
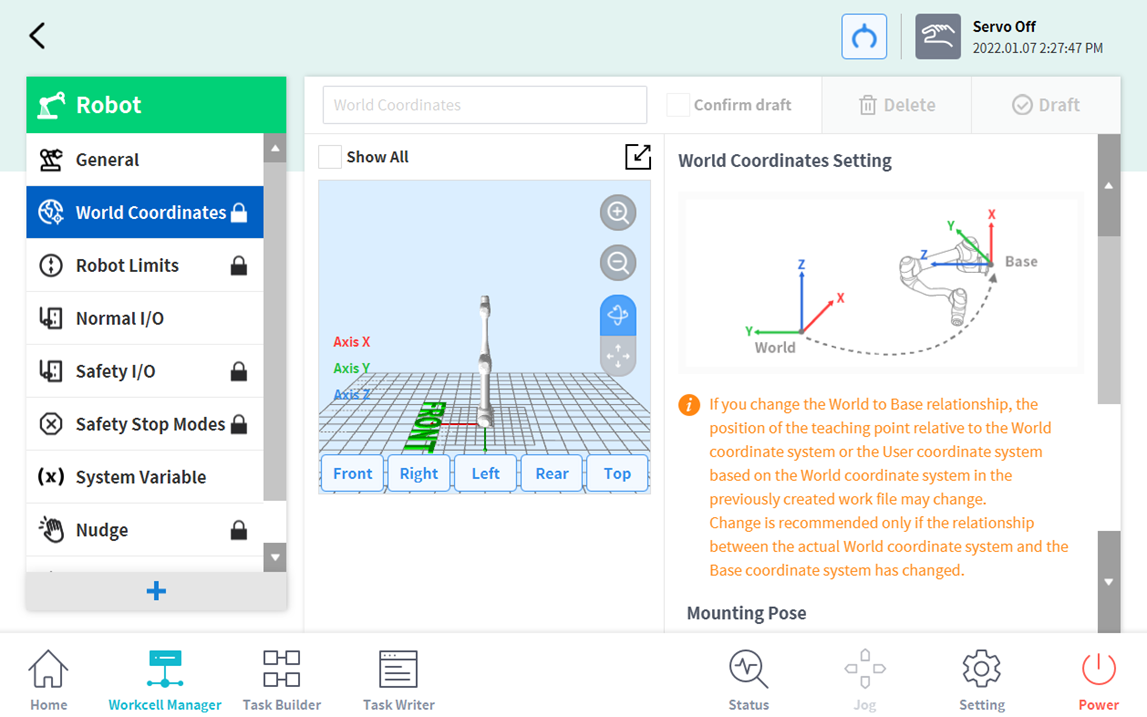
World Coordinates Setting
A coordinate system representing the robot and workpiece can be set. This coordinate system is called World Coordinates, and it is different from Base Coordinates, which are fixed to the base. It is possible to set the pose of Base Coordinates using World Coordinates, and World Coordinates can be selected when teaching and moving using the robot in Task Builder and Task Writer. To set World Coordinates, tap the 
- Tap the Edit button at the top.
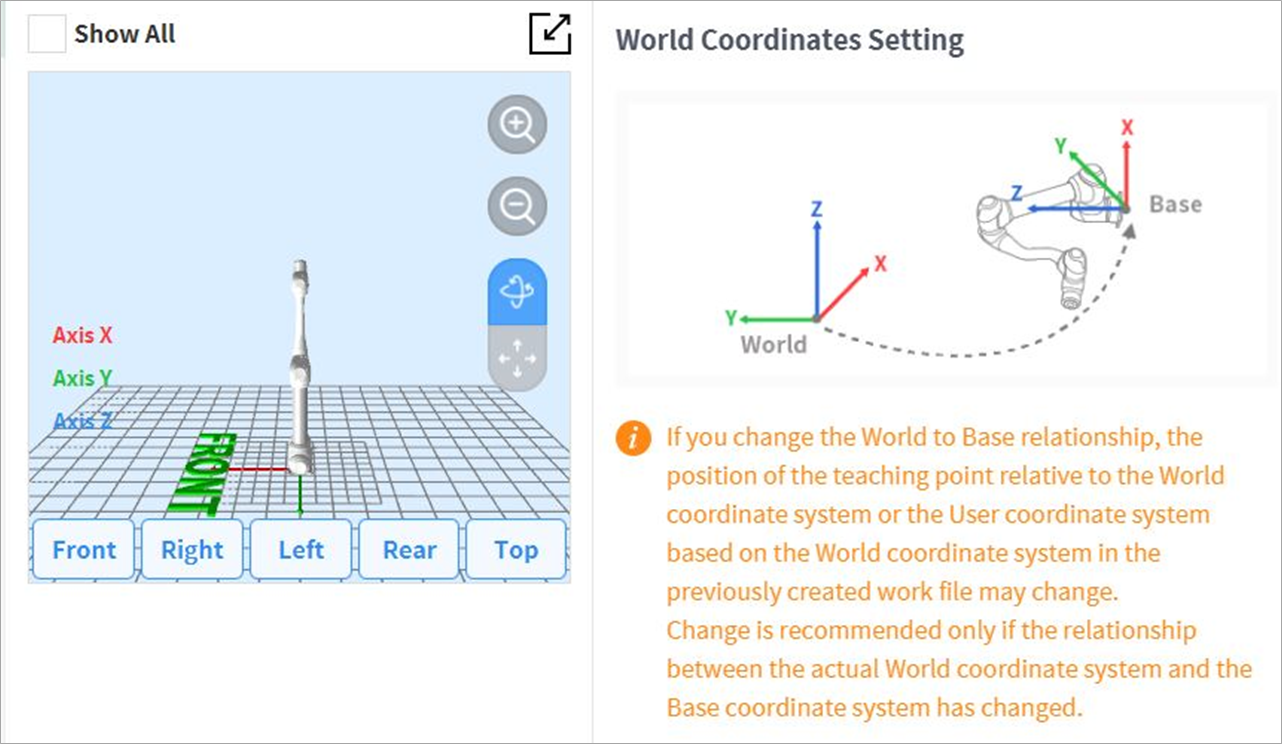
Please refer to the figure depicting the relationship between the World Coordinate and Base Coordinate, as well as related precautions.
Warning
When changing the relationship between World and Base coordinates, the teaching point of World Coordinates or user coordinates based on World Coordinates can change. Changes are only recommended when the actual relationship between World Coordinates and Base Coordinates are changed.
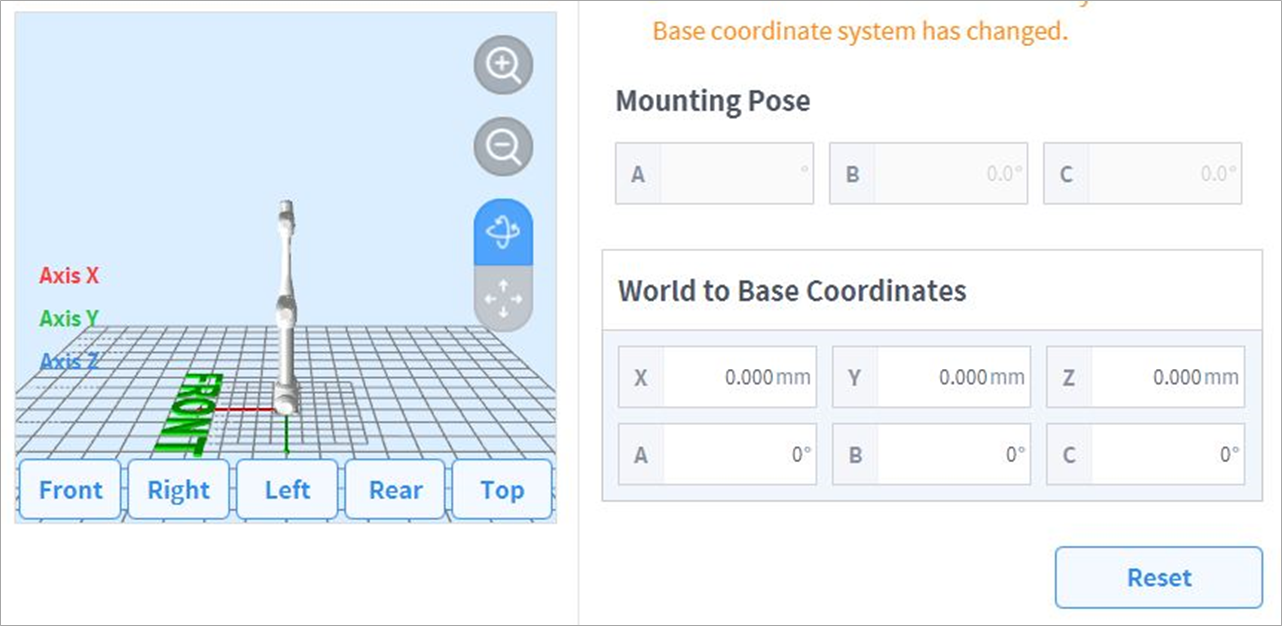
- The mounting pose (installation inclination) is displayed on the right center. In general, World Coordinates describe the work environment from the user’s perspective, so the Z-direction of World Coordinates is in the direction of the ceiling. Since one axis of Base Coordinates is fixed to the bottom plane of the robot, the relationship between World Coordinates and Base Coordinates changes according to the robot’s installation location/pose. The above figure assumes that the robot is installed on a wall. In this case, the Z-axis of Base Coordinates is perpendicular to the wall, which is in parallel to the Y-axis of World Coordinates, and the mounting pose inclination and rotation are displayed as 90 and 0 degrees, respectively. The relationship between World and Base Coordinates is defined as the relationship of the Base Coordinates based on World Coordinates. If there is a predefined layout for the work environment, set the coordinates accordingly. The values X/Y/Z mean movement, and the values A/B/C mean rotation based on the definition of Euler Z-Y-Z. If the mounting pose is defined according to the robot’s installation pose, it is appropriate to use the rotation angle of B/C as the mounting pose B/C. However, if the mounting pose is set using the Auto assumption function, the assumed value may contain a deviation, so it recommended to use the rotation angle defined according to the layout.
- Tap the Apply button.
- Tap the Confirm button.
Note
User programs created using Task Builder and Task Writer after applying the installation inclination in SW versions earlier than GF020400 must set World Coordinates with the installation inclination applied when updating to SW versions later than GF020400 and convert all Base Coordinates into World Coordinates within the user program in order to properly use existing teaching points.
If multiple robots are working in a common work space or if the robot is installed on a moving device such as a mobile base or linear track, the relationship and teaching point position between the workpiece and robot base may change. In such environments, World Coordinates, which are easy to teach work and share, can be set.
When a tool is installed or replaced, the weight of the tool must be configured before operating the robot. For more information about setting tool weight, refer to “Tool Weight Setting".