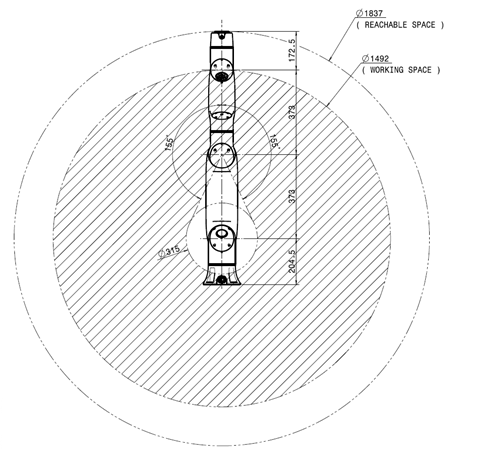
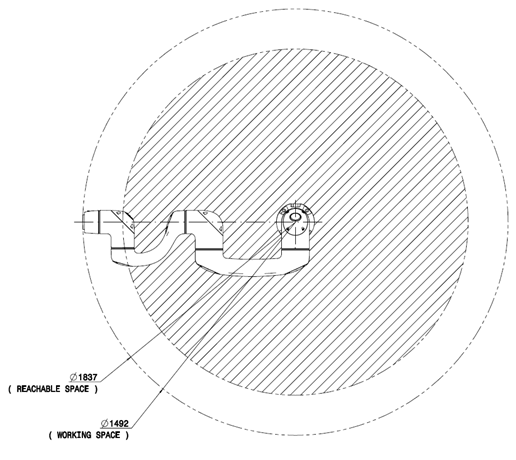
Robot operating space
E0509
|
|
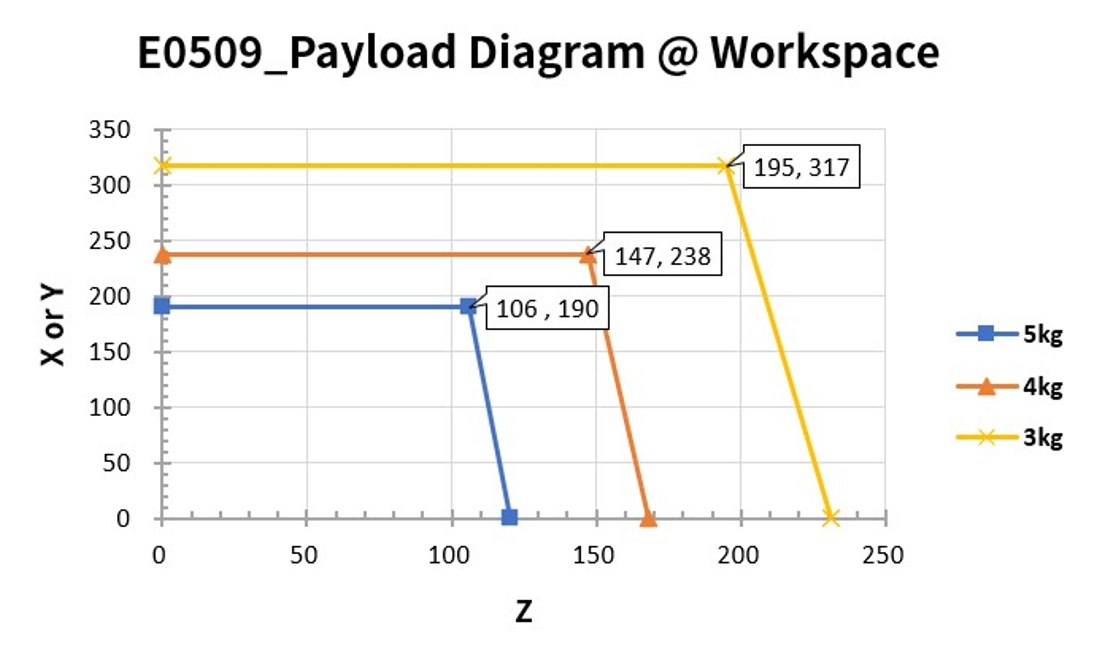
Max. Payload within operating space
The maximum payload of the robot within its operating space changes according to the distance from the center of gravity. Payload per distance is as follows:
Note
This load diagram assumes a small tool load volume. Tools with a larger volume will have greater limitations in payload above the tool’s center of gravity compared to a tool with an equal weight but smaller volume, and in such cases, vibration may occur.
E0509
Allowed Moment and Inertia
The allowed moment and inertia of the robot's J4-J6 are as follows:
|
Model Name |
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
Allowed Moment |
Inertia |
Allowed Moment |
Inertia |
Allowed Moment |
Inertia |
|
|
E0509 |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
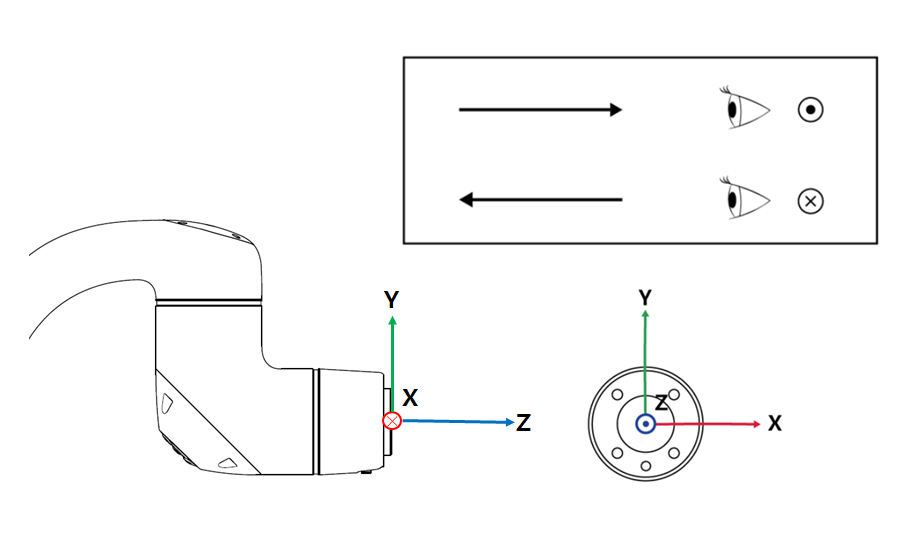
Tool Center Point (TCP)
Refer to the figure below for TCP.
Basic specifications
|
Model Name |
E0509 |
|||||
|---|---|---|---|---|---|---|
|
Weight |
22 kg |
|||||
|
Payload within Work Radius |
5 kg |
|||||
|
Max. Work Radius |
900 mm |
|||||
|
Number of Axes |
6 |
|||||
|
Max. TCP Speed |
Over 1 m/s |
|||||
|
Position Repeatability (ISO 9283) |
±0.05 mm |
|||||
|
Protection Rating |
IP 66 |
|||||
|
Noise |
< 60 dB |
|||||
|
Installation Direction |
Any Orientation |
|||||
|
Controller and Pendant |
Doosan Controller, DART Platform, Smart Pendant (Option) |
|||||
|
Vibration and Acceleration |
10≤f<57㎐ - 0.075mm amplitude 57≤f≤150㎐ – 1G |
|||||
|
Impact |
Max Amplitude : 50㎨(5G)
|
|||||
|
Operating Temperature |
0 ℃ ~ 45 ℃ (273K to 318K) |
|||||
|
Storage Temperature |
-5 ℃ ~ 50 ℃ (268K to 323K) |
|||||
|
Humidity |
90% RH (non-condensing) |
|||||
Axis Specifications
|
Model Name |
E0509 |
|||
|---|---|---|---|---|
|
Operating Angle |
||||
|
J1 |
±360° |
|||
|
J2 |
±360° |
|||
|
J3 |
±155° |
|||
|
J4 |
±360° |
|||
|
J5 |
±155° |
|||
|
J6 |
±360° |
|||
|
Max. Speed per Axis (rated payload operation) |
||||
|
J1 |
120 °/s |
|||
|
J2 |
120 °/s |
|||
|
J3 |
150 °/s |
|||
|
J4 |
225 °/s |
|||
|
J5 |
225 °/s |
|||
|
J6 |
225 °/s |
|||