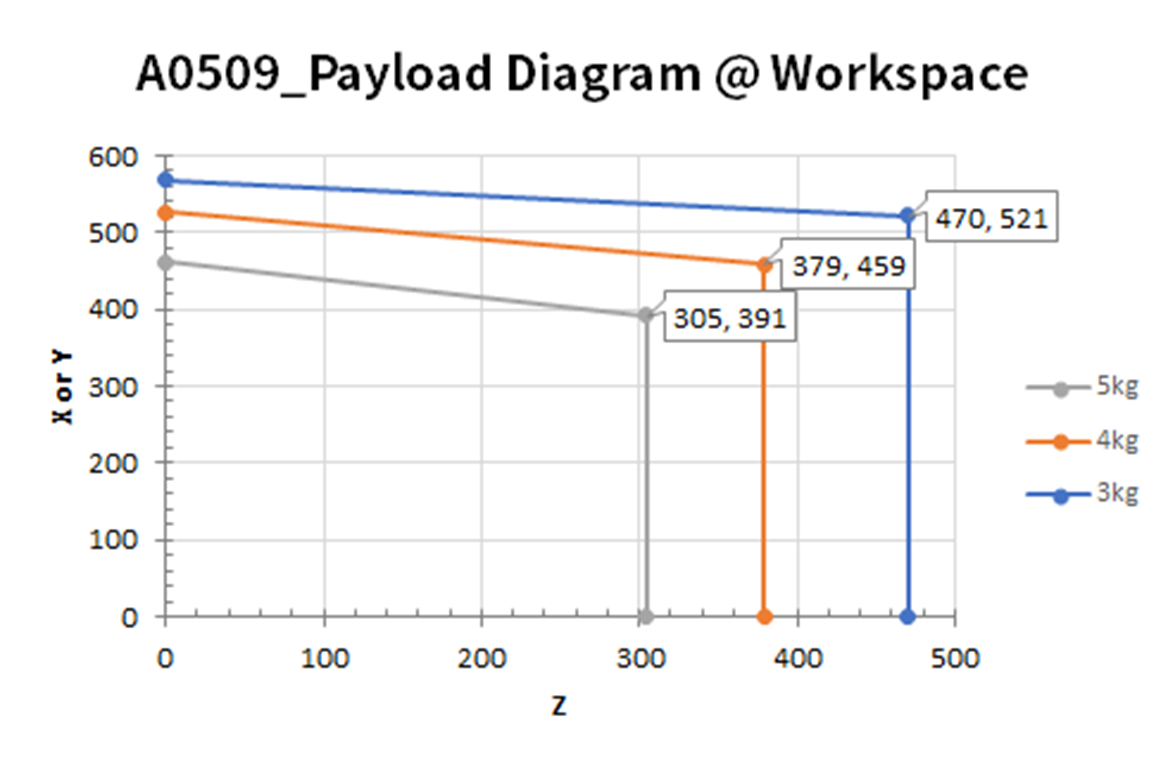
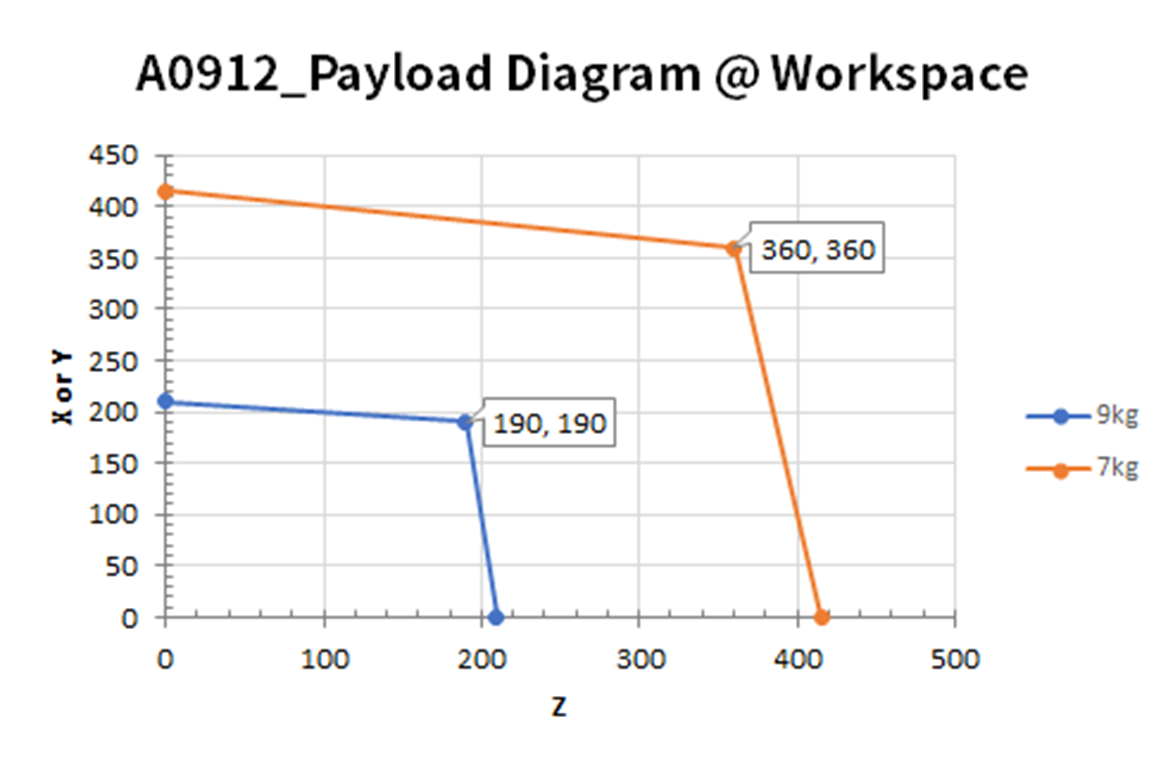
The maximum payload of the robot within its operating space changes according to the distance from the center of gravity. Payload per distance is as follows:
This load diagram assumes a small tool load volume. Tools with a larger volume will have greater limitations in payload above the tool’s center of gravity compared to a tool with an equal weight but smaller volume, and in such cases, vibration may occur.
A0509
A0912
Allowed Moment and Inertia
The allowed moment and inertia for the J4-J6 robot are as follows:
|
Model Name
|
J4 |
J5 |
J6
|
|||
|---|---|---|---|---|---|---|
|
Allowed Moment |
Inertia |
Allowed Moment |
Inertia |
Allowed Moment |
Inertia |
|
|
A0509 |
50 Nm |
0.69 kg㎡ |
50 Nm |
0.69 kg㎡ |
50 Nm |
0.69 kg㎡ |
|
A0912 |
||||||
|
A0509s |
11 Nm |
0.15 kg㎡ |
11 Nm |
0.15 kg㎡ |
11 Nm |
0.15 kg㎡ |
|
A0912s |
||||||