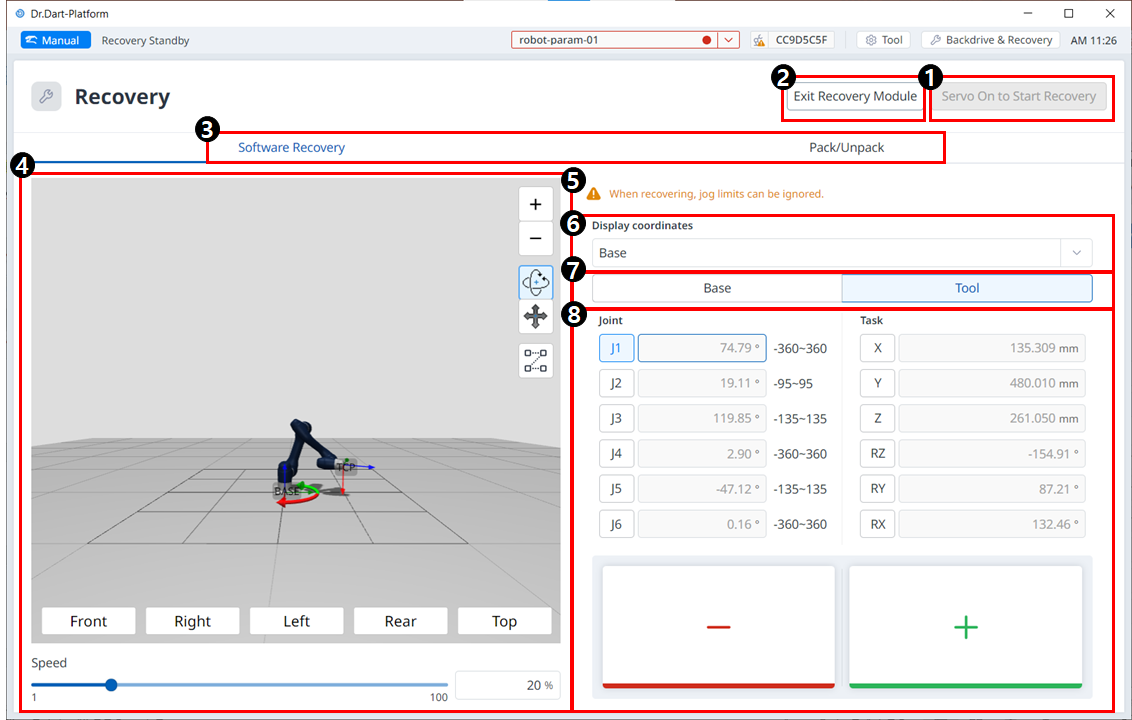
Servo ON (Servo ein), um die Wiederherstellung zu starten
Mit dieser Taste wird der Servo vor dem Wechsel in den Wiederherstellungsmodus aktiviert.
2
Beenden Sie Die Wiederherstellung
Mit dieser Schaltfläche können Sie das Wiederherstellungsmodul beenden.
3
Kopfzeile
In diesem Abschnitt können Sie den Software-Wiederherstellungsmodus oder den Pack/Unpack-Modus auswählen.
4
3D-Simulation
In diesem Bereich können Sie eine Voranzeige einer 3D-Simulation der festgelegten Werte anzeigen.
5
Warnmeldung
Dies erklärt die Vorsichtsmaßnahmen.
6
Koordinaten Anzeigen
Hier können Sie die Koordinate basierend auf Basis oder Welt festlegen.
7
Basis-/Werkzeugschaltfläche
Hier können Sie den Wert basierend auf Basis oder Werkzeug festlegen.
8
Gelenk/Aufgabe
In diesem Abschnitt können Sie die gewünschten Werte eingeben, um den Roboter zu bewegen.
Gehen Sie wie folgt vor, um den Software-Wiederherstellungsmodus zu verwenden:
Tippen Sie aufdas Menü Recovery(Wiederherstellung) im Fenster Main Menu(Hauptmenü).DerBildschirm Software Recovery (Software-Wiederherstellung) wird automatisch im Fenster Recovery(Wiederherstellung) angezeigt.
Tippen Sie auf die einzelnen Verbindungsschaltflächen auf der rechten Seite des Bildschirms Software Recovery (Software-Wiederherstellung), und verwenden Sie, , um die Position festzulegen.Oder drücken Tasten des Cockpits zur Einstellung des Gelenkwinkels durch direktes Teach-in.
Definitionen der Tasten im Cockpit finden Sie unter Cockpit
Änderungen an der Einstellung werden im Simulationsfenster auf der linken Seite in Echtzeit widergespiegelt.
Wenn die Einstellung abgeschlossen ist, tippen Sie auf die Schaltfläche X oben links, um das Fenster zu schließen.
Vorsicht
Der Reparaturmodus der Software ist nicht verfügbar, wenn die Winkelgrenze der Verbindung um 3 Grad überschritten wird.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.