
Systemwiederherstellung
Das Robotersystem kann auf eine bestimmte Version zurückgesetzt werden, die der Benutzer auswählt.
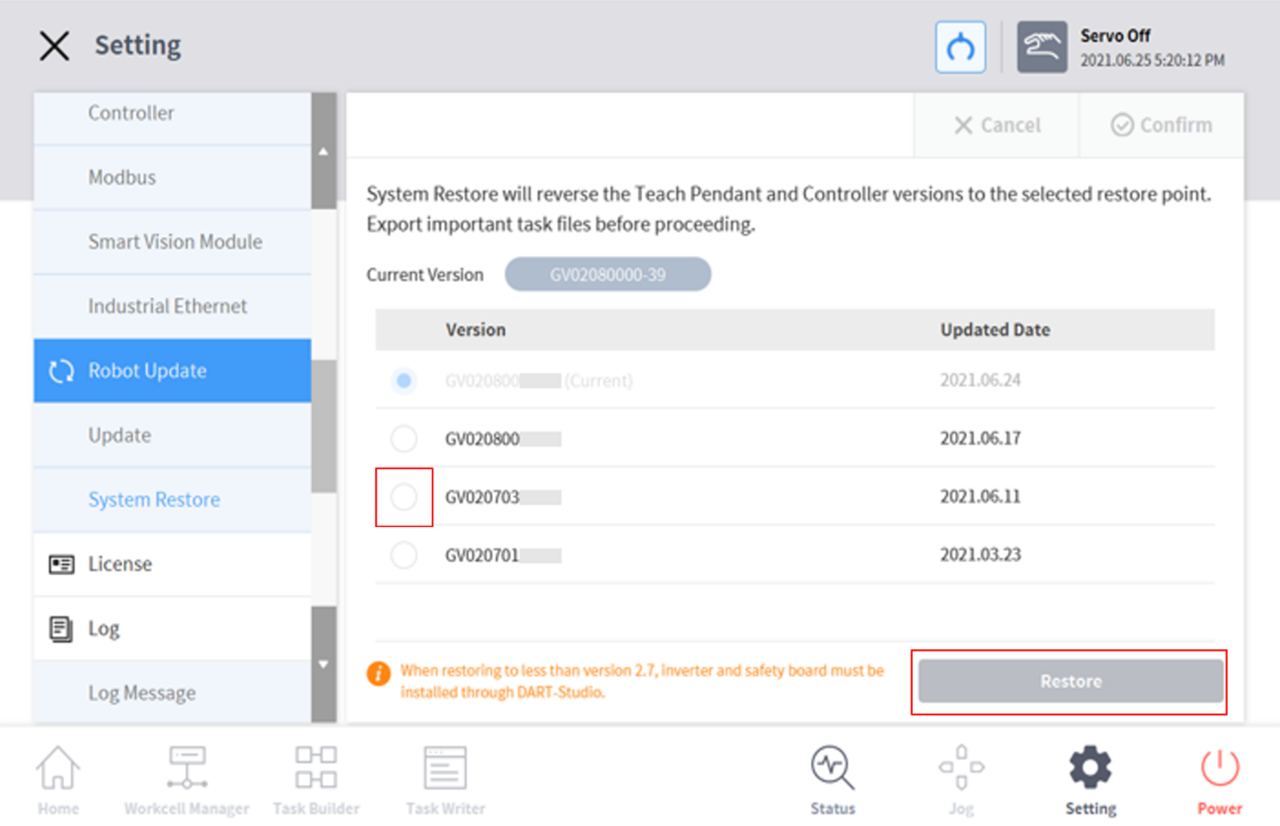
- Im Einstellungsmenü Robot Update > System Restore (Aktualisierung des Roboters > Systemwiederherstellung) auswählen.
- Die letzten fünf im Robotersystem installierten Versionen werden angezeigt.
- Das Optionsfeld der aktuellen Version ist aktiviert.
- Optionsfeld der Version auswählen, die wiederhergestellt werden soll.
- Die Schaltfläche „Restore“ (Wiederherstellen) wird aktiviert.
- Die Schaltfläche „Restore“ (Wiederherstellen) drücken.
- System nach der Wiederherstellung neu starten.
Hinweis
Falls auf das System über Windows zugegriffen wird, so steht die Funktion für Wiederherstellung des Systems nicht zur Verfügung.
Version : A Series
- Wenn nach der Systemwiederherstellung bei einem Produkt der A-Serie eines der folgenden Probleme auftritt, müssen Sie eine Reibungskalibrierung durchführen (siehe Beschreibung in „Reibungskalibrierung“).
- Ein Problem erschwert die Steuerung der direkten Einlernfunktion
- Das direkte Einlernen funktioniert nicht ordnungsgemäß, obwohl die Einstellungen für Werkzeuggewicht und Gewichtsmittelpunkt korrekt sind.
- Wenn sich der Roboter beim direkten Einlernen zu schnell bewegt oder zu viel Kraft anwendet
- Wenn beim direkten Einlernen die Steuerung in eine bestimmte Richtung schwierig ist
- Wenn häufig eine Kollisionserkennung erfolgt und die Kollisionsempfindlichkeit auf die Standardeinstellung festgelegt ist
- Wenn der Fehler „2.9015“ sporadisch im Bedientableau auftritt
- Error 2.9015: The external force of the robot tip has exceeded the safe range.
(Fehler 2.9015: Die von außen auf die Roboterspitze einwirkende Kraft hat den sicheren Bereich überschritten.)
- Error 2.9015: The external force of the robot tip has exceeded the safe range.