
Ausrichtung basierend auf Basisachse/World-Achse
Wenn die Installation in Basis-/World-Achsenrichtung des Roboterfußes positioniert ist, besteht vor dem Einlernen des Werkstücks die Möglichkeit, den TCP im Werkstück auszurichten. Da die Einlernstellung übereinstimmend mit der Basis-/World-Koordinatenachse konfiguriert werden kann, ist die Angabe einer Einlernstellung unkompliziert. Um das Einlernen nach der Arretierung der Stellung durchzuführen, kann die direkte Einlernfunktion mit arretierter Ebene oder Geraden über die Steuerpulttasten verwendet werden.
Zur Ausrichtung von TCP des Roboters auf der Grundlage der Achse des Fußes wie folgt vorgehen:
- Registerkarte Align (Ausrichten) und dann die Registerkarte Basic Alignment (Grundausrichtung) auswählen.
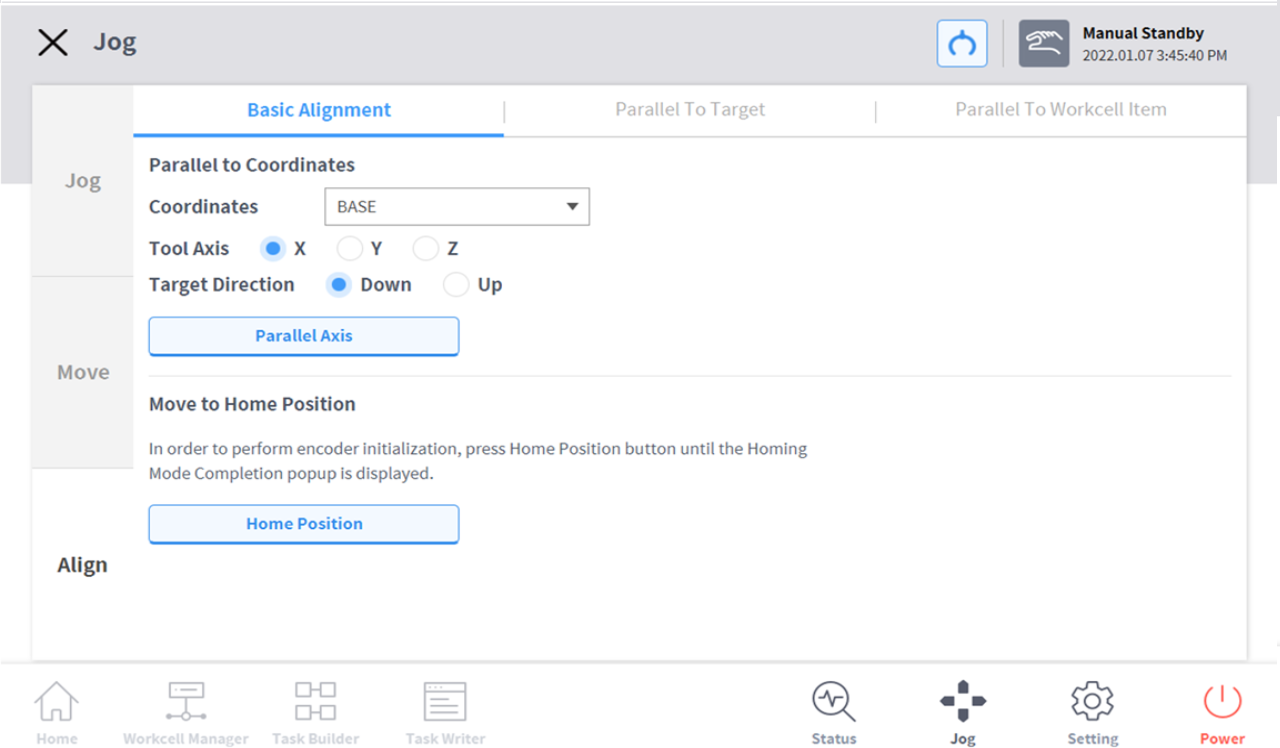
- Bezugskoordinaten für die Ausrichtung auswählen.

- Die als Bezugswert benötigte Werkzeugachse auswählen.

- Die Richtung der Ausrichtung auswählen.

- Die Schaltfläche Align Axis (Achse ausrichten) antippen und halten, um die Achse auszurichten.