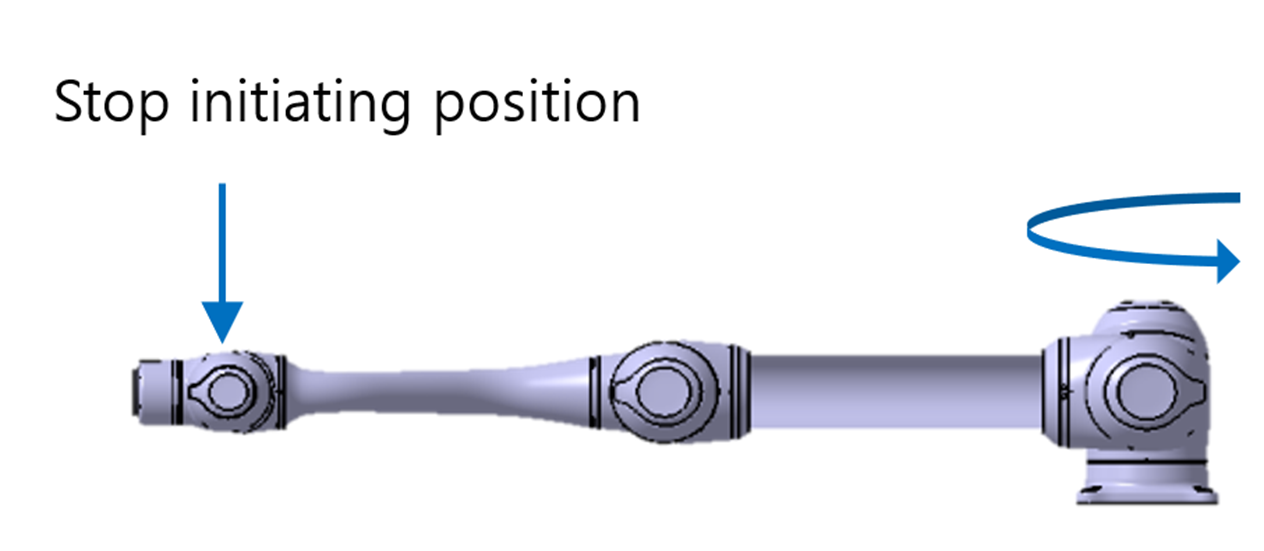
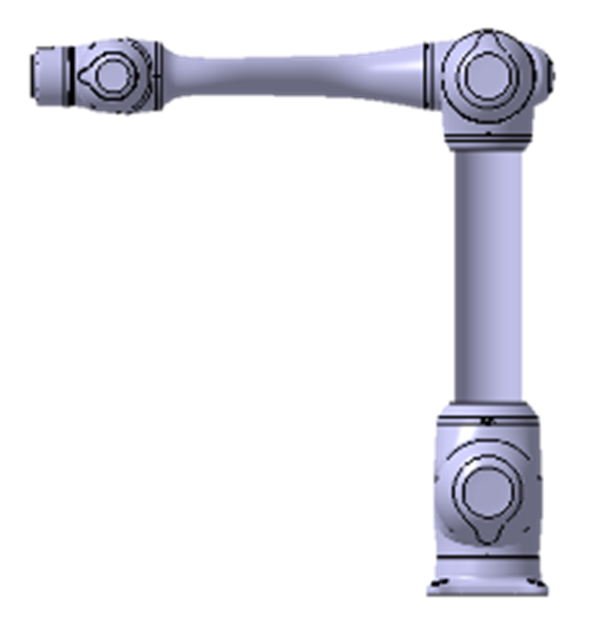
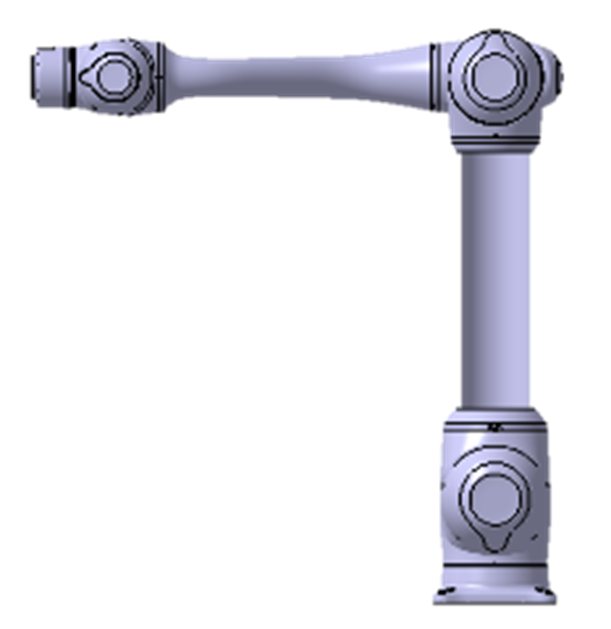
Joint 1 measurement is performed with the rotating axis perpendicular to the ground and during horizontal movement.
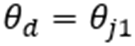
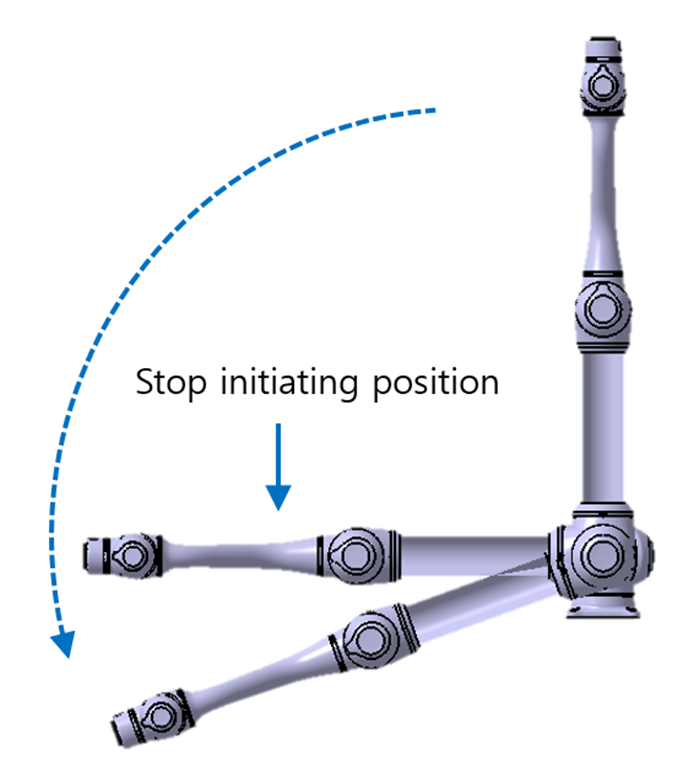
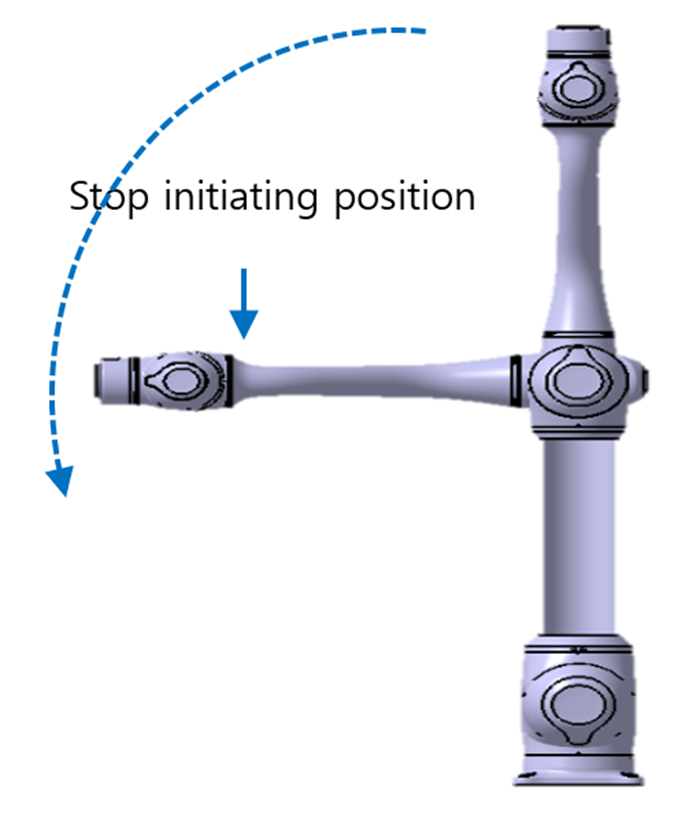
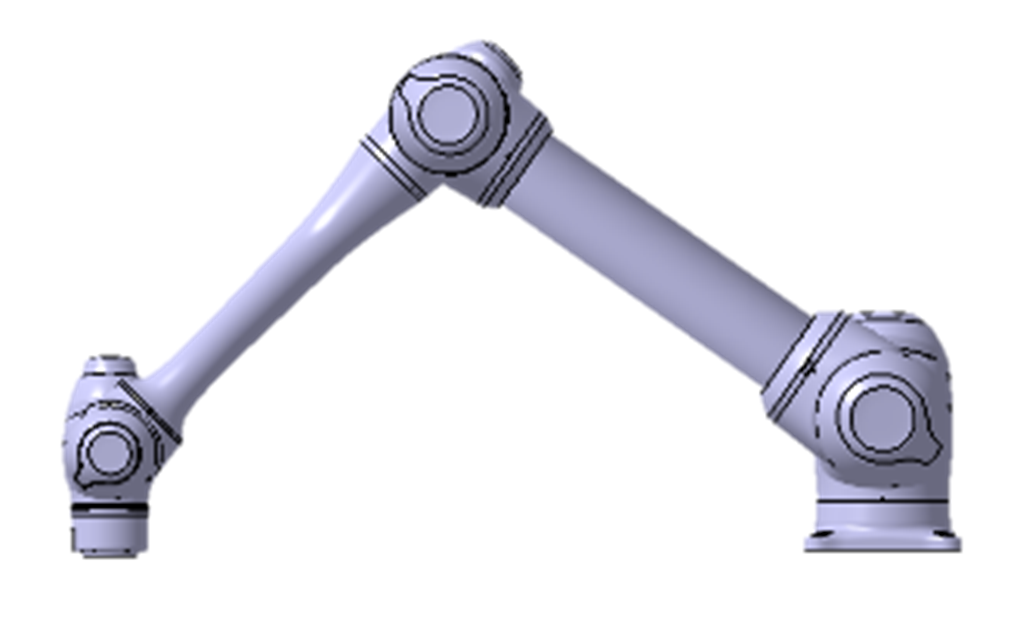
Joint 2 and Joint 3 measurements are performed with the rotating axis parallel to the ground and when the robot is stopped in a downward movement vertical to the ground.
The measurements are the result of the worst case. Measurement may vary according to circumstances
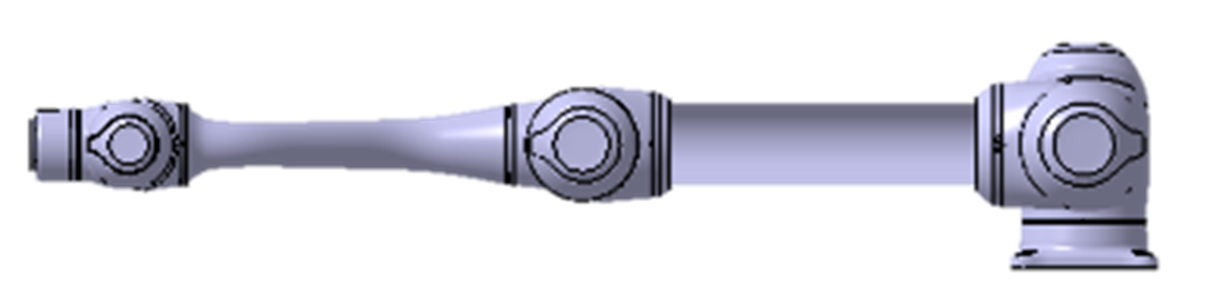
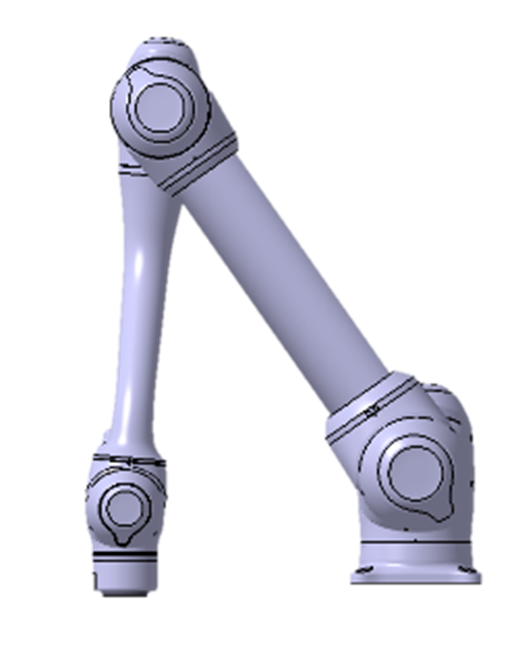
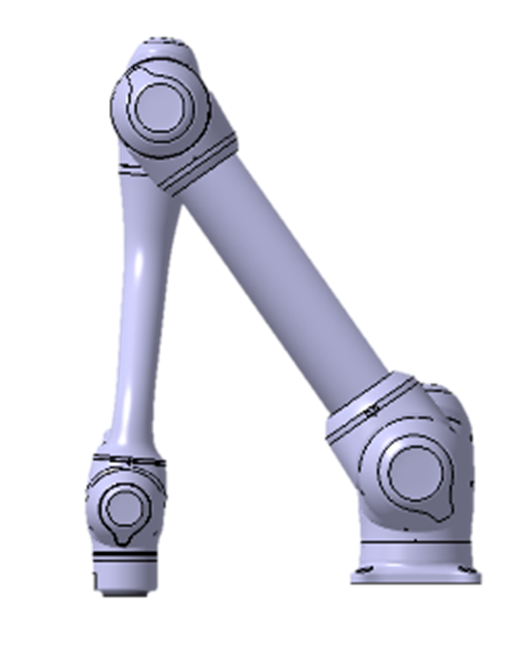
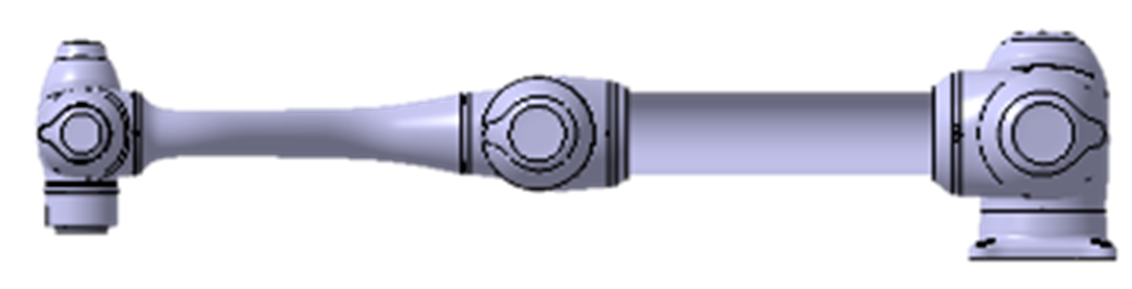
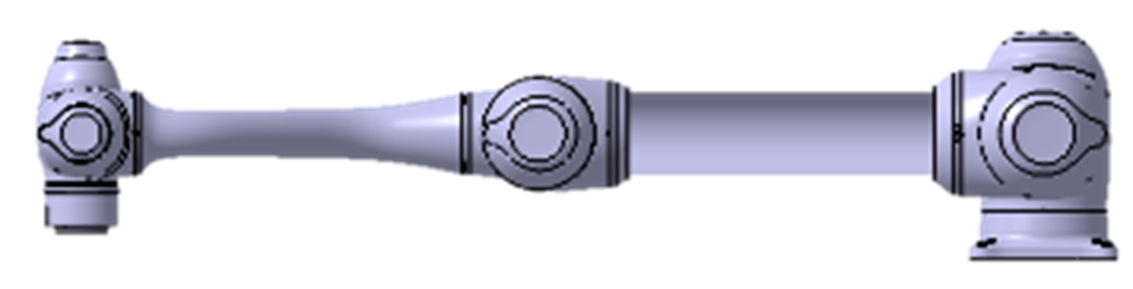
The pose for 33%, 66%, and 100% of extension
|
|
Joint 1 |
Joint 2 |
Joint 3 |
|
100% extension Stop category 0 |
|
|
|
|
33% extension Stop category 1 |
|
|
- |
|
66% extension Stop category 1 |
|
|
- |
|
100% extension Stop category 1 |
|
|
|
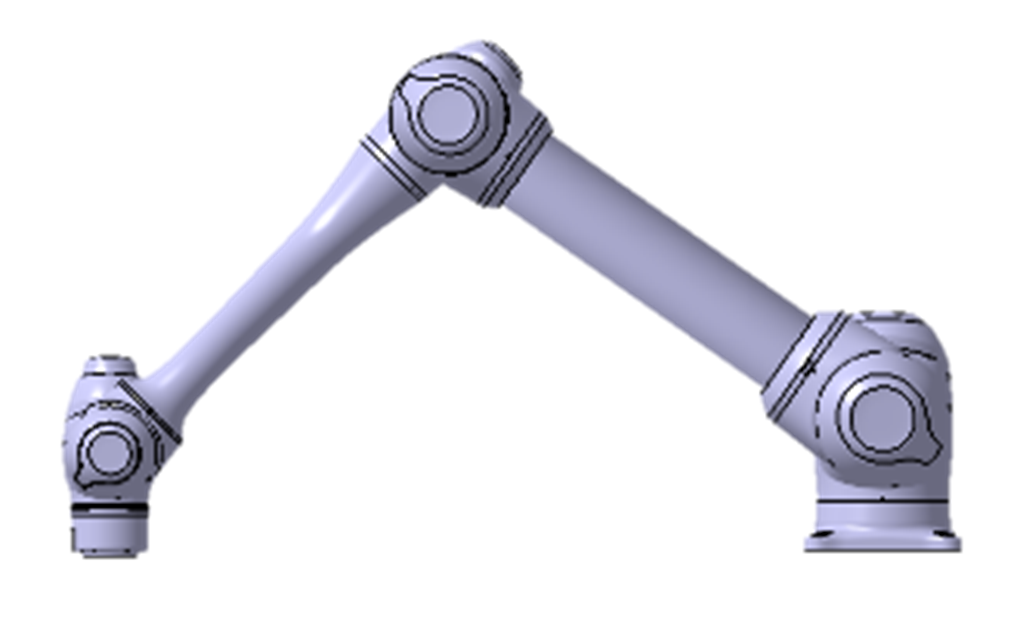
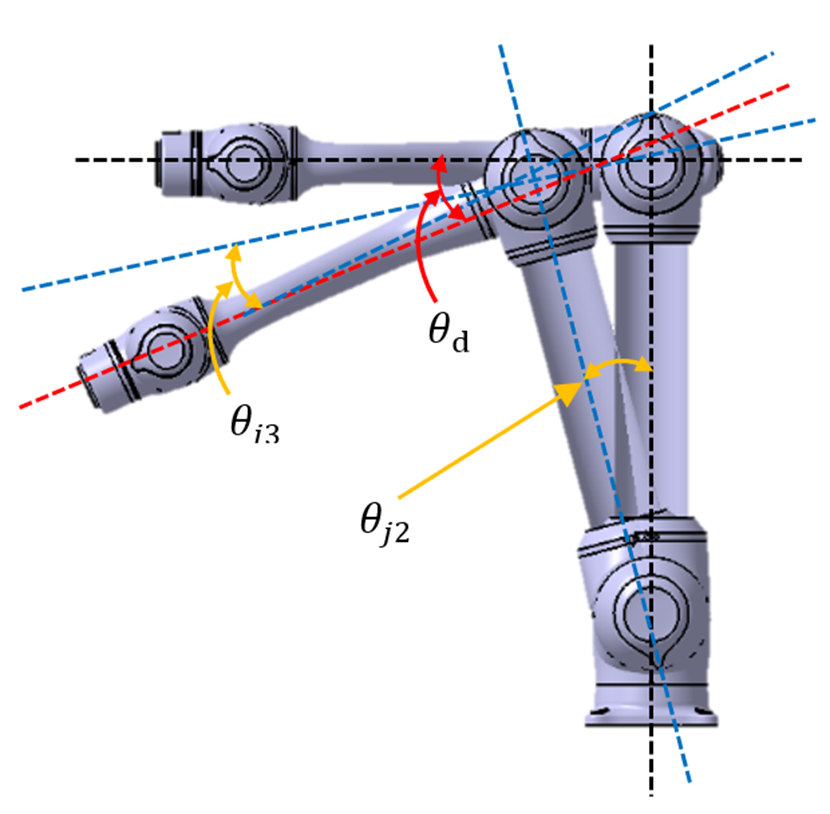
The pose when the stop is initiated and the measured angle (  )
)
|
|
Joint 1 |
Joint 2 |
|
Joint1
|
|
No slip, |
|
Joint2 |
|
|
|
Joint3 |
|
|