Beispiele für Compliance-Befehle testen
OPTIONAL NORMAL 20 MIN

Dieses Beispiel wird im Task Writer erstellt. Dieses Beispiel kann im Task Builder fast genauso ausprobiert werden.
Vorsicht
- Bevor Sie die Probe versuchen, stellen Sie sicher, zu lesen und zu folgen Sicherheitsvorkehrungen für die Verwendung. Weitere Informationen finden Sie unter TEIL 1. Sicherheitshandbuch.
Hinweis
- Wenn beim Aktivieren oder Deaktivieren der Konformitätskontrolle ein externes Drehmoment von 15Nm oder höher vorliegt, stoppt der Roboter das Programm aufgrund des JTS-Fehlers (Joint Torque Sensor).
- Die Steifigkeitsänderung kann unabhängig von der externen Drehmomentgröße durchgeführt werden.
- Während der Compliance-Kontrolle können gemeinsame Bewegungen, wie z. B. der MoveJ-Befehl, nicht ausgeführt werden.
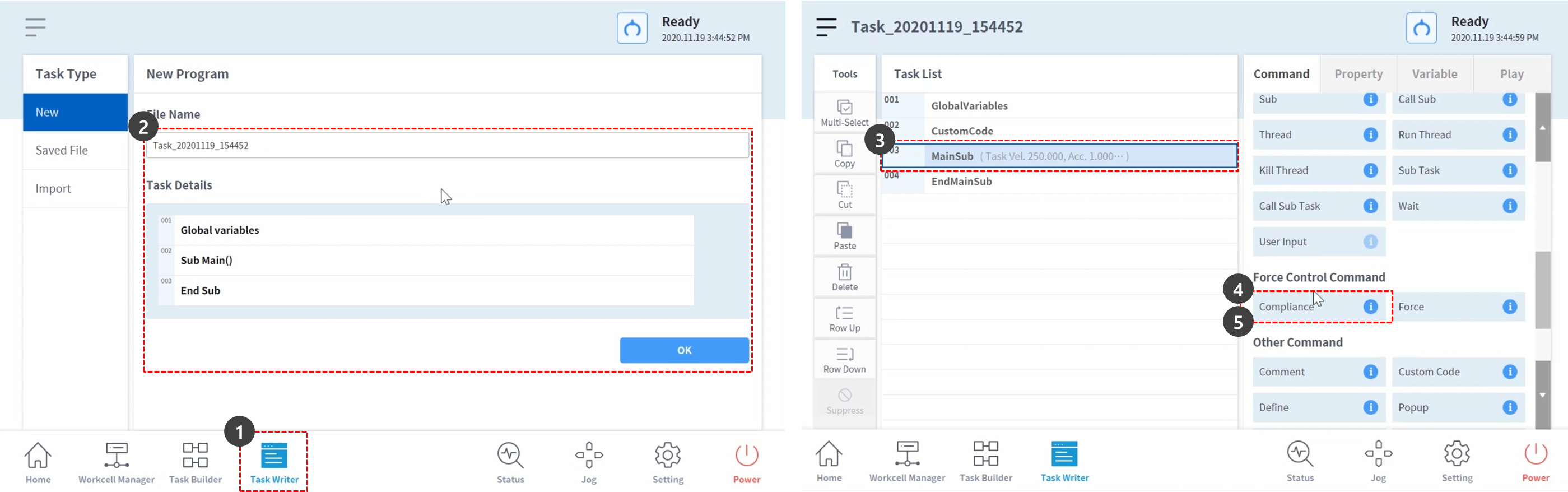
- Wählen Sie im unteren Menü den Task Writer aus.
- Geben Sie den Aufgabennamen ein, und drücken Sie die Taste OK.
- Wählen Sie in der dritten Zeile der Aufgabenliste den Befehl MainSub aus. In der nächsten Zeile der ausgewählten Zeile wird ein neuer Befehl hinzugefügt.
- Befehl Zum Hinzufügen Von Compliance. Dieser Befehl soll zur Aktivierung der Compliance-Kontrolle verwendet werden.
- Fügen Sie eine weitere Compliance-Kontrolle hinzu. Dieser Befehl soll zur Deaktivierung der Compliance-Kontrolle verwendet werden.
- Wählen Sie in der vierten Zeile den Compliance-Befehl aus. In der nächsten Zeile der ausgewählten Zeile wird ein neuer Befehl hinzugefügt.
- Befehl „Warten hinzufügen“.
- Wählen Sie die Registerkarte Eigenschaft aus.
- Stellen Sie die Wartezeit wie folgt ein:
- Wartezeit: 100 Sek.
- Drücken Sie die Taste Bestätigen.
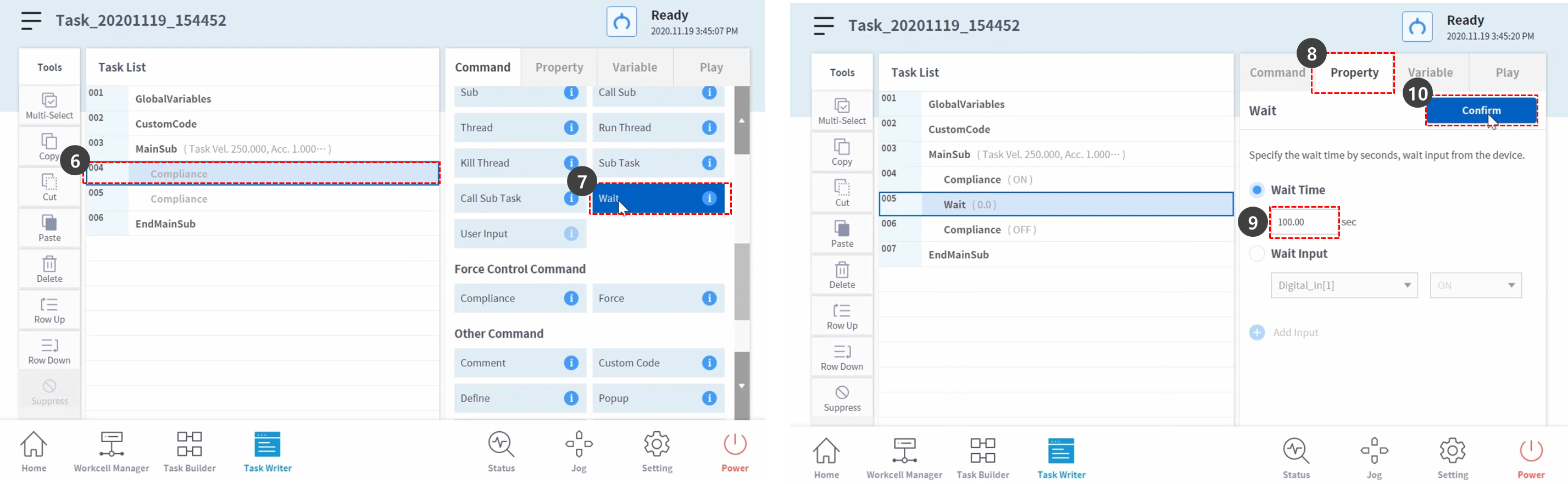
- Wählen Sie den Compliance-Befehl in der sechsten Zeile aus.
- Legen Sie den Modus in der Eigenschaft wie folgt fest: Modus aus deaktiviert die Compliance-Kontrolle.
- Modus: Aus
- Drücken Sie die Taste Bestätigen.
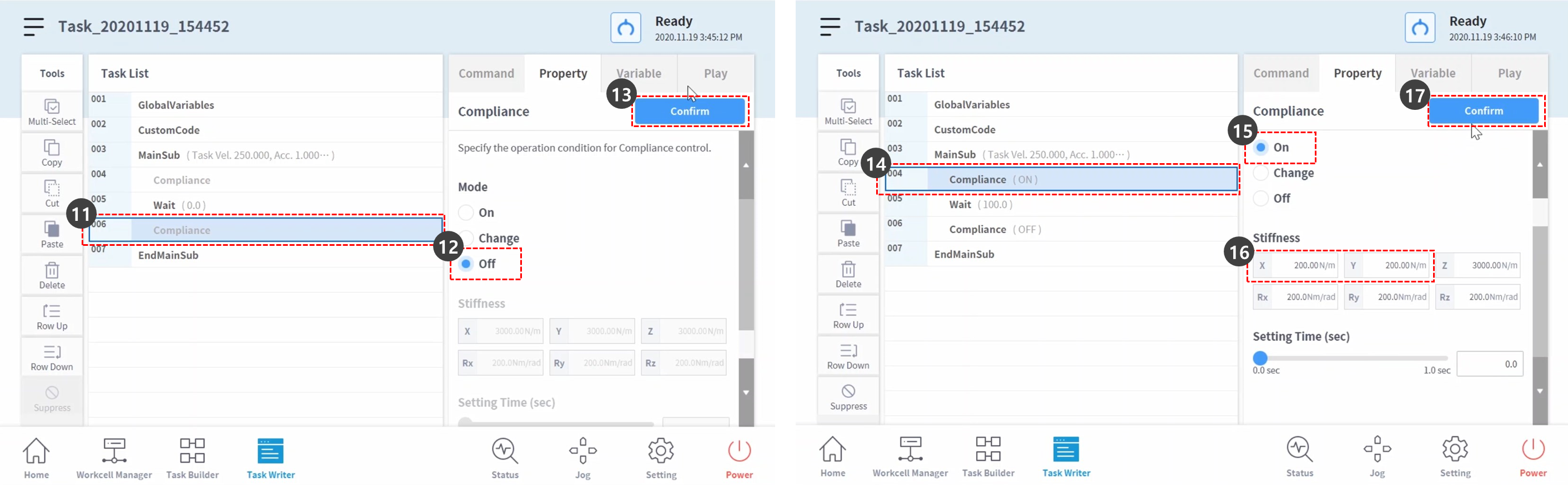
- Wählen Sie in der vierten Zeile den Compliance-Befehl aus.
- Legen Sie den Modus in der Eigenschaft wie folgt fest: Modus ein aktiviert die Compliance-Kontrolle.
- Modus: Ein
- Stellen Sie die Steifigkeit wie folgt ein: Verringern Sie die Steifigkeit der X- und Y-Richtung, um weichere Reaktionen in X- und Y-Richtung zu erhalten.
- X: 200 N/m
- Y: 200 N/m
- Z: 3000 N/m (Standard)
- Rx, Ry, Rz: 200 Nm/Rad (Standard)
- Drücken Sie die Taste Bestätigen.
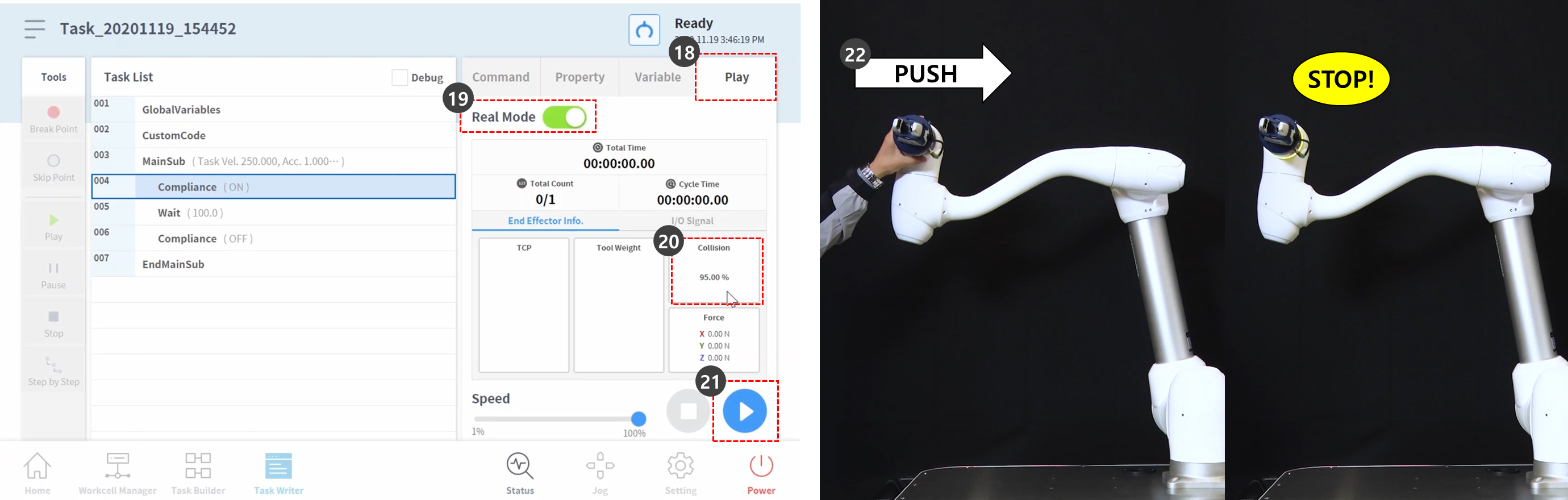
- Wählen Sie die Registerkarte Wiedergabe.
- Aktivieren Sie die Umschalttaste Real Mode.
- Sobald die Umschalttaste aktiviert wird, leuchtet die Taste grün.
- Diese Probe aktiviert absichtlich den Sicherheitsstopp, um den Grund für die Verringerung der Kollisionsempfindlichkeit während der Compliance-Kontrolle zu erklären. Die Kollisionsempfindlichkeit dieser Probe beträgt 95 %. In Fällen mit einer so hohen Kollisionsempfindlichkeit reagiert der Roboter sehr empfindlich auf Kollisionen.
- Bei einer Kollision wird der Roboter durch den Sicherheitsstopp gestoppt.
- Drücken Sie die Wiedergabetaste.
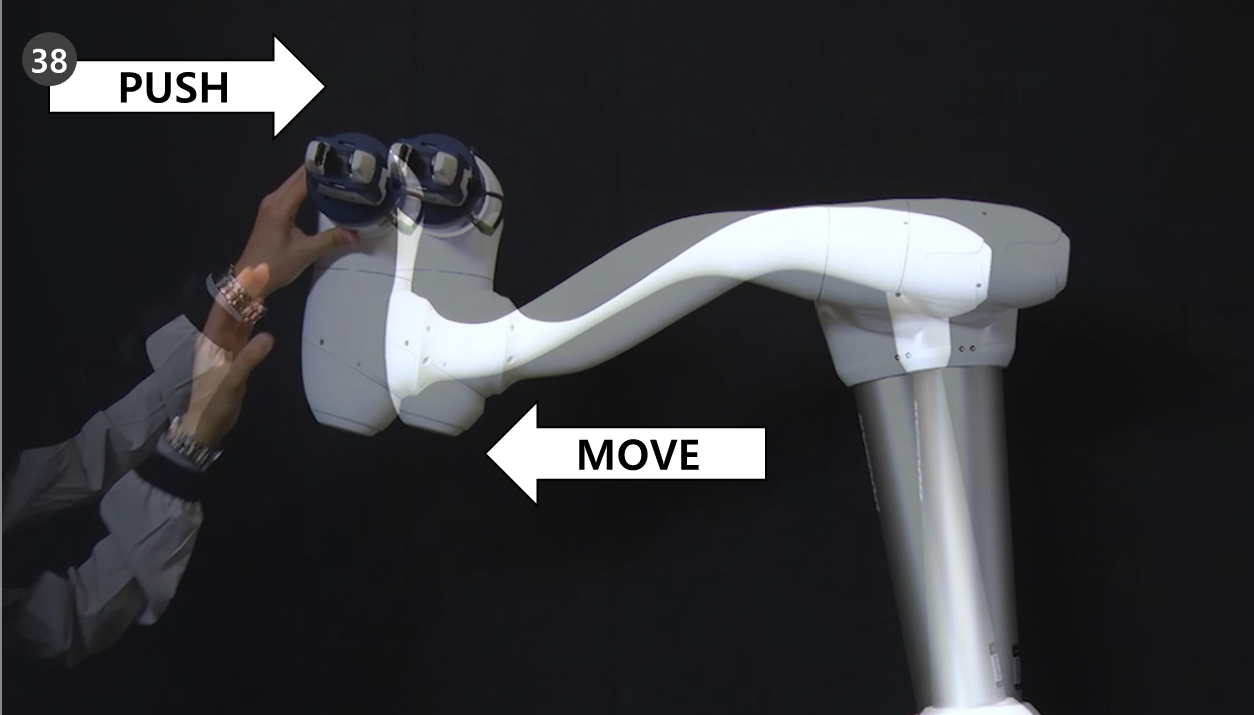
- Halten Sie das Roboterende fest, und schieben Sie es langsam in Richtung des Roboterkörpers. Der Roboter stoppt aufgrund eines Kollisionsfehlers. Während des Sicherheitsstopps aufgrund einer Kollision leuchtet die Roboter-LED gelb.
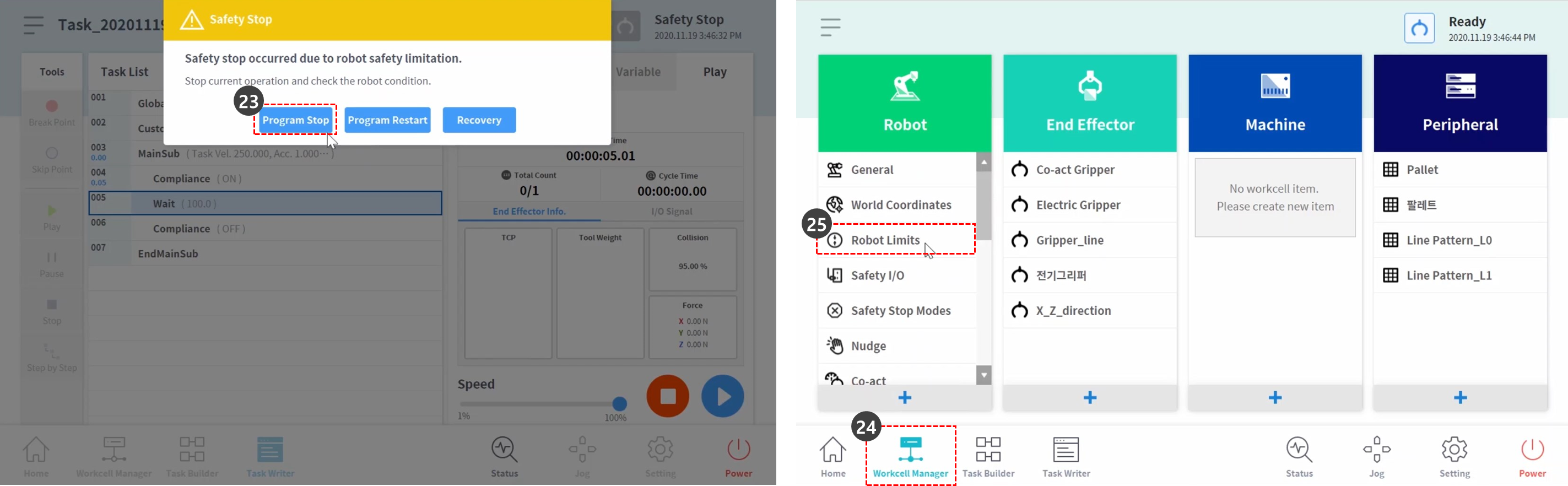
- Drücken Sie die Taste Program Stop im gelben Warnfenster für die Sicherheitsabschaltung auf dem Bildschirm. Das laufende Aufgabenprogramm wird angehalten.
- Wählen Sie im unteren Menü den Workcell Manager aus.
- Wählen Sie Roboter > Robotergrenzen.
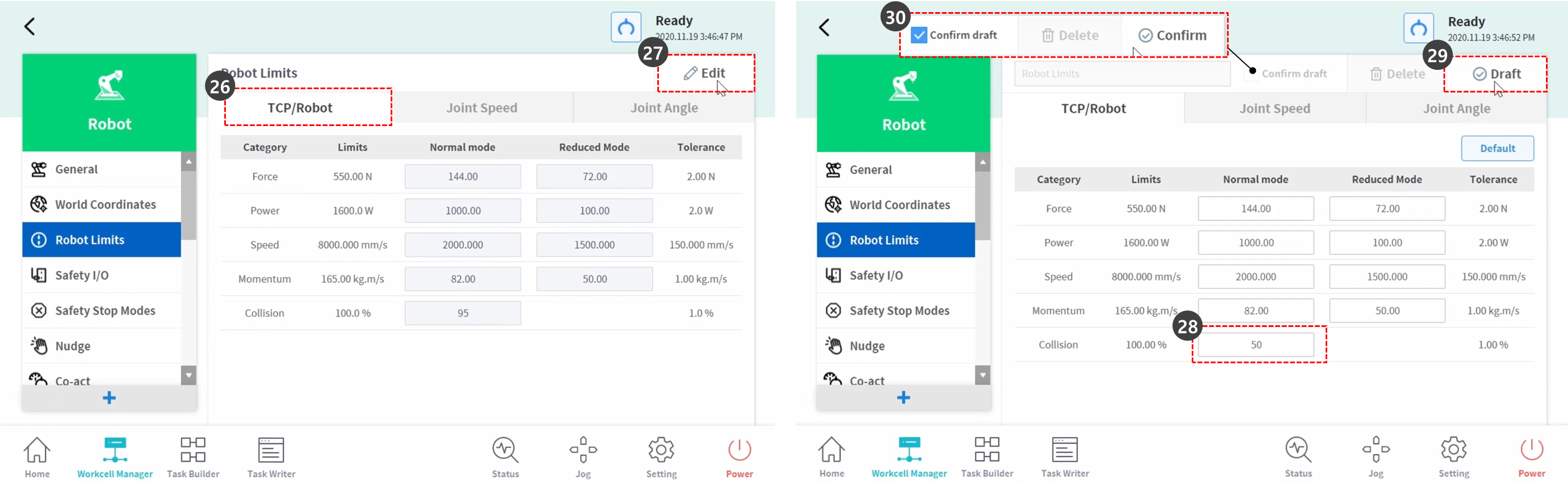
- Wählen Sie die Registerkarte TCP/Roboter.
- Klicken Sie auf die Schaltfläche Bearbeiten.
- Stellen Sie die Kollisionsempfindlichkeit wie folgt ein:
- Normalmodus: 50 %
- Drücken Sie die Schaltfläche Entwurf.
- Aktivieren Sie das Kontrollkästchen Entwurf bestätigen, und klicken Sie auf die Schaltfläche Bestätigen.
- Wählen Sie im unteren Menü den Task Writer aus.
- Wählen Sie die gespeicherte Datei auf dem linken Bildschirm aus.
- Prüfen Sie in Schritt 2, ob der Name der ersten Task-Datei der Name der Task ist, bevor Sie auswählen. Die zuletzt gespeicherte Aufgabe befindet sich oben in der Liste der Task Writer-Dateien.
- Drücken Sie die Taste Öffnen.
- Wählen Sie die Registerkarte Wiedergabe.
- Aktivieren Sie die Umschalttaste Real Mode.
- Drücken Sie die Wiedergabetaste.
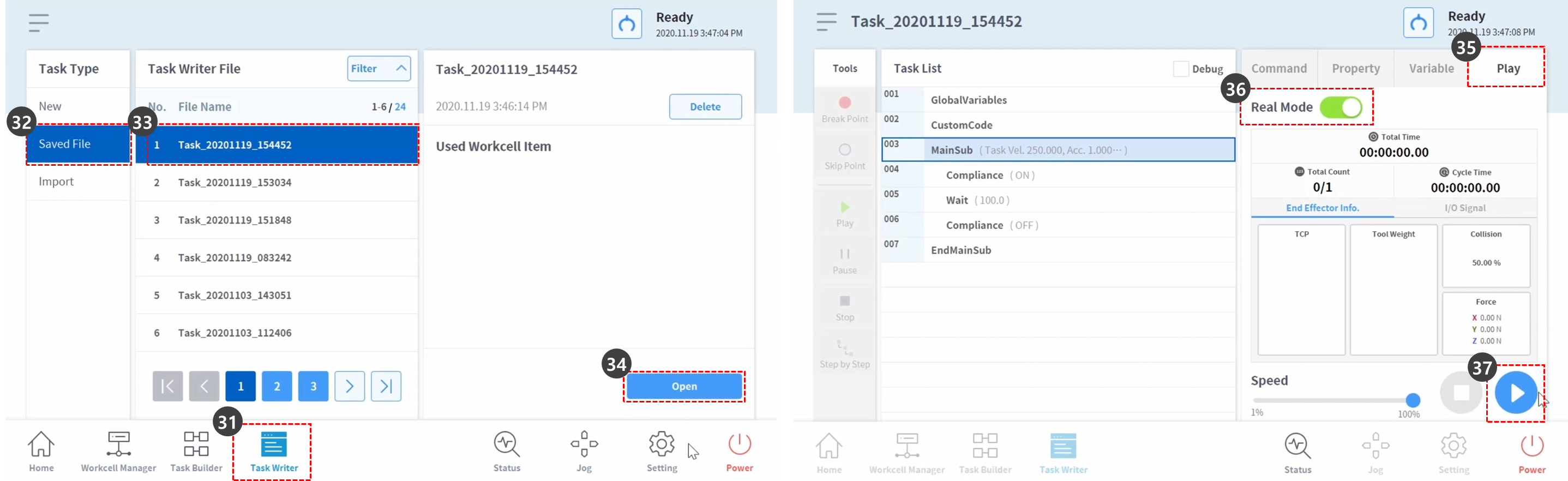
- Halten Sie das Roboterende fest, und schieben Sie es langsam in Richtung des Roboterkörpers. Der Roboter bewegt sich aufgrund der Schubkraft und kehrt in seine ursprüngliche Position zurück.