
Namen und Funktionen
Manipulator
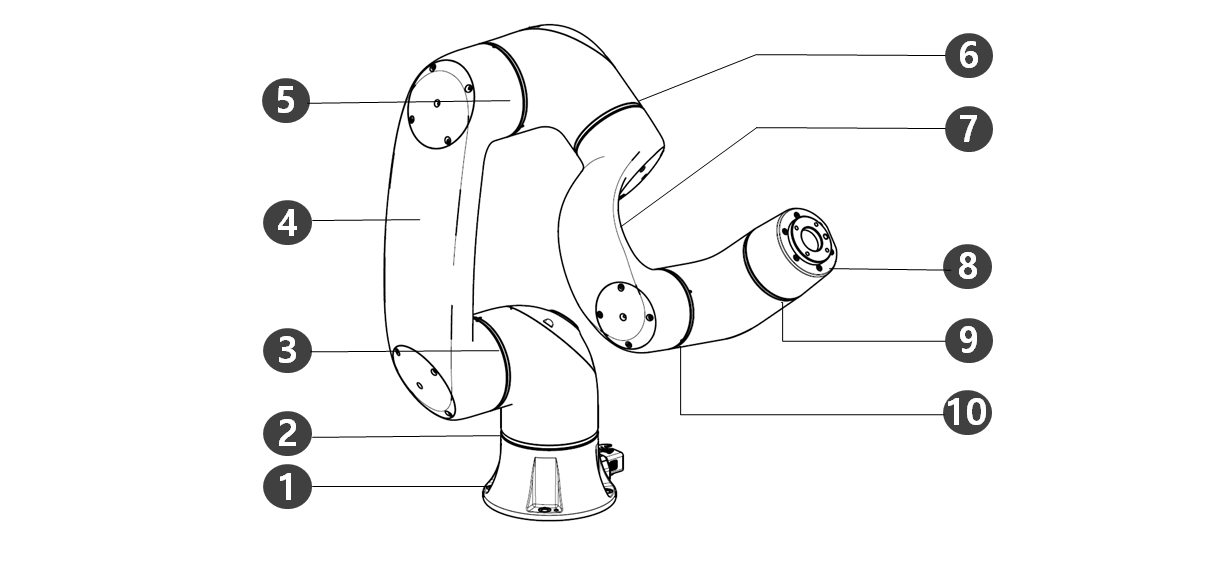
Namen von Teilen
Nein | Name | Nein | Name |
|---|---|---|---|
1 | Basis | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Werkzeugflansch |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
Hauptfunktionen
Nein | Artikel | Beschreibung |
|---|---|---|
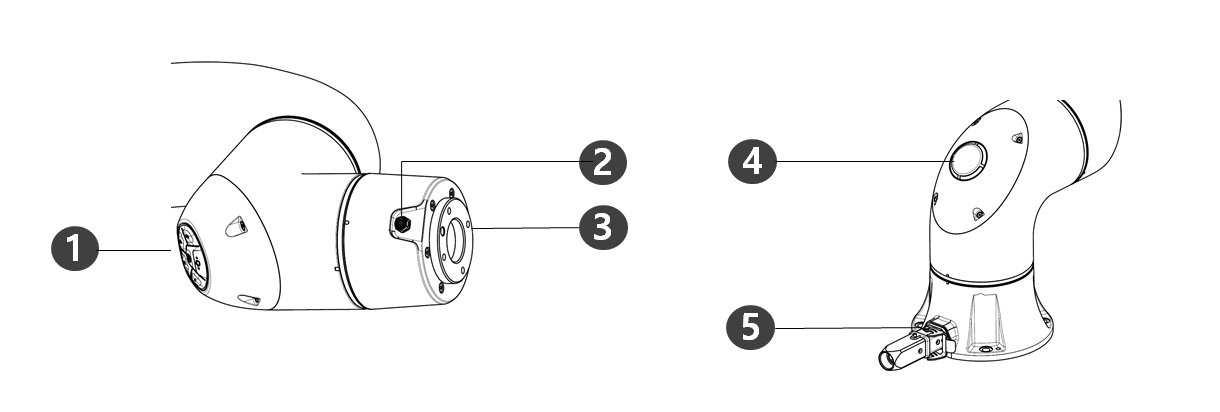
1 | Cockpit | [Option] Steuerung wird für direkte Programmierung verwendet. |
2 | Flansch-E/A | E/A-Anschluss für Werkzeugsteuerung. |
3 | Werkzeugflansch | Bereich für die Montage der Werkzeuge. |
4 | LED | Zeigt den Roboterstatus in verschiedenen Farben an. Weitere Informationen zum Roboterstatus finden Sie im Abschnitt „ Status und Flansch-LED-Farbe für jeden Modus“. |
5 | Steckverbinder | Wird für die Stromversorgung und Kommunikation des Roboters verwendet. |
Steuerung
Nein | Artikel | Beschreibung |
|---|---|---|
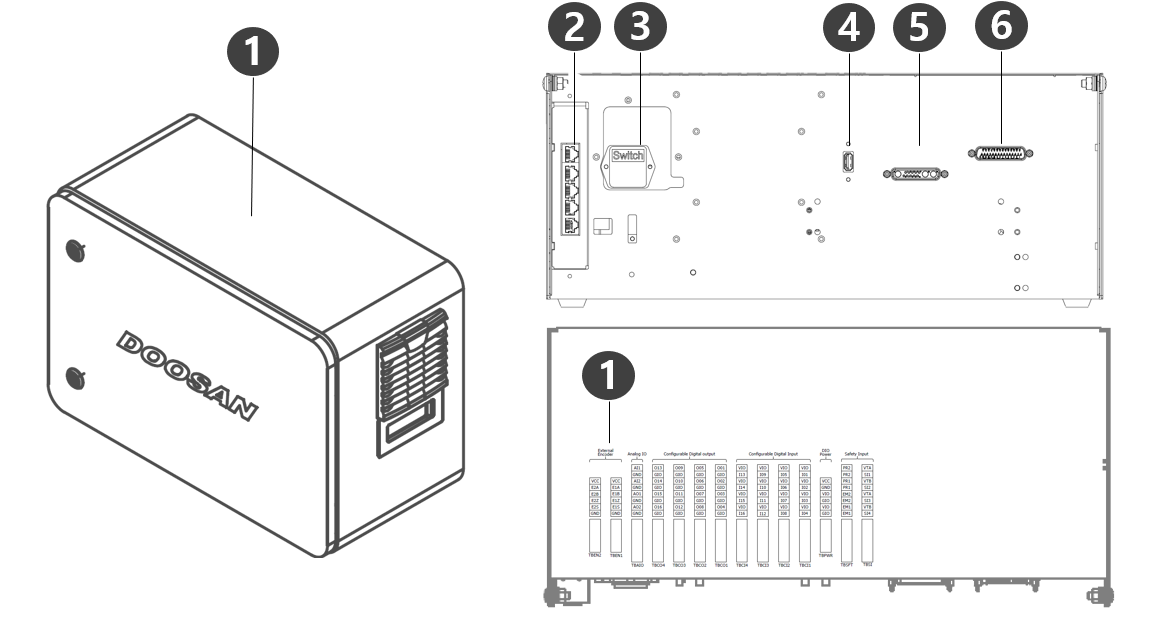
1 | E/A-Anschlussklemme (intern) | Es kann mit Controllern oder Peripheriegeräten anderer Roboter verbunden werden. |
| 2 | Netzwerkverbindungsklemme | Wird für die Verbindung mit dem Netzwerkverbindungsterminal im Controller verwendet, um Laptops, TCP/IP-Geräte und Modbus-Geräte zu verwenden. |
| 3 | Anschluss/Schalter für Stromanschluss | Wird zum Anschließen der Stromversorgung des Controllers zum ein- oder Ausschalten verwendet. Weitere Informationen finden Sie Schalten Sie das System ein/ausunter . |
| 4 | USB-Anschluss | Dient zum Speichern von Protokollen, die während des Betriebs des Roboters im USB-Speicher erstellt wurden, oder zum Exportieren und Importieren von Aufgaben. |
| 5 | Manipulator Kabelverbindungsklemme | Zum Anschließen des Manipulatorkabels an die Steuerung. |
| 6 | Anschlussklemme des Programmierhandgeräts | Zum Anschließen des Kabels des Programmierhandgeräts an die Steuerung. |
Lehrhandgerät
Nein | Artikel | Beschreibung |
|---|---|---|
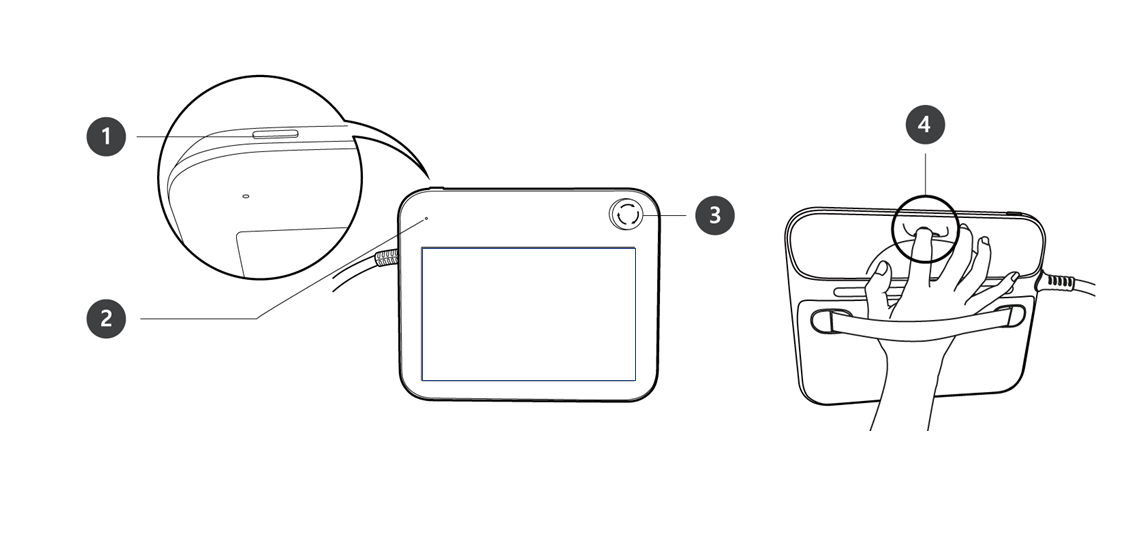
1 | Ein/Aus-Taste | Dient zum EIN-/AUSSCHALTEN der Hauptstromversorgung des Programmierhandgeräts. Weitere Informationen finden Sie Schalten Sie das System ein/ausunter . |
2 | Power-LED | Leuchtet auf, wenn Strom anliegt. |
3 | Not-aus-Taster | Drücken Sie im Notfall die Taste, um den Roboterbetrieb zu stoppen. |
4 | Taste für die Handführung | Halten Sie die Taste gedrückt, um den Roboter frei in die gewünschte Position zu bewegen. |
Hinweis
- Wenn das Programmierhandgerät während des Betriebs geschützt und montiert werden muss, macht die von uns mitgelieferte weiche Abdeckung die Verwendung sicherer und einfacher.