
Bildschirm Verschieben
Menülayout verschieben
| Artikel | Beschreibung | |
|---|---|---|
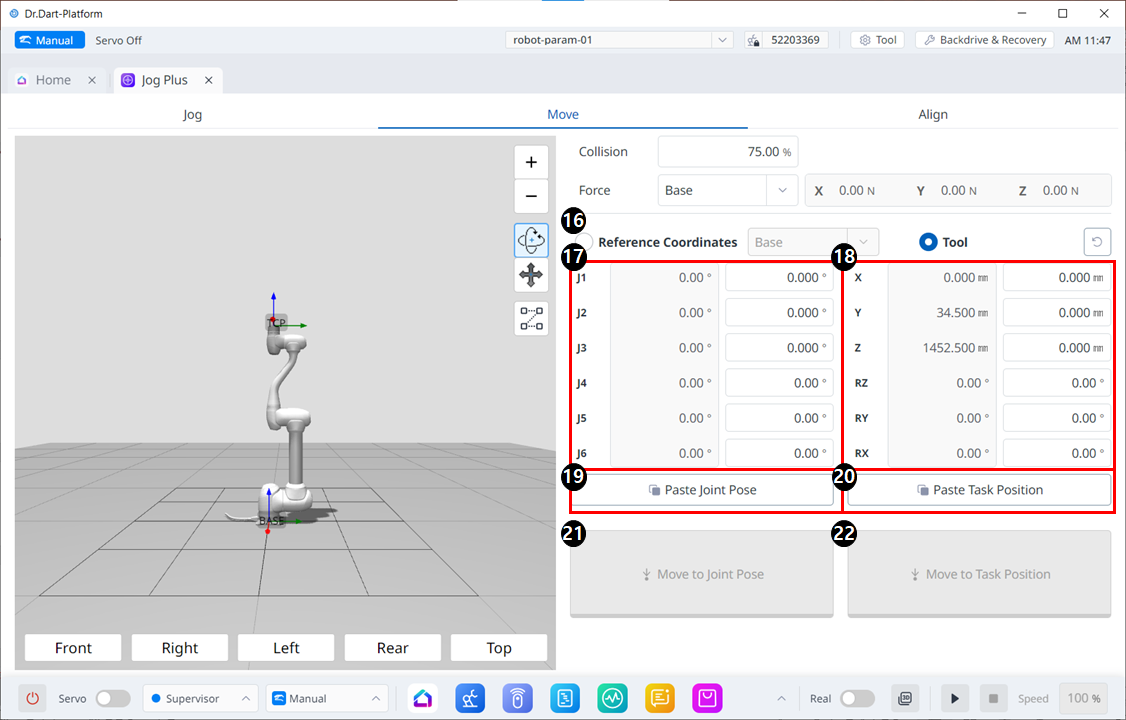
| 16 | Reference Coordinates | Wählen Sie das Referenzkoordinatensystem aus, das für die Aufgabenkoordinaten in Abbildung 18 verwendet werden soll. Sie können Basis-, Welt- oder Benutzerkoordinaten wählen. |
| 17 | Joint Posture | Zeigt die aktuelle Roboterhaltung und die Zielgelenkhaltung an. |
| 18 | Task Posture | Zeigt die aktuelle Roboterhaltung und die Zielaufgabenhaltung an, die zum ausgewählten Referenzkoordinatensystem passen. |
| 19 | Paste Joint Posture | Fügen Sie den in die Zwischenablage kopierten Haltungswert in das Gelenkhaltungsfeld ein. |
| 20 | Paste Task Posture | Fügen Sie den in die Zwischenablage kopierten Haltungswert in das Aufgabenhaltungsfenster ein. |
| 21 | Joint Move button | Mit dieser Taste bewegt sich der Roboter in die gewünschte Gelenkhaltung. |
| 22 | Task Move button | Mit dieser Schaltfläche bewegt sich der Roboter in die Zielposition für die Aufgabe. |