Connecting External Devices
Connecting External Devices - Vision Sensor
The robot can be connected with a vision sensor (2D camera for object position measurement), and vision sensor measurements can be transferred to the robot through a network to link with commands of the robot.
Vision Sensor Setting
Communication Connection Setting
Connect the LAN ports of the devices and apply TCP/IP communication to transfer vision sensor measurements to the robot. (refer to Network Connection) Set the IP address of the vision sensor to TCP/IP 192.168.137.xxx band to allow TCP/IP communication.
Vision Work Setting
To perform object position measurement, it is necessary to have an image input and vision teaching of the target object using the vision sensor. Refer to the dedicated vision work setting program provided by the vision sensor manufacturer.
Measurement Data Format Setting
To use vision sensor measurement data in robot work, it is necessary to perform vision- robot coordinates calibration, and this must be performed before initiating work using the vision sensor setting program. The vision sensor measurement data must be transferred using the following format settings:
Format | pos | , | x | , | y | , | angle | , | var1 | , | var2 | , | … |
|---|
pos: Separator indicating the start of measurement data (prefix)
x: X coordinate value of the object measured using vision sensor
y: Y coordinate value of the object measured using vision sensor
angle: Rotation angle value of the object measured using vision sensor
Var1 … varN: Information measured using vision sensor (e.g., object dimension / defect check value) Example) pos,254.5,-38.1,45.3,1,50.1 (description: x=254.5, y=-38.1, angle=145.3, var1=1, var2=50.1)
Robot Program Setting
When the physical communication connection between the vision sensor and robot and vision sensor setting are completed, a program must be set to allow the vision sensor and robot program to be linked. It is possible to connect/communication/control functions of the external vision sensor using Doosan Robot Language (DRL), and it is possible to set up the program in the Task Writer.
Details and comprehensive examples of Doosan Robot Language (DRL) on external vision sensor functions are provided in the Programming manual.
Connecting External Device – DART Platform
The DART Platform is a software that runs on a Windows OS-based desktop or laptop. Once the controller and Desktop/Laptop are connected through the LAN Port, all functions of the teach pendant are available from the time the DART Platform is executed. At this time, the following setup procedure is required to connect with sub-controllers within the controller.
IP Address Search and Connection Setting
Communication Connection Setting
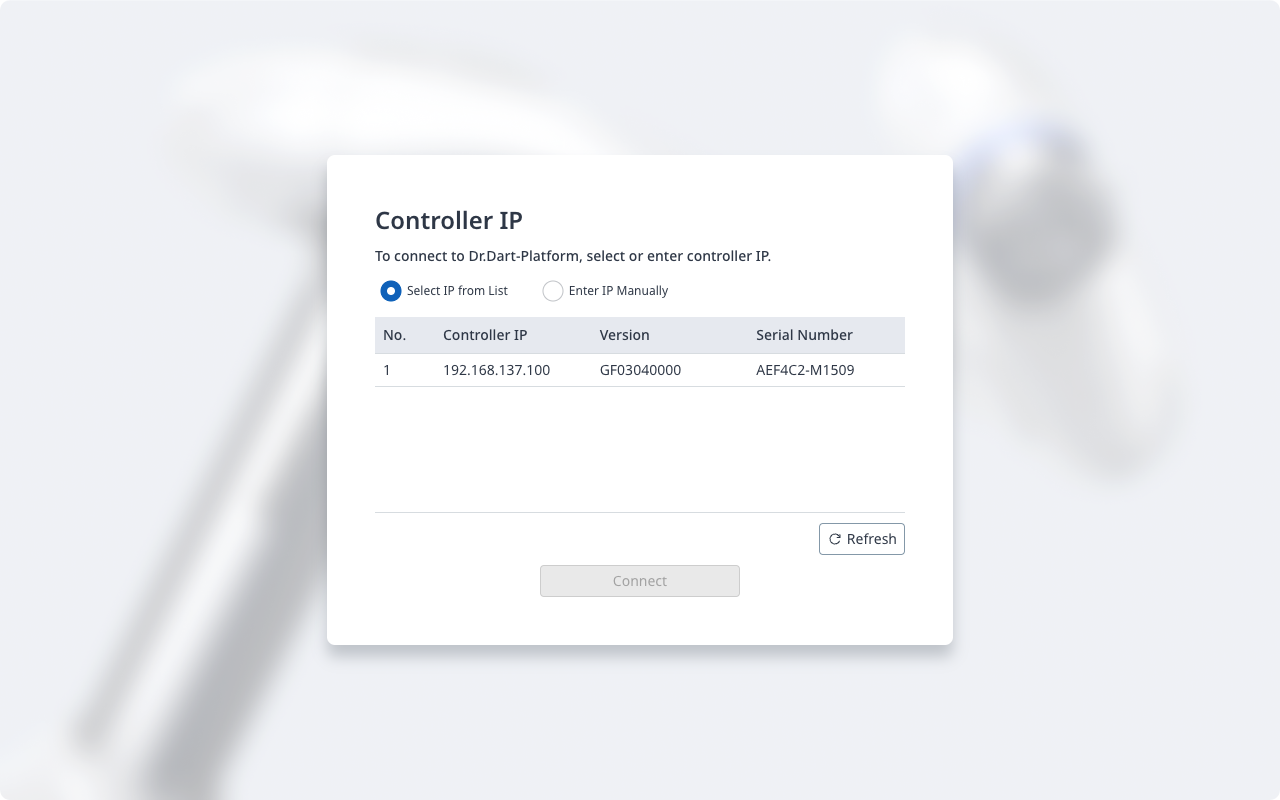
When the DART Platform is executed after connecting the laptop to the LAN port of the controller, the controller IP address, the version information of the sub-controller and the robot serial number required for establishing a connection are automatically searched.
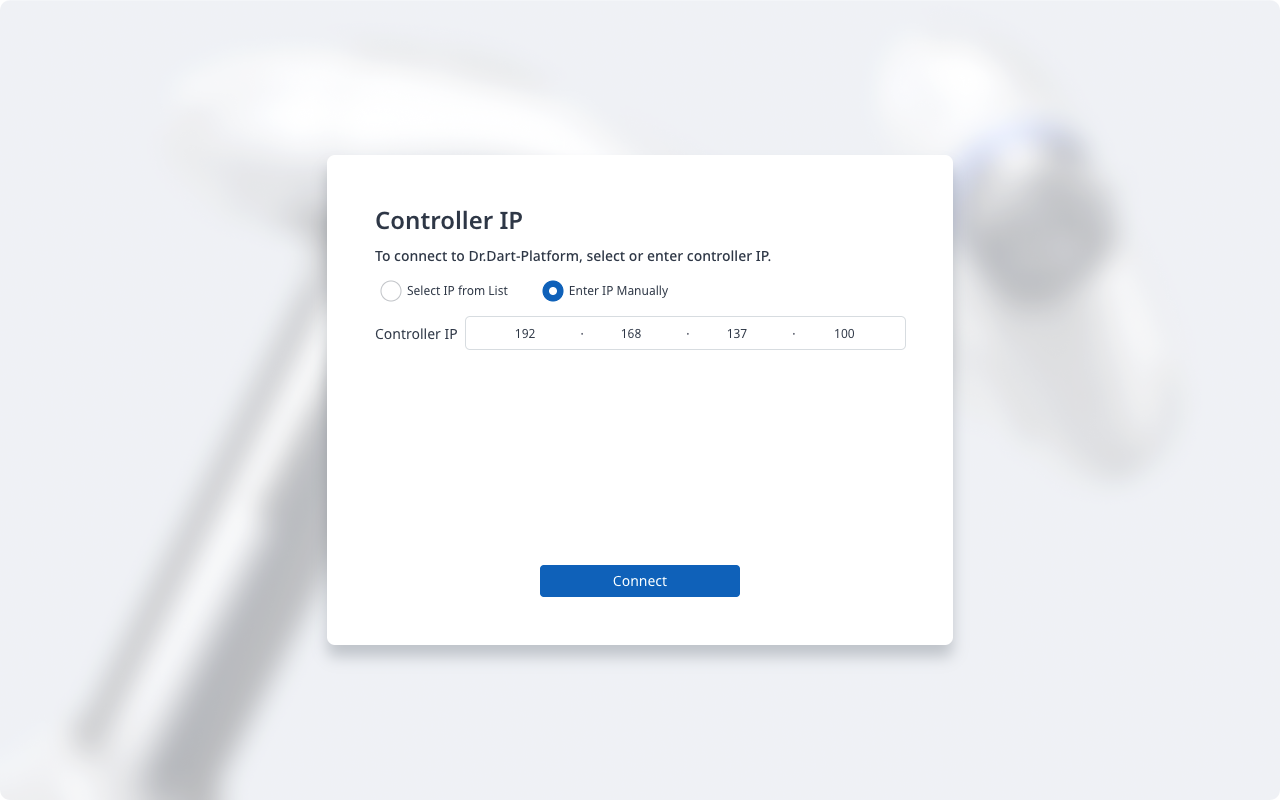
If the search fails, press the Refresh button to refresh or tap Enter IP Manually to manually enter the IP of the controller.
Selecting the serial number of the robot to be connected and pressing the Connect button establishes a connection between the DART Platform and the sub-controller and allows the robot to be operated normally.
If there is an issue with the connection, try the procedure below, but if this issue is persistent, contact the sales or service staff for assistance.
If the search results for connectable controller IP address, sub-controller version information, and robot serial number are not displayed: Press the Refresh button to search again and try to connect again according to the procedure above.
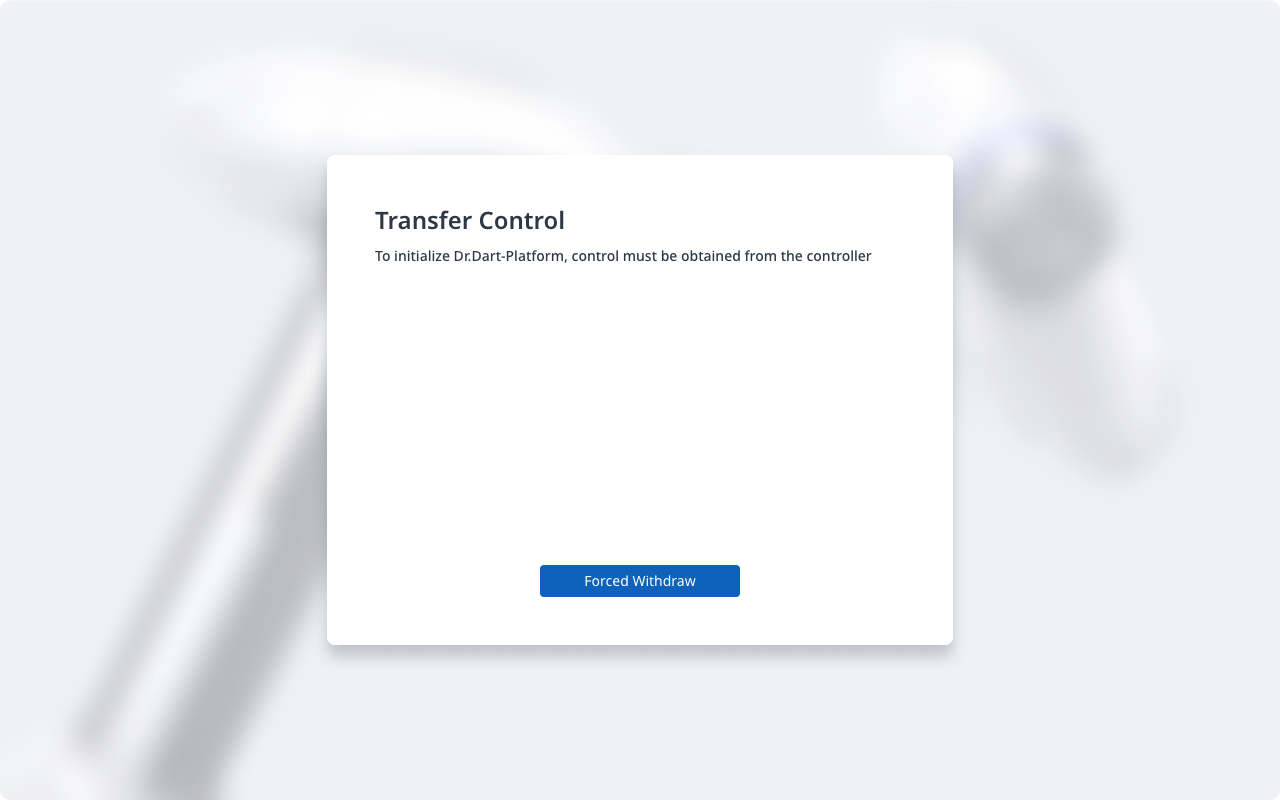
Then, if you see the Transfer Control page as shown below, tap the Forced Withdraw button to attempt to connect with the Platform.