Versuchen Sie es mit Befehlsbeispielen
OPTIONAL NORMAL 20 MIN

Dieses Beispiel wird im Task Writer erstellt. Dieses Beispiel kann im Task Builder fast genauso ausprobiert werden.
Vorsicht
- Bevor Sie die Probe versuchen, stellen Sie sicher, zu lesen und zu folgen Sicherheitsvorkehrungen für die Verwendung. Weitere Informationen finden Sie unter TEIL 1. Sicherheitshandbuch.
- Für dieses Beispiel ist die in erstellte Task Writer-Datei Beispiele für Compliance-Befehle testenerforderlich.
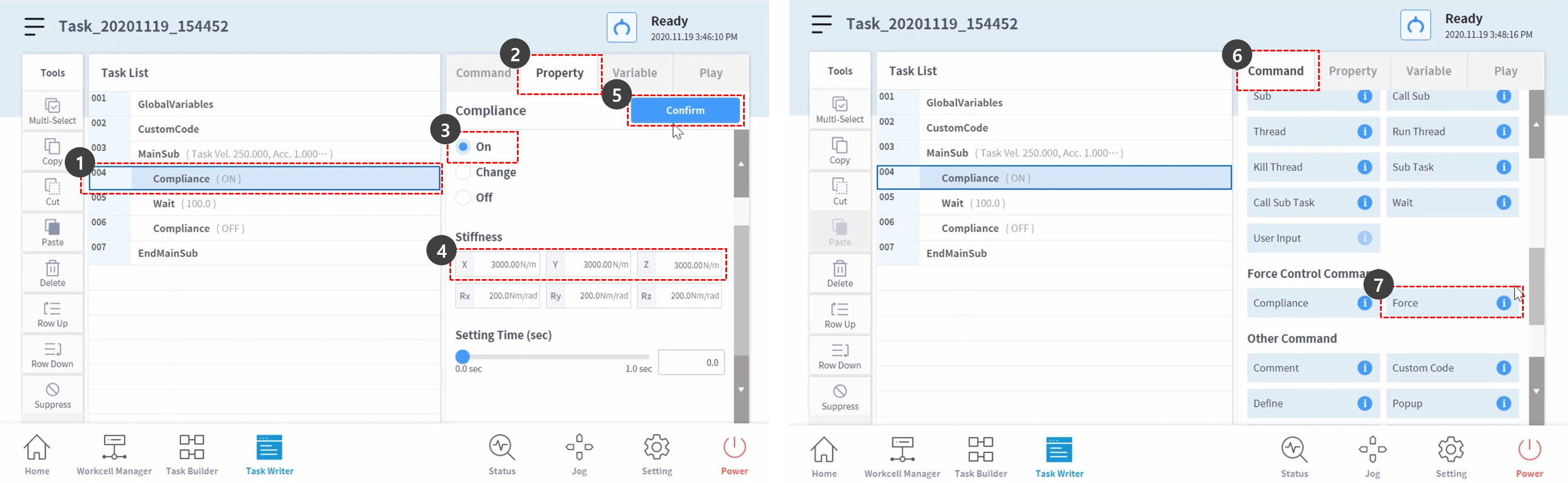
- Beispiele für Compliance-Befehle testen Öffnen Sie die erstellte Task Writer-Datei, und wählen Sie in der vierten Zeile der Aufgabenliste den Compliance-Befehl aus.
- Wählen Sie die Registerkarte Eigenschaft aus.
- Stellen Sie den Modus wie folgt ein: Modus ein aktiviert die Compliance-Kontrolle. Der Befehl Force ist nur verfügbar, wenn die Compliance-Kontrolle aktiviert ist.
- Modus: Ein
- Legen Sie den Standardwert für die Steifigkeit wie folgt fest:
- X, Y, Z: 3000 N/m (Standard)
- Rx, Ry, Rz: 200 Nm/Rad (Standard)
- Drücken Sie die Taste Bestätigen.
- Wählen Sie die Registerkarte Befehl.
- Fügen Sie einen Force-Befehl hinzu. Dieser Befehl soll zur Aktivierung der Kraftkontrolle verwendet werden.
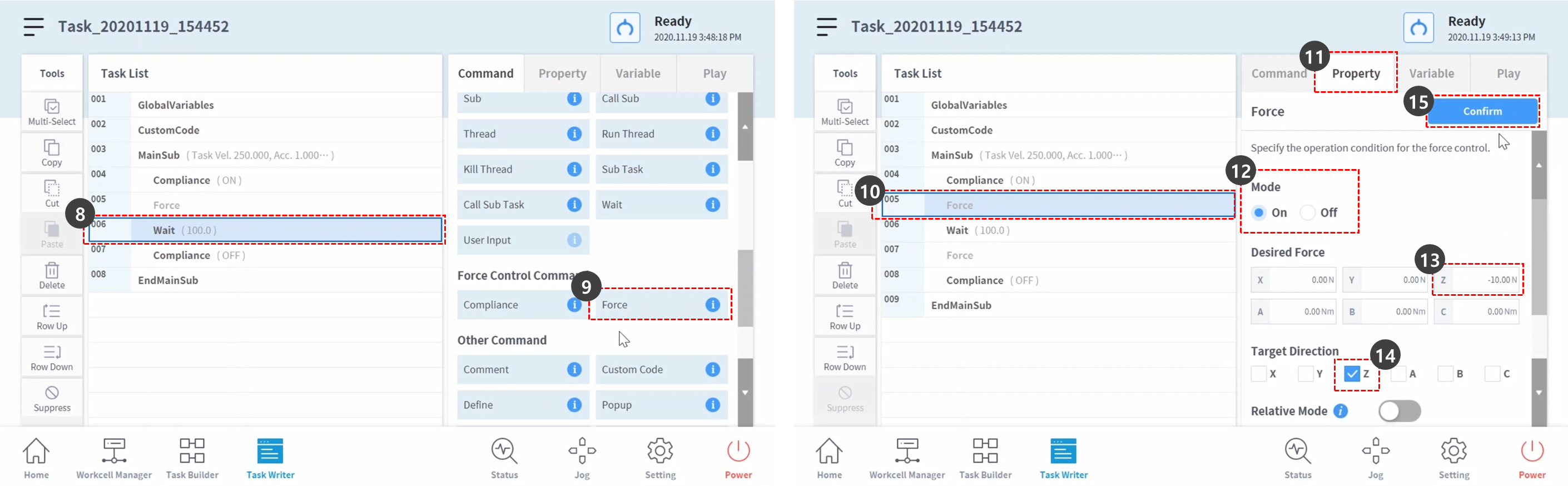
- Wählen Sie die sechste Zeile der Aufgabenliste aus.
- Fügen Sie einen Force-Befehl hinzu. Dieser Befehl soll zur Deaktivierung der Kraftsteuerung verwendet werden.
- Wählen Sie den Befehl Force in der fünften Zeile der Aufgabenliste aus.
- Wählen Sie die Registerkarte Eigenschaft aus.
- Stellen Sie den Modus wie folgt ein: Modus ein aktiviert die Force Control.
- Modus: Ein
- Stellen Sie die gewünschte Kraft wie folgt ein:
- X: 0 N (Standard)
- Y: 0 N (Standard)
- Z: -10 N
- Rx, Ry, Rz: 200 Nm/Rad (Standard)
- Z-Achse nur in Zielrichtung prüfen.
- Drücken Sie die Taste Bestätigen.
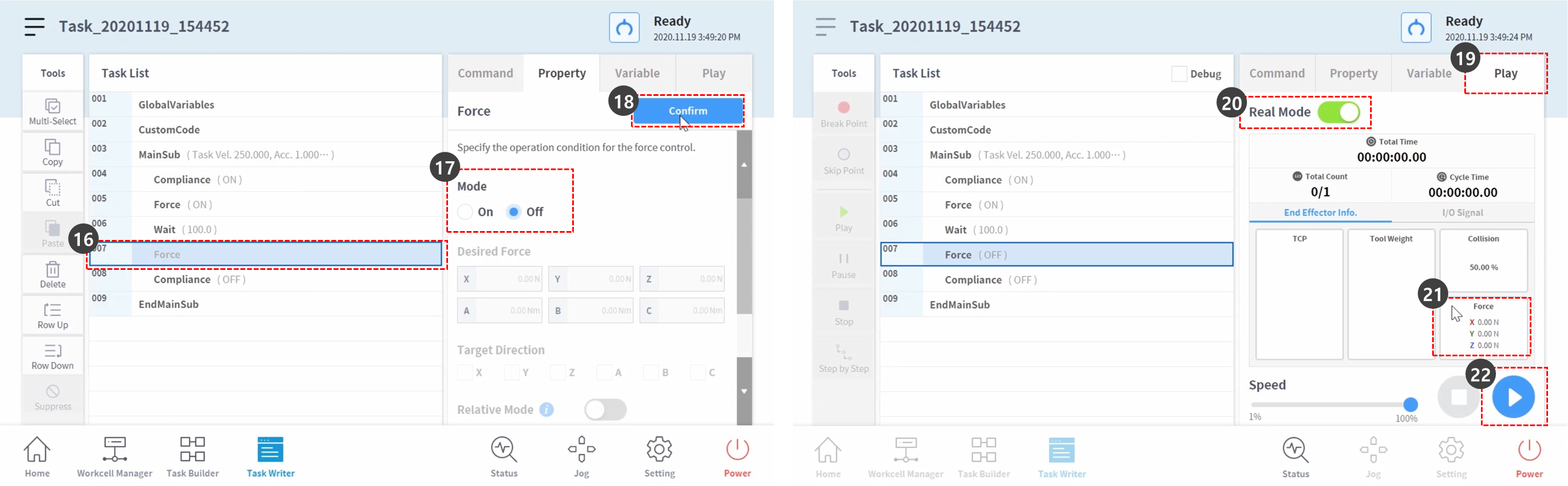
- Wählen Sie den Befehl Force in der siebten Zeile der Aufgabenliste aus.
- Stellen Sie den Modus wie folgt ein: Modus aus deaktiviert die Force Control.
- Modus: Aus
- Drücken Sie die Taste Bestätigen.
- Wählen Sie die Registerkarte Wiedergabe.
- Aktivieren Sie die Umschalttaste Real Mode.
- Sobald die Umschalttaste aktiviert wird, leuchtet die Taste grün.
- Prüfen Sie, ob die TCP-Kraft jeder Achse 0 beträgt. Dieser Kraftwert ist die Größe der derzeit auf das Roboterende TCP angewendeten externen Kraft.
- Drücken Sie die Wiedergabetaste.
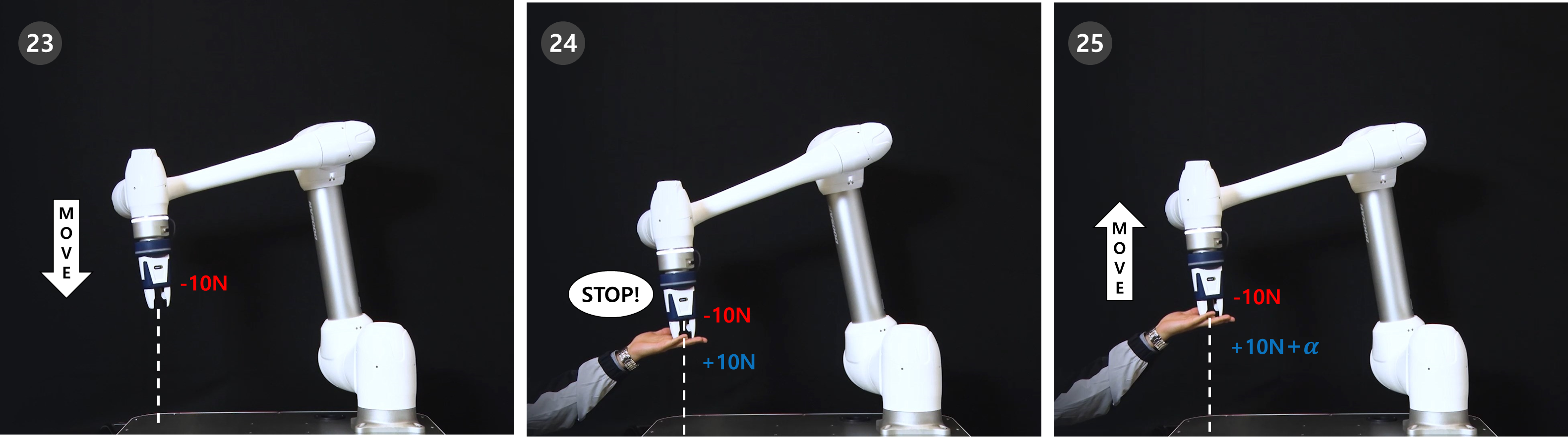
- -10N der Kraft wird auf das Roboterende TCP angewendet, wodurch sich der Roboter langsam in Richtung der Z-Achse bewegt.
- Das Roboterende stößt die Roboterbewegung in Richtung +Z-Achse ab, das Gegenteil der Roboterbewegungsrichtung. Wenn die Kraft, die den Roboter bewegt, und die Kraft, die die Bewegung des Roboters abstößt, eine Balance erreichen, behält der Roboter seine Position so, als ob er angehalten hätte.
- Wenn eine Kraft größer als +10N auf den Roboter ausgeübt wird, entspricht der Roboter der auf den Roboter einwirkung Kraft und bewegt sich in Kraftrichtung.