Einstellung der Sicherheitsstoppmodi
OBLIGATORISCH GANZ RUHIG 5 MIN
Lernen Sie die Arten von Sicherheitsanschlägen und wie Sie Sicherheitsanschläge aktivieren/deaktivieren.
Arten von Sicherheitsanschlägen
Die folgenden Stoppmodi sorgen für die Sicherheit des Benutzers:
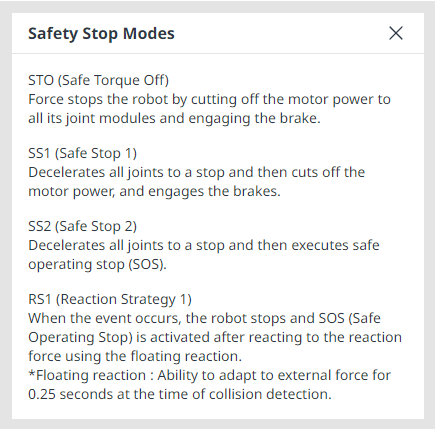
- STO (Safe Torque Off): Stoppt Servo aus (Motorleistung wird sofort ausgeschaltet)
- SS1 Uhr (Safe Stop 1): Servo aus nach maximalem Verzögerungsstopp
- SS2 Uhr (Safe Stop 2): Standby nach Stopp der maximalen Verzögerung (Pause)
- RS1: Bei einer Kollision bewegt es sich in die entgegengesetzte Richtung der Kollision und wechselt dann in den Standby-Modus (kann nur in Kollisionserkennung/Verletzung des TCP-Kraftgrenzwerts eingestellt werden)
Doosan Robotics Roboter verfügen über zwei Arten von Not-aus-Funktionen. Not-aus wird für allgemeine Notfallsituationen verwendet, und der Roboter kann den Betrieb mit eingeschaltetem Servo wieder aufnehmen, nachdem er den Not-aus-Schalter losgelassen hat. Im Falle eines Not-aus kann der Roboter den Betrieb wieder aufnehmen, indem die Ursache des Not-aus behoben und der Stopp losgelassen wird.
- Not-Aus: Sie stellt den Stopp-Modus ein, wenn der Notausschalter des Programmierhandgeräts oder ein zusätzlich installiertes externes Gerät aktiviert wird
- Sie wird aktiviert, wenn der Not-aus-Schalter am Programmierhandgerät oder der mit dem TBSFT EM-Terminal verbundene Schalter gedrückt wird.
- Es können nur STO oder SS1 ausgewählt werden.
- Not-Aus: Sie stellt den Stopp-Modus ein, wenn die extern angeschlossene Schutzausrüstung aktiviert ist
- Sie wird aktiviert, wenn die am TBSFT PR-Terminal angeschlossene Schutzausrüstung aktiviert wird.
Weitere Informationen zu den Not-aus-Funktionen finden Sie Sicherheitsfunktionunter .
Aktivieren/Deaktivieren des Not-aus-Schalters
Drücken Sie den Not-aus-Schalter am Programmierhandgerät, oder aktivieren Sie die Sicherheitsvorrichtung, die mit dem Sicherheits-E/A verbunden ist, um den Not-aus-Schalter zu aktivieren. Sicherheitsvorrichtungen können über die Funktionen „Workcell Manager“ > „Robot“ > „Safety I/O“ des Bildschirms des Programmierhandgeräts an den Not-aus- oder Not-aus-Schalter angeschlossen werden.
- Weitere Informationen zum Anschließen einer Sicherheitsvorrichtung an Sicherheits-E/A finden Sie unter Verbinden von Controller-E/A.
- Informationen zum Einstellen der Sicherheitsabschaltung für diese Verbindung im Programm finden Sie unter Sicherheitssignal E/A.
Menüoptionen
| Artikel | Beschreibung | |
|---|---|---|
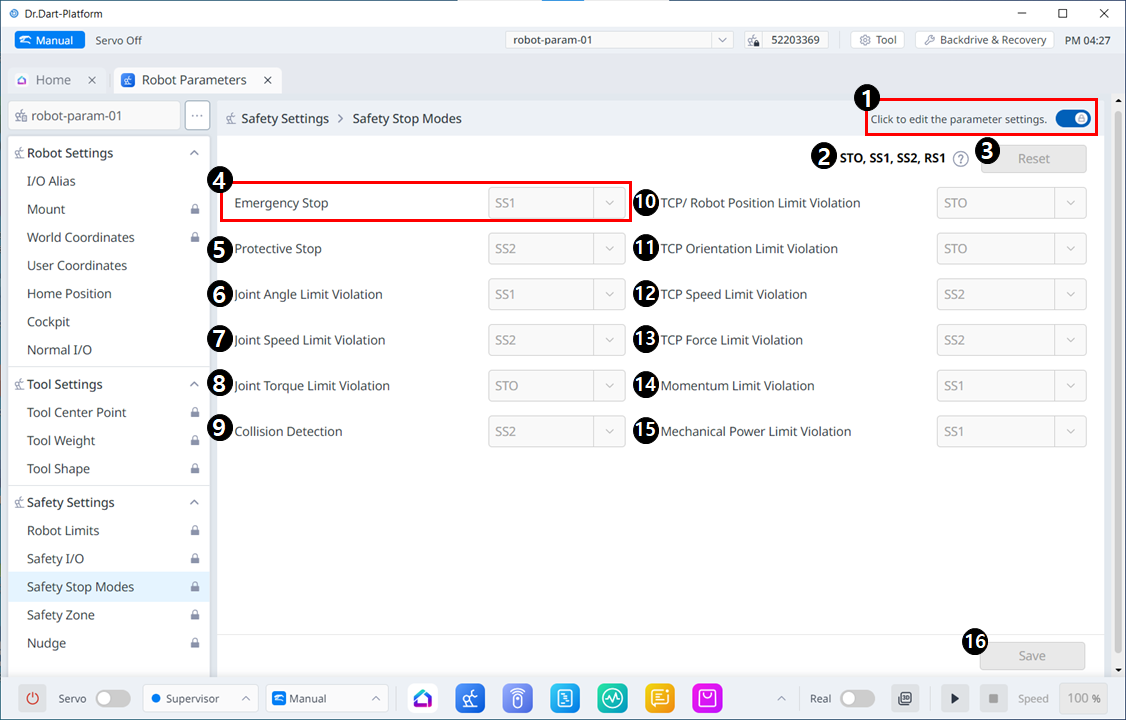
| 1 | Sperrschaltfläche | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Informationsmeldung | Eine Meldung mit den für die Einstellung erforderlichen Informationen. |
| 3 | Zurücksetzen | Eine Taste zum Zurücksetzen der Einstellungen. |
| 4 | Not-Aus | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 |
| 5 | Not-Aus | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: SS1 SS2 |
| 6 | Verletzung Der Begrenzung Des Verbindungswinkels | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 7 | Verletzung Der Gemeinsamen Geschwindigkeitsbegrenzung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 8 | Verletzung Der Drehmomentgrenze | STO만 가능합니다. |
| 9 | Kollisionsprüfung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 RS1 |
| 10 | Verletzung der Positionsgrenze des TCP-Roboters | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 11 | Verletzung des Grenzwerts für die TCP-Ausrichtung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 12 | TCP-Geschwindigkeitslimit verletzt | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 13 | TCP-Grenzwert verletzt | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 14 | Überschreitung Der Momentum-Grenze | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 15 | Mechanische Grenzverletzung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 16 | Speichern | Mit dieser Schaltfläche können Sie die Einstellungswerte speichern. |
In der Informationsmeldung erscheint das folgende Popup: