
Jog Plus Module
The user can select a manual movement method from the Jog tab.
Jog: It moves the robot joint or TCP to the joint axis or coordinate axis the user selected
Move: It moves the robot joint or TCP to the target point the user entered
Robot movement consists of two types.
Joint Motion: It moves each joint linearly with a rotating motion
Task Motion: It moves the end linearly to the target point
The following is the method how to move the robot using joint motion from the jog screen:
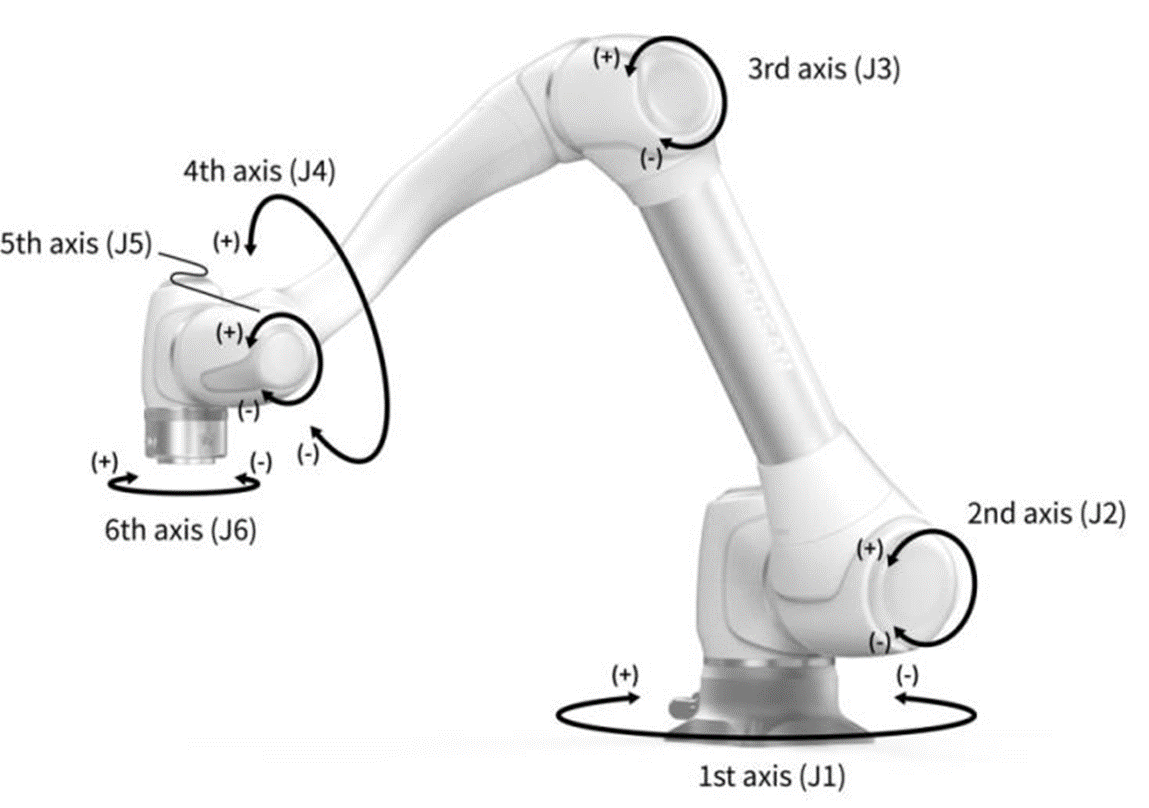
Select the Joint tab.
Select the axis to move. For example, You can select J1.
Press the +/- button to move the robot. The robot moves while the +/- button is pressed, and the current location is displayed on the screen in real-time.
The following is the method how to move the robot using task motion on the jog screen:
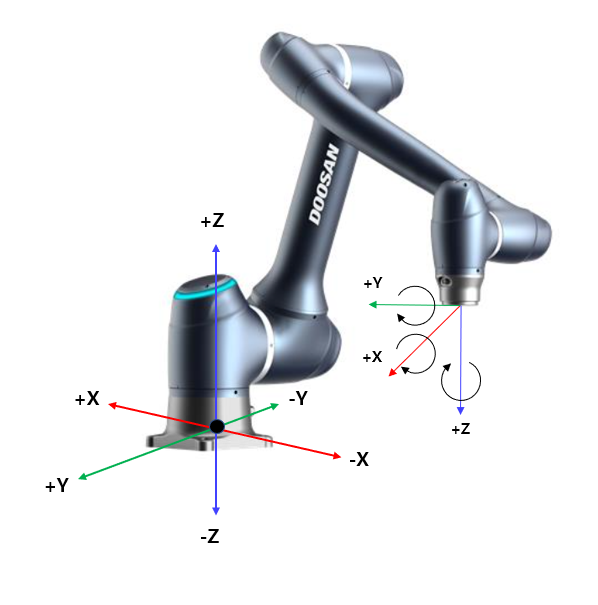
Select the base coordinates. The robot can be moved according to the BASE coordinates or the TOOL coordinates.
Select the direction to move. For example, X-axis can be selected.
Press the +/- button to move the robot. The robot moves while the +/- button is pressed, and the current location is displayed on the screen in real-time.
For more information about jog movement, move and align, refer to Jog Panel, and Move Panel respectively.
Note
If the toggle switch of the actual mode on the top left of the Jog screen is turned off, the robot moves only on the virtual screen on the left of the Jog screen. The actual robot moves if the actual mode toggle switch is turned on.
With the Jog Plus module, the user can explore the entire work space in manual mode or set the Operation Space as the robot operation space. The movement angle of each axis can be limited according to the selected operation space and joint angle limit of the safety setting.
To use the Jog Plus function, tap the Jog Plus Module on the main menu.
The Jog function cannot be used during Servo Off.
The robot is operated manually in the Jog Plus screen, so the robot only moves when the Jog button is pressed.
It is possible to move the robot based on the current position on the Jog Plus tab screen.
The robot can be moved by configuring the target angle/coordinates on the Move tab screen.
It is possible to configure the reference coordinates on the Jog Plus tab screen and Move tab screen as a joint or task.
Note
If the robot cannot be navigated due to being located in a space other than the operation space of the Jog Plus mode, set the robot operation space to “None” to allow the robot to be navigated.
Note
This module is not available in Auto mode. Tapping the toggle button in the bottom right makes it available in Manual mode.
Using Job Plus (Jog+) allows you to use the jog feature simultaneously while performing different work. This can be utilized when manual control is required to move the robot to the target point during teaching.