
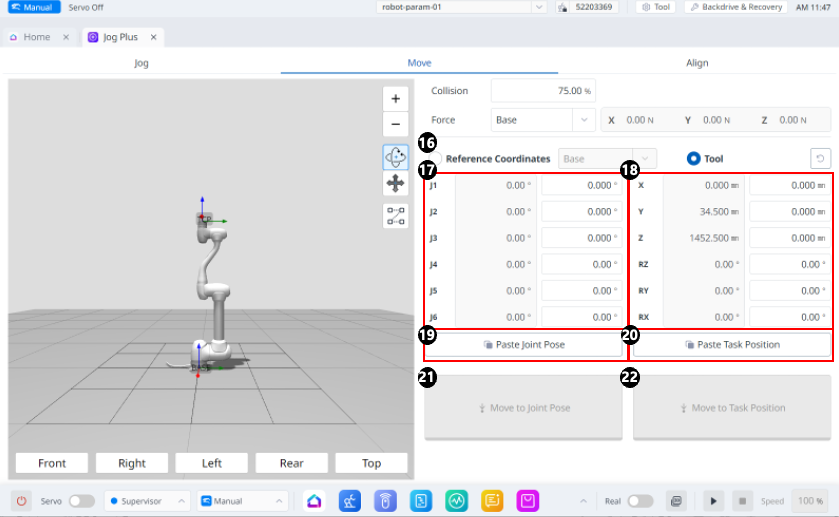
Move Panel
Menu
Items | Description | |
|---|---|---|
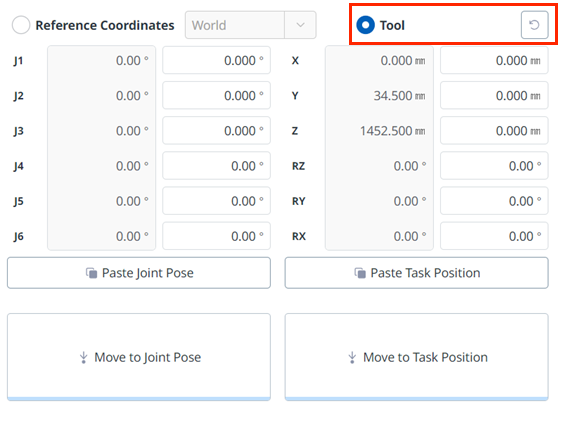
16 | Select reference coordinate system | Select the reference coordinate system to be used for the task coordinates in Figure 18. You can choose Base, World, or User coordinates. |
17 | Joint Posture | Displays the current robot posture and the target joint posture. |
18 | Task Posture | Displays the current robot posture and the target task posture that fit the selected reference coordinate system. |
19 | Paste Joint Posture | Paste the posture value copied to the clipboard into the joint posture panel. |
20 | Paste Task Posture | Paste the posture value copied to the clipboard into the task posture panel. |
21 | Joint Move button | This button causes the robot to move to the target joint posture. |
22 | Task Move button | This button causes the robot to move to the target task posture. |
Setting Angle to Move
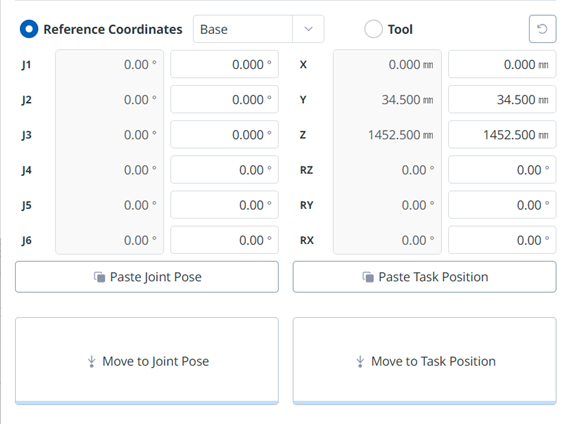
To move the robot at a specific angle, follow these steps:
Select the Move tab.
Enter the target angle of the robot joint. (J4 is disabled for P series models)
Enable the Real Mode.
Tap and hold the Move to Corresponding Joint Pose button to adjust the robot joint angle.
Setting Base Reference Coordinates to Move
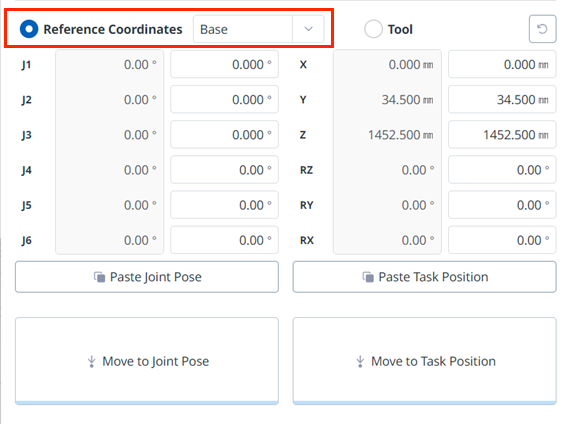
To move the robot based on its base coordinates, follow these steps:
Select the Move tab and Reference Coordinates.
Select the display coordinate as the base.
Tap and hold the Move to Corresponding Task Pose button to move to the set coordinates.
Setting World Coordinates Reference Coordinates to move
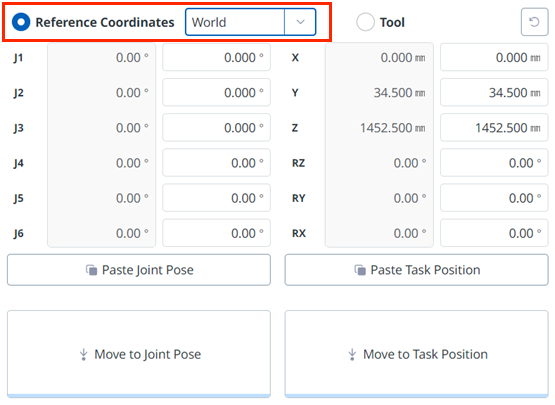
To move the robot based on World Coordinates, follow these steps:
Select the Move tab and Reference Coordinates.
Select World as the display coordinates and select the World tab.
Configure the pose to move with reference to the World Coordinates.
Tap and hold the Move to Corresponding Task Pose button to move to the set coordinates.
Setting Coordinates to Move Based on the Tool
To move the robot based on the tool coordinates, follow these steps:
Select the Move tab and select the Tool tab.
Configure the pose to move with reference to the tool.
Tap and hold the Move to Corresponding Task Pose button to move to the set coordinates.