|
No. |
Artikel |
Beschreibung |
|---|---|---|
|
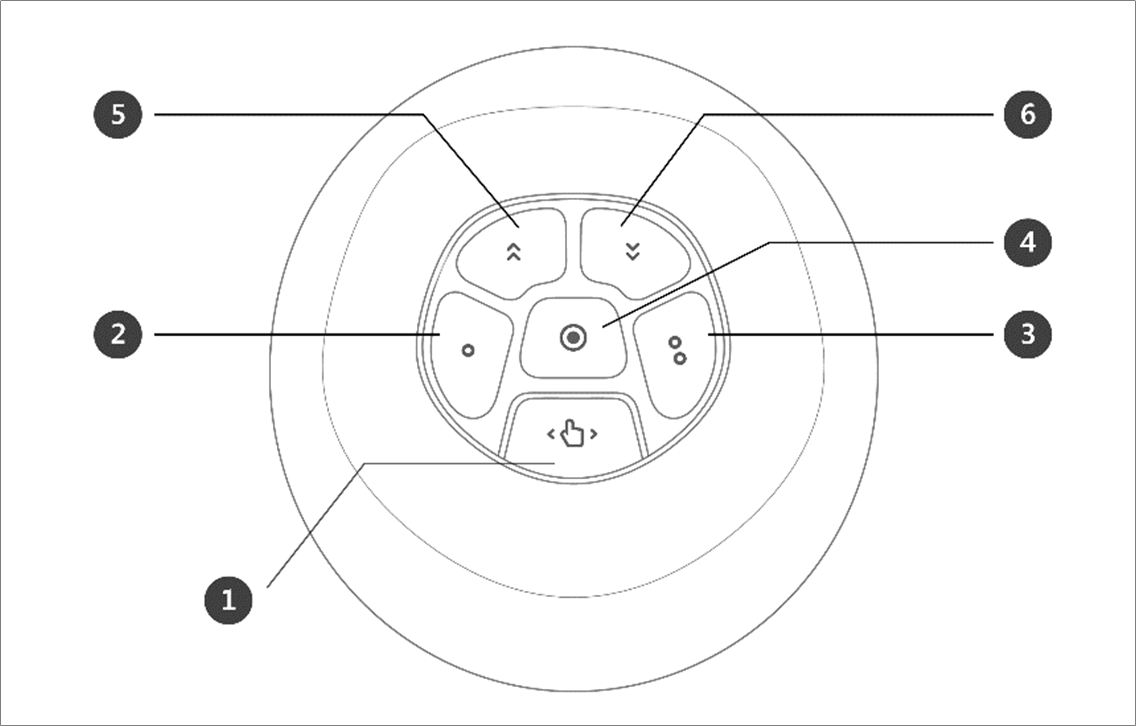
1 |
Handführung nicht verfügbar |
Dies sind Befehle, mit denen die Position des Roboters angepasst oder geändert werden kann. |
|
2, 3 |
Taste Benutzereinstellung |
Mit dieser Schaltfläche kann die Position des Roboters geändert werden, indem eine Position entsprechend einer Sperrbedingung eingegeben wird, die einem Modus entspricht.
|
|
4 |
Taste Position Speichern |
Speichert die aktuelle Roboterposition. |
|
5 |
Eine Reihe |
Verschiebt den auf dem Bildschirm angezeigten Fokus um eine Zeile nach oben |
|
6 |
Eine Zeile Nach Unten |
Verschiebt den auf dem Bildschirm angezeigten Fokus um eine Zeile nach unten |
Direktes Lehren (Handführung)
Die direkte Programmierung wird verwendet, um das Roboterende mit den Händen zu halten, um den Roboter in die gewünschte Position zu schieben und zu ziehen und die Position auf die aktuell ausgewählte Bewegung anzuwenden.
Es gibt zwei direkte Lernmethoden.
-
Freedrive: Jedes Gelenk bewegt sich in die Richtung, in der die Kraft vom Benutzer angewendet wurde
-
Bewegung Mit Zwangsbedingungen: Das Roboterende bewegt oder dreht sich nur in die Richtung, die in der Bewegung mit Zwangsbedingung festgelegt wurde, selbst wenn eine Kraft aus einer zufälligen Richtung angewendet wird
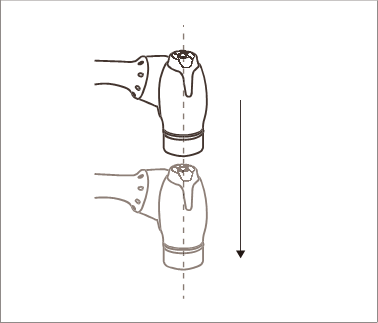
Freedrive
Durch Drücken der Taste 1 wird der Freedrive-Modus aktiviert, sodass der Roboter frei bewegt werden kann. Jedes Gelenk bewegt sich in die Richtung, in der die Kraft vom Benutzer angewendet wurde. Der Roboter kann nach Loslassen der Taste nicht mehr von Hand bewegt werden.
-
Während der direkten Programmierung blinkt die Roboter-LED zyanblau.
-
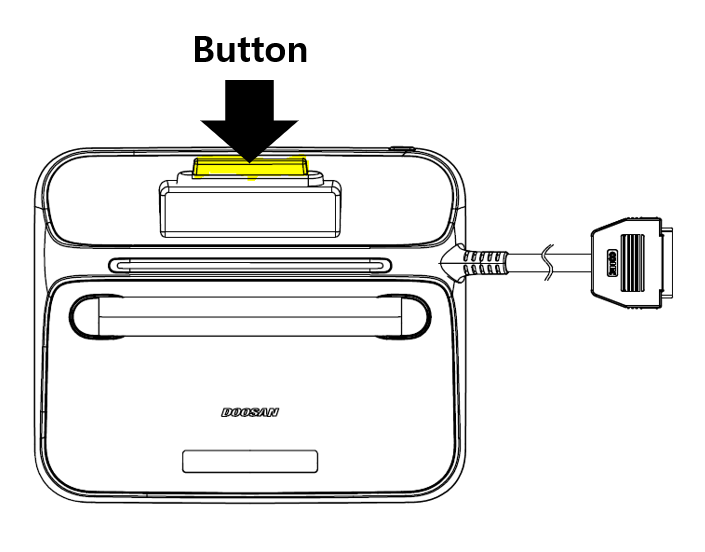
Durch Drücken der Taste für die Handführung auf der Rückseite des Programmierhandgeräts wird der Freedrive-Modus aktiviert, genau wie durch Drücken der Taste 1, und der Roboter kann frei bewegt werden.
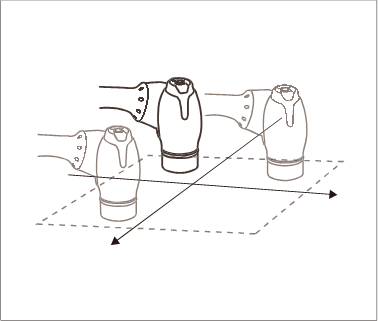
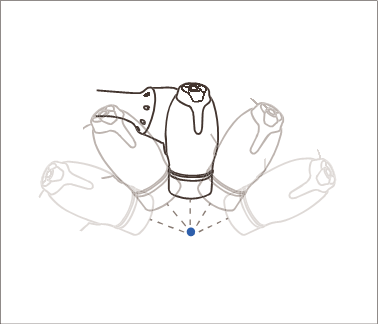
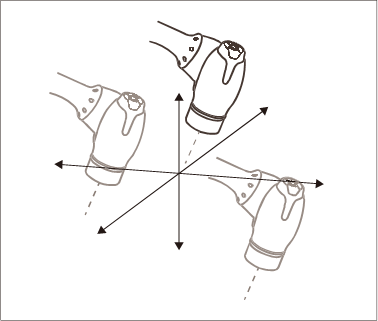
Bewegung Mit Zwangsbedingungen
Wenn die Tasten 2 und 3 gedrückt werden, bewegt sich das Roboterende nur in die Richtung, die der Bedingungsbedingung entspricht, selbst wenn eine Kraft aus einer zufälligen Richtung angewendet wird. Die Bedingungsbedingung kann mit 2 von 4 der Bedingungen in der folgenden Abbildung festgelegt werden: Z-Achse mit Zwangsbedingungen, Ebene mit Zwangsbedingungen, Oberfläche mit Zwangsbedingungen und Richtung mit Zwangsbedingungen.
Cockpit-Tasten-Einstellung
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
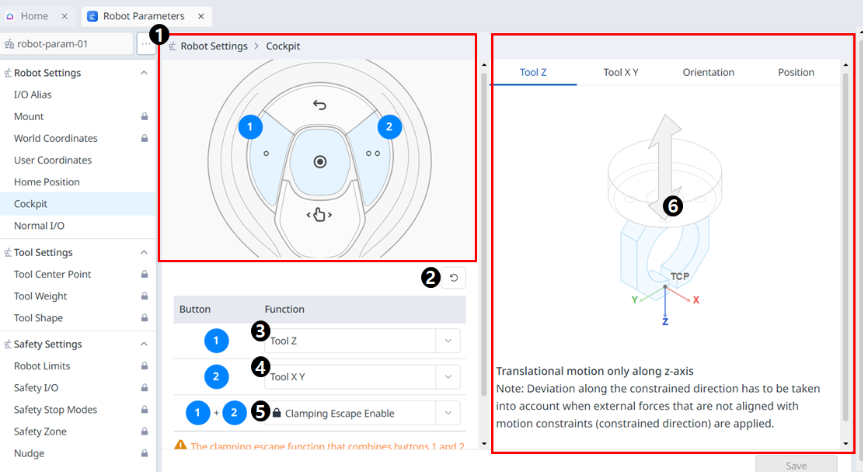
1 |
Cockpit-Bild |
Dies ist ein Bild für die Cockpit-Einstellungen. |
|
2 |
Informationsnachricht |
Mit dieser Schaltfläche können Sie die eingestellten Werte initialisieren. |
|
3 |
1-Tasten-Einstellung |
In diesem Abschnitt können Sie die Funktion auswählen, die für die Taste 1 eingestellt werden soll. |
|
4 |
2-Tasten-Einstellung |
In diesem Abschnitt können Sie die Funktion auswählen, die für die Taste 2 eingestellt werden soll. |
|
5 |
Einstellung Der Tasten 1+2 |
In diesem Abschnitt können Sie auswählen, ob die Klammer für die Tasten 1 und 2 aktiviert werden soll. |
|
6 |
Navigationsbild |
Ein Führungsbild für Cockpit-Einstellelemente. |
Status Der Cockpit-Schaltfläche Abrufen
Der Benutzer kann Informationen darüber erhalten, ob die Cockpit-Taste gedrückt oder losgelassen wird.
Der Roboter bietet die Funktion zur Steuerung der Cockpit-Taste, sodass sie in verschiedenen Anwendungen verwendet werden kann.
-
Unter „Überwachungsdaten“ in der Kommunikations-API finden Sie Informationen über die Schaltfläche Cockpit.
-
Wenn Sie die Cockpit-Taste des Roboters drücken oder umgekehrt, können Sie ihn über die DRL-API erkennen.
-
DRL-API: get_cockpit_input (siehe Programmierhandbuch)
-
Parameter: (int) Index
-
Rücksendungen: (int) 1: Pressed (die Taste wird gedrückt), 0: Released (die Taste ist nicht gedrückt)
-