Sicherheits-E/A-Einstellung
Diese Funktion gibt sicherheitsrelevante Signale über eine redundante Klemme ein bzw. aus. Wenn ein Signal erkannt wird , das sich vom redundanten Sicherheitseingang oder -Ausgangssignal unterscheidet, ermittelt das System, ob es sich um einen Kurzschluss oder einen Hardwarefehler handelt, und stoppt den Roboter im STO-Stoppmodus.
- Safety Signal I/O) kann unter Robot Parameters > Safety Settings > Safety I/O (Roboterparameter > Sicherheitseinstellungen > Sicherheits-I/O) eingestelltwerden.
Weitere Informationen finden Sie unter Sicherheitssignal E/A .
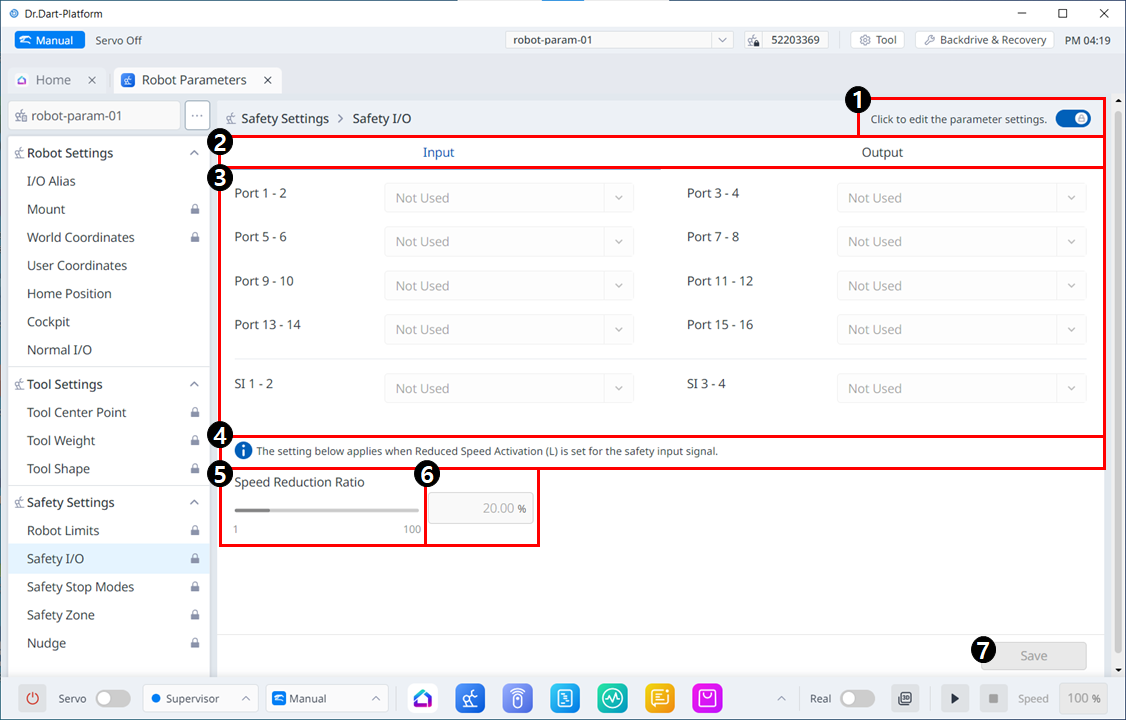
Menüoptionen
| Artikel | Beschreibung | |
|---|---|---|
| 1 | Sperrschaltfläche | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
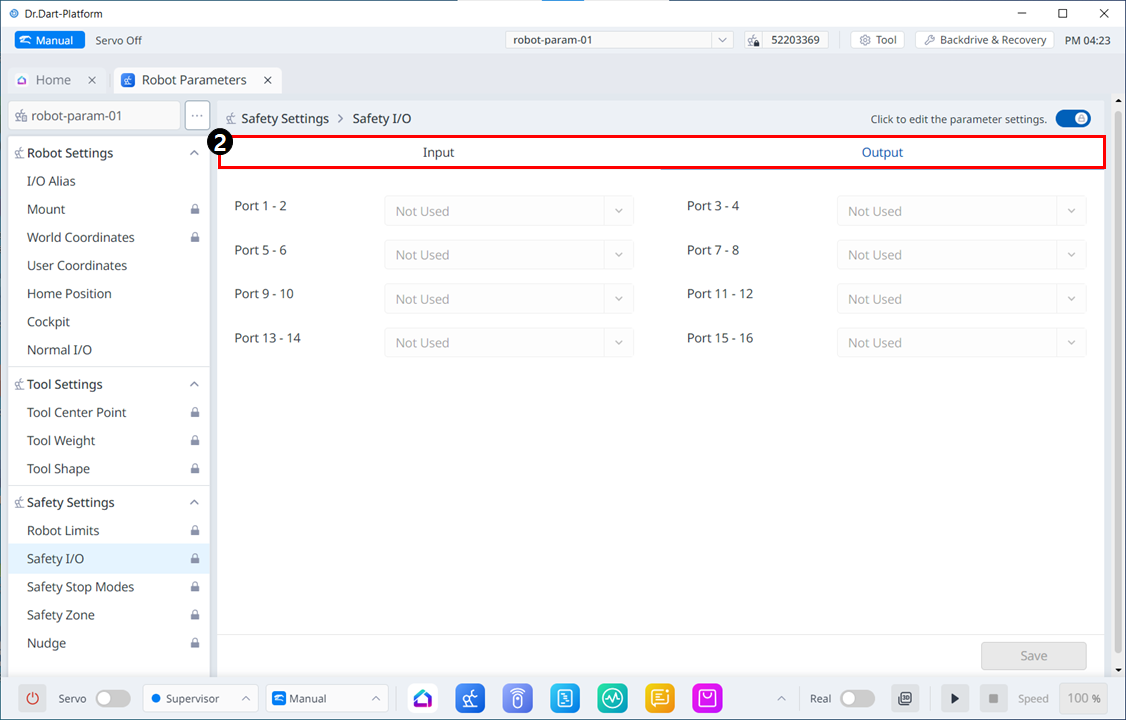
| 2 | Eingang/Ausgang | Es kann entweder ein-/Ausgang ausgewählt werden. |
| 3 | Portliste | Dies ist eine Liste der Ports in der entsprechenden Kategorie. Die Dropdown-Menüs umfassen: Nicht verwendet |
| 4 | Warnmeldung | Ein Warnhinweis zum Einrichten der Sicherheits-E/A |
| 5 | Schieberegler Für Geschwindigkeitsreduzierung | Mit dem Schieberegler können Sie das Geschwindigkeitsreduzierungsverhältnis einstellen. |
| 6 | Eingabe Geschwindigkeitsreduzierungsrate | Die Geschwindigkeitsreduzierungsrate kann direkt eingegeben werden. Er kann auf einen Wert zwischen 0 und 100 % eingestellt werden. |
| 7 | Speichern | Mit dieser Schaltfläche können Sie die eingegebene Einstellung speichern. |
Der Ausgabebildschirm wird wie folgt angezeigt, ähnlich dem Eingabebildschirm.