set the joint speed limits, go to the Robot Workcell and select Robot > Robot Limits > Joint Speed. The Joint Speed Limits setting screen layout is composed as follows:
No. | Item | Description |
|---|---|---|
1 | Joint Speed | It can limit the speed of each joint. (J4 cannot be set for the P series.) |
2 | Default Value | It resets the Joint Speed Limits settings to default values. |
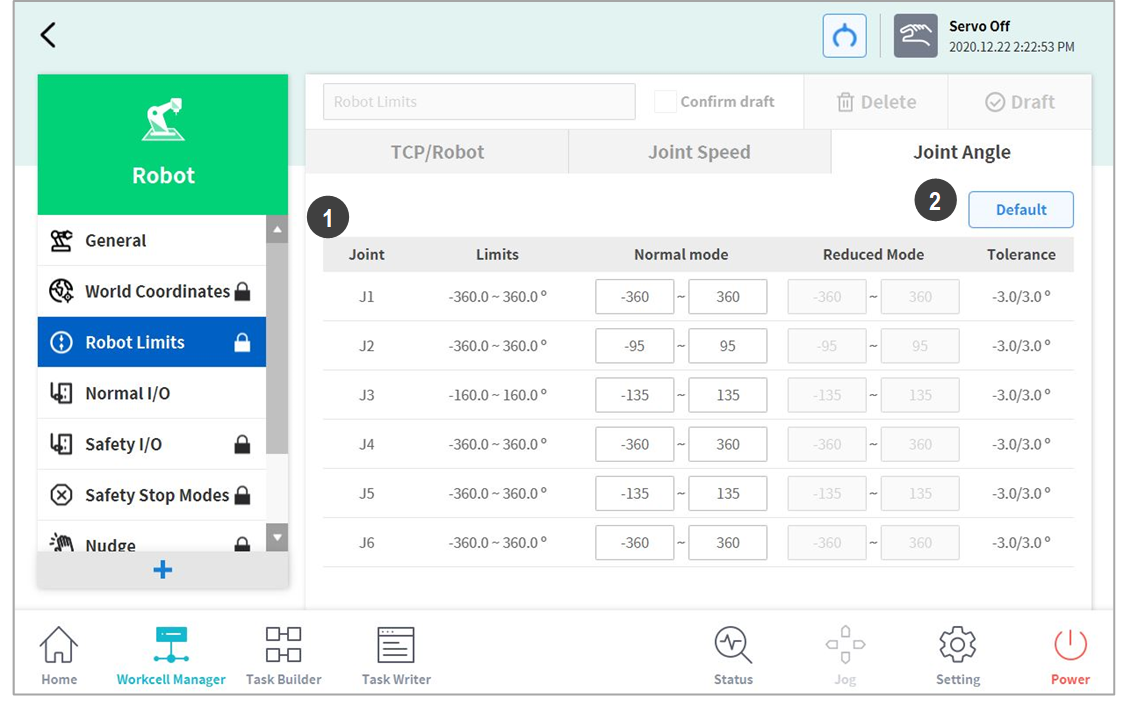
Joint Angle Limits
To set the joint angle limits, go to the Robot Workcell and select Robot > Robot Limits > Joint Angle. The Joint Angle Limits setting screen layout is composed as follows:
No. | Item | Description |
|---|---|---|
1 | Angle Range of each Joint | It can limit the angle range of each joint. (J4 cannot be set for the P series.) |
2 | Default Value | It resets the Joint Angle Limits settings to default values. |