
(2.11.2-en_US) svm_get_marker_offset_pose(cpos, offset, euler_mode)
Features
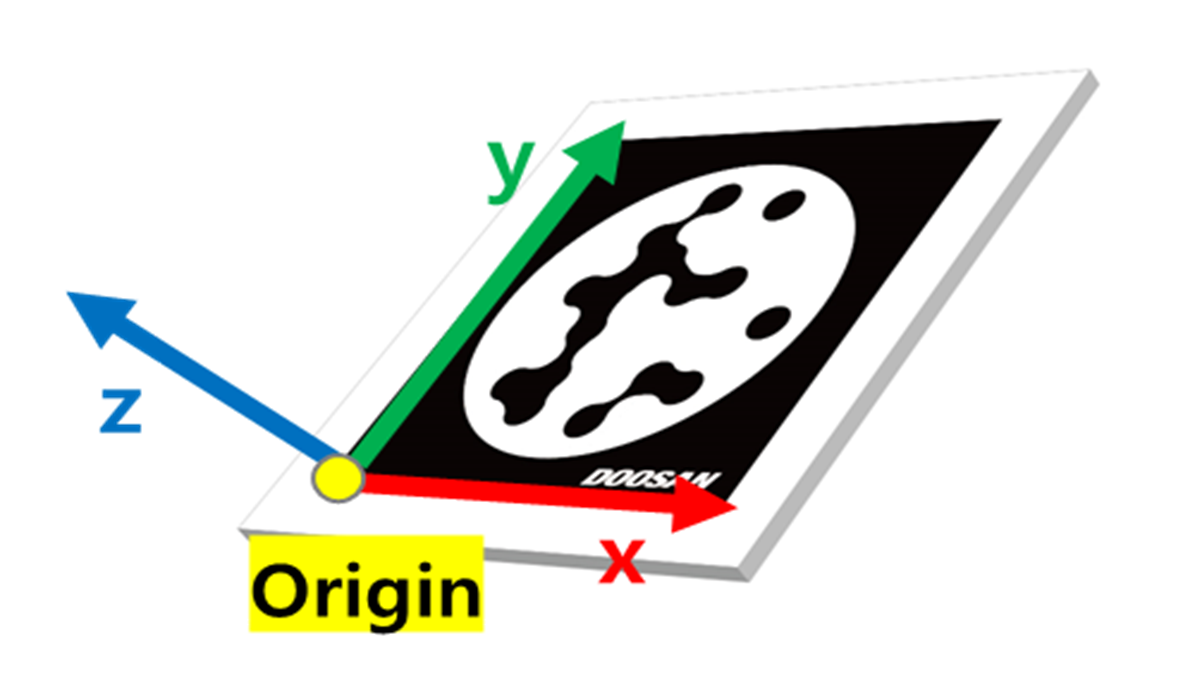
Estimate the landmark pose with respect to Robot coordinate by using offset from the origin of the landmark.
Parameters
| Parameter Name | Data Type | Default Value | Description |
|---|---|---|---|
cpos | § list[Tx, Ty, Tz, Rx, Ry, Rz] | Landmark pose based on camera coordinates | |
offset | list[Tx, Ty, Rz] | Position and angle of rotation away from the landmark origin | |
euler_mode | boolean | Orientation option for Landmark pose with respect to Robot coordinate: ZYZ for “True”, XYZ for “False” |
Return
| Value | Data Type | Description |
|---|---|---|
rpos | list[Tx, Ty, Tz, Rz, Ry, Rz'] or list[Tx, Ty, Tz, Rx, Ry, Rz] | Landmark pose based on robot coordinates or Landmark pose with offset set |
-1 | Int | Fail – no measurement data or input variable error |
Example
PY
svm_connect() # Connect to vision
offset = [10,-20, 45]
euler_mode = True
rpos = svm_get_marker_offset_pose(cpos, offset, euler_mode)
tp_popup("Landmark with respect to Robot={0}".format(rpos))
svm_disconnect() # Disconnect to vision