
(2.11.2-en_US) movej()
Features
The robot moves to the target joint position (pos) from the current joint position.
Parameters
Parameter Name | Data Type | Default Value | Description |
pos | posj | - | posj or joint angle list |
list (float[6]) | |||
vel (v) | float | None | velocity (same to all axes) or velocity (to an axis) |
list (float[6]) | None | ||
acc (a) | float | None | acceleration (same to all axes) or acceleration (acceleration to an axis) |
list (float[6]) | None | ||
time (t) | float | None | Reach time [sec] |
radius (r) | float | None | Radius for blending |
mod | int | DR_MV_MOD_ABS | Movement basis
|
ra | int | DR_MV_RA_DUPLICATE | Reactive motion mode
|
Note
- Abbreviated parameter names are supported. (v:vel, a:acc, t:time, r:radius)
- _global_velj is applied if vel is None. (The initial value of _global_velj is 0.0 and can be set by set_velj.)
- _global_accj is applied if acc is None. (The initial value of _global_accj is 0.0 and can be set by set_accj.)
- If the time is specified, values are processed based on time, ignoring vel and acc.
- If the time is None, it is set to 0.
- If the radius is None, it is set to the blending radius in the blending section and 0 otherwise.
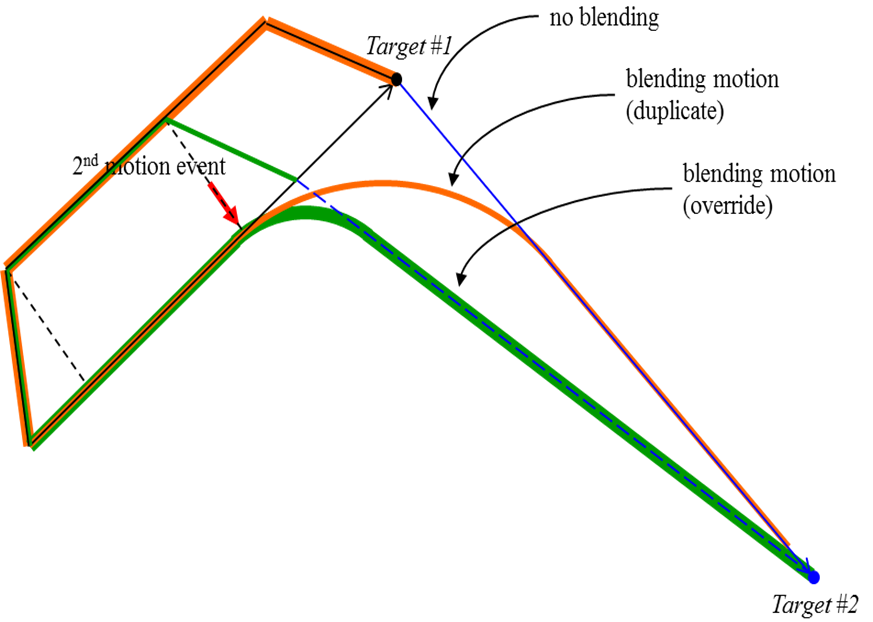
- If a new motion (following motion) is executed before the motion being executed (previous motion) is completed, the previous motion and the following motion are smoothly connected (Motion Blending). It is possible to set the option ra, which can determine whether to maintain or cancel the target of the previous motion, for the following motion. (Maintain: ra=DR_MV_RA_DUPLICATE / Cancel: ra=DR_MV_RA_OVERRIDE) For example, in the figure below, if the following motion is executed at the “2nd motion event” point of a previous motion with the target, “Target#1,” and if the option ra=DR_MV_RA_DUPLICATE is set for the following motion, the motion will follow the orange trajectory, as the motion maintains the target of the previous motion, and if option ra=DR_MV_RA_OVERRIDE is set for the following motion, the motion will follow the green trajectory, as it cancels the target of the previous motion.
Caution
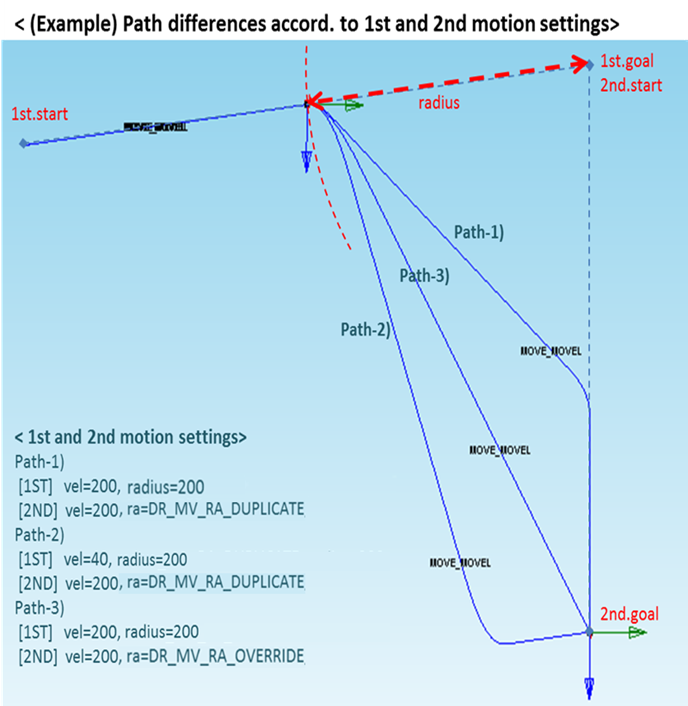
If the following motion is blended with the conditions of ra=DR_MV_RA_DUPLICATE and radius>0, the preceding motion can be terminated when the following motion is terminated while the remaining motion time determined by the remaining distance, velocity, and acceleration of the preceding motion is greater than the motion time of the following motion. Refer to the following image for more information.
- In versions below SW V2.8, if the blending radius exceeds 1/2 of the total moving distance, the motion is not operated because it affects the motion after blending, and the running task program is terminated when a blending error occurs
- In SW V2.8 or later, if the blending radius exceeds 1/2 of the total moving distance, the blending radius size is automatically changed to 1/2 of the total moving distance, and the change history can be checked in the information log message.
Return
| Value | Description |
|---|---|
0 | Success |
Negative value | Failed |
Exception
| Exception | Description |
|---|---|
DR_Error (DR_ERROR_TYPE) | Parameter data type error occurred |
DR_Error (DR_ERROR_VALUE) | Parameter value is invalid |
DR_Error (DR_ERROR_RUNTIME) | C extension module error occurred |
DR_Error (DR_ERROR_STOP) | Program terminated forcefully |
Example
Q1 = posj(0,0,90,0,90,0)
Q2 = posj(0,0,0,0,90,0)
movej(Q1, vel=10, acc=20)
# Moves to the Q1 joint angle at the velocity of 10(deg/sec) and acceleration of 20(deg/sec2).
movej(Q2, time=5)
# Moves to the Q2 joint angle with a reach time of 5 sec.
movej(Q1, v=30, a=60, r=200)
# Moves to the Q1 joint angle and is set to execute the next motion
# when the distance from the Q1 space position is 200mm.
movej(Q2, v=30, a=60, ra= DR_MV_RA_OVERRIDE)
# Immediately terminates the last motion and blends it to move to the Q2 joint angle.Related commands
- (2.11.2-en_US) posj(J1=0, J2=0, J3=0, J4=0, J5=0, J6=0)
- (2.11.2-en_US) set_velj(vel)
- (2.11.2-en_US) set_accj(acc)
- (2.11.2-en_US) amovej()