
Einstellung der Robotergrenzen
In Robotergrenzen können verschiedene Grenzwerte für den Roboter festgelegt werden. Diese Grenzwerte werden verwendet, um sicherzustellen, dass der Roboter innerhalb der festgelegten Grenzwerte sicher funktioniert.
Robotergrenzen können unter Roboterparameter > Sicherheitseinstellungen > Robotergrenzen festgelegtwerden.
- Eine ausführliche Beschreibung der einzelnen Grenzwerte finden Sie unter Roboterbegrenzungen .
Die Grenzwerte für Roboter sind weitgehend in 3 Kategorien unterteilt. Jede Kategorie umfasst die folgenden Bildschirme und Funktionen.
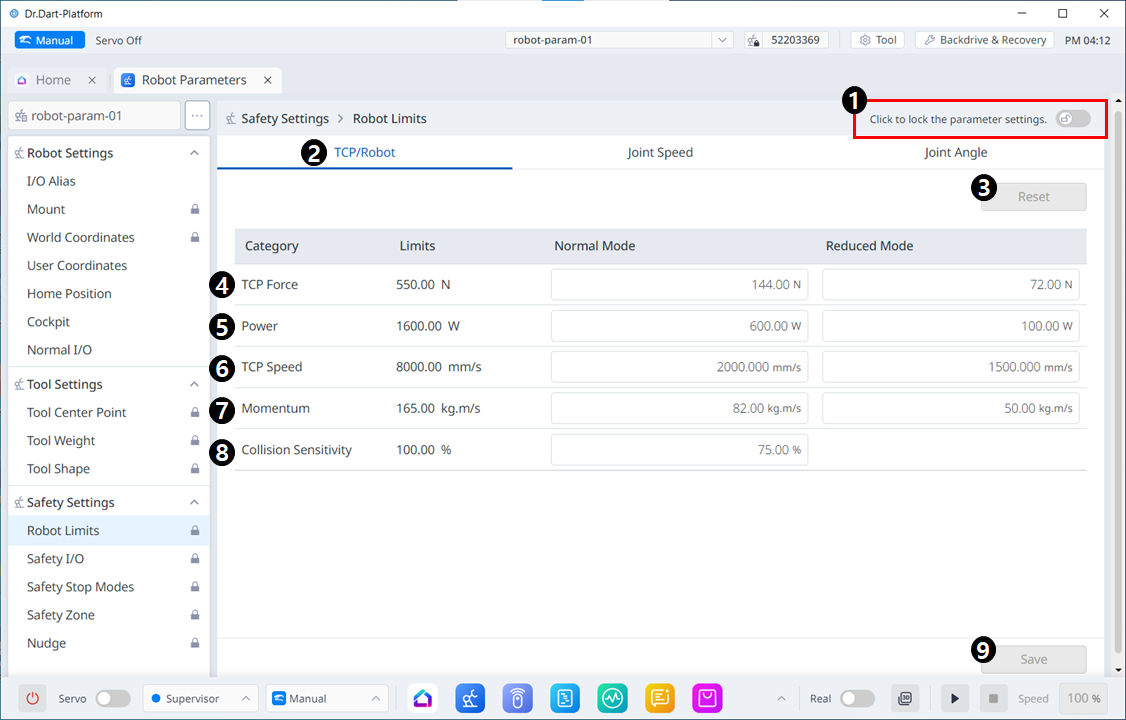
Menüoptionen
| Artikel | Beschreibung | |
|---|---|---|
| 1 | Sperrschaltfläche | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | TCP/Roboter | Große Klassifizierung der Robotergrenzen. |
| 3 | Zurücksetzen | Wird zum Zurücksetzen der Einstellungen verwendet. |
| 4 | Erzwingen | Wird zum Einstellen der Kraft verwendet. |
| 5 | Macht | Wird zum Einstellen der Leistung verwendet. |
| 6 | Geschwindigkeit | Wird zum Einstellen der Geschwindigkeit verwendet. |
| 7 | Schwung | Wird verwendet, um den Schwung zu setzen. |
| 8 | Kollision | Dient zum Festlegen der Kollision. |
| 9 | Speichern | Wird zum Speichern der entsprechenden Einstellung verwendet. |
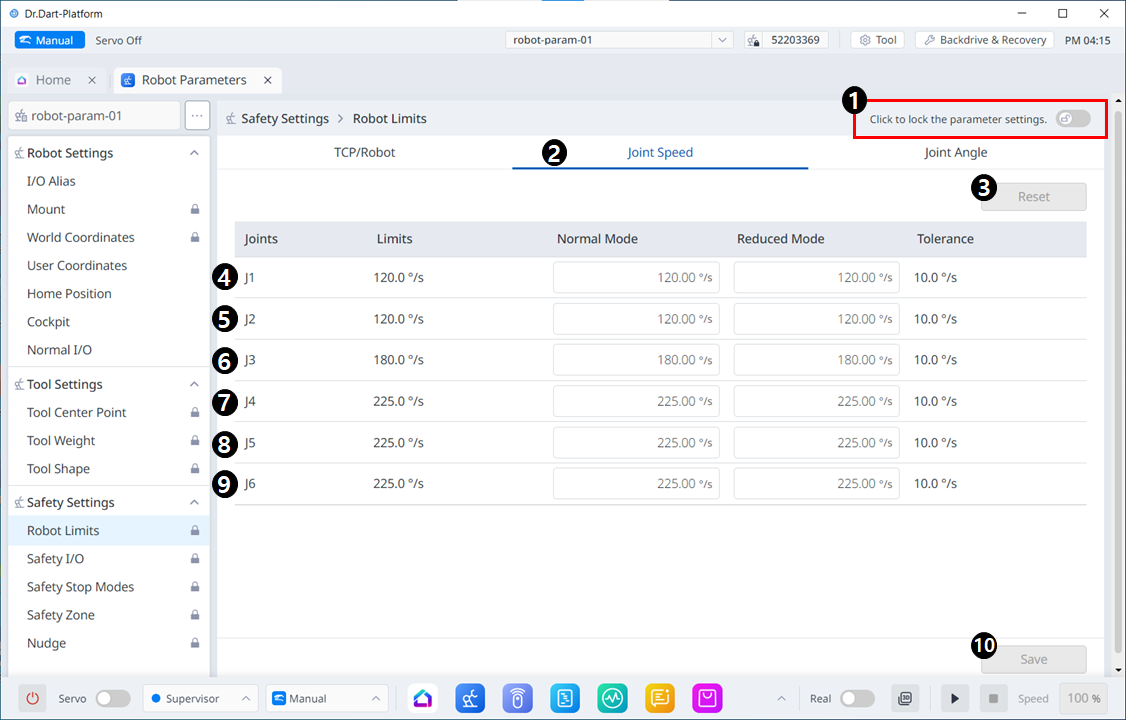
Menüoptionen
| Artikel | Beschreibung | |
|---|---|---|
| 1 | Sperrschaltfläche | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Verbindungsgeschwindigkeit | Große Klassifizierung der Robotergrenzen. |
| 3 | Zurücksetzen | Wird zum Zurücksetzen der Einstellungen verwendet. |
| 4 | J1 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 5 | J2 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 6 | J3 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 7 | J4 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 8 | J5 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 9 | J6 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 10 | Speichern | Wird zum Speichern der entsprechenden Einstellung verwendet. |
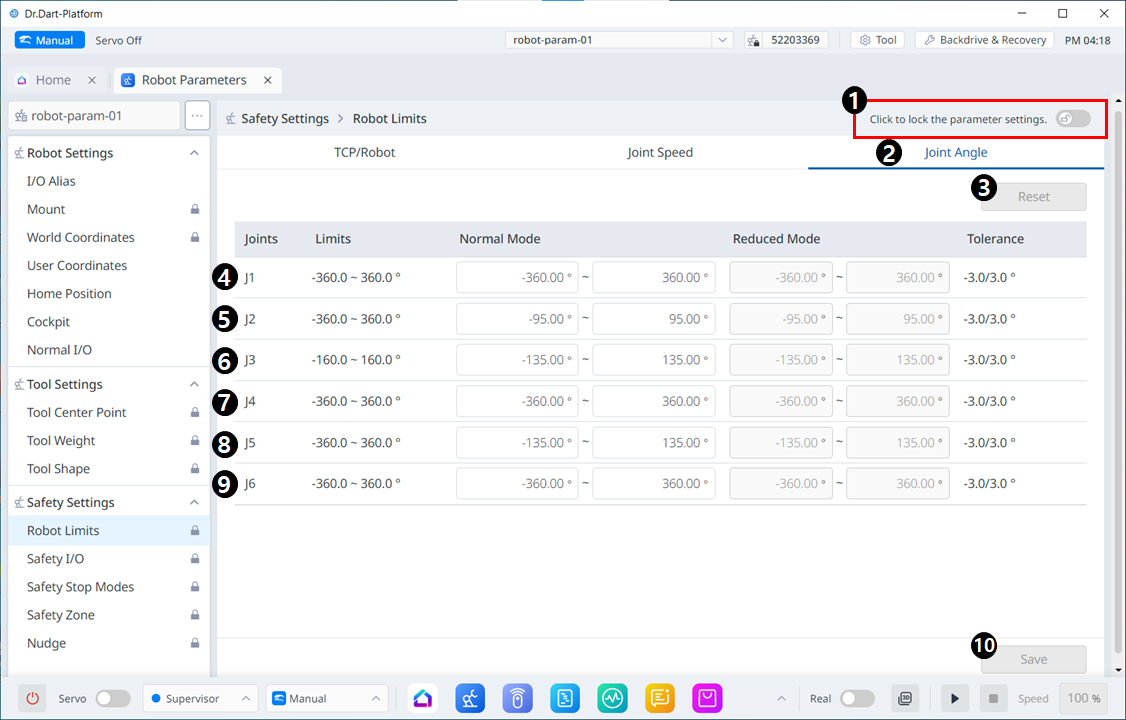
Menüoptionen
| Artikel | Beschreibung | |
|---|---|---|
| 1 | Sperrschaltfläche | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Verbindungswinkel | Große Klassifizierung der Robotergrenzen. |
| 3 | Zurücksetzen | Wird zum Zurücksetzen der Einstellungen verwendet. |
| 4 | J1 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 5 | J2 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 6 | J3 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 7 | J4 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 8 | J5 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 9 | J6 | Dient zum Festlegen der Einstellungen für den normalen bzw. reduzierten Modus. |
| 10 | Speichern | Wird zum Speichern der entsprechenden Einstellung verwendet. |