1. Erstellen Sie ein Programm
Sie müssen im Voraus ein Programm zur Fernsteuerung erstellen.
-
Erstellen Sie eine Aufgabe im Modul Task Editor.
-
Speichern Sie die Aufgabe, wenn die Erstellung abgeschlossen ist.
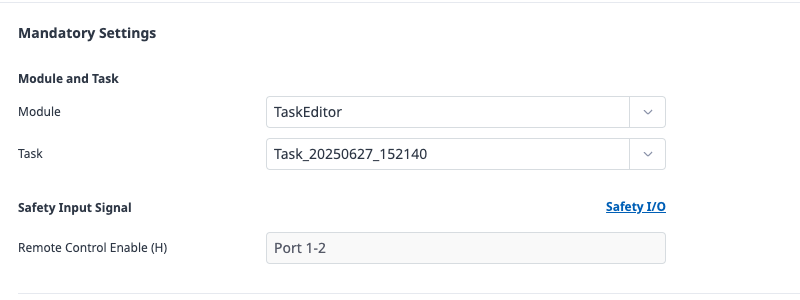
2. Obligatorische Einstellungen
Im Remote Control modul müssen Sie die folgenden erforderlichen Elemente konfigurieren:
-
Wählen Sie Module und Tasks
-
Wählen Sie das auszuführende Modul und die auszuführende Aufgabe aus der Liste.
-
-
Geben Sie die Aktivierungssignale für die Remote Control an
-
Wählen Sie im Menü Sicherheits-E/A des Robot Parameter moduls das Aktivierungssignal der Fernbedienung aus , und weisen Sie den zu verwendenden Port zu.
-
Der Remote control mode kann nicht ausgeführt werden, wenn die erforderlichen Einstellungen nicht abgeschlossen sind.
3. Erweiterte Einstellungen (Optional)
Bei Bedarf können Sie erweiterte Einstellungen festlegen.
Wenn diese Funktion nicht konfiguriert ist, bleibt sie deaktiviert und hat keine Auswirkungen auf den Fernbedienungsbetrieb.
-
Beim Neustart automatisch starten

-
Wenn diese Option aktiviert ist, öffnet das System automatisch den Fernbedienungsbildschirm, wenn der Roboter eingeschaltet wird.
-
-
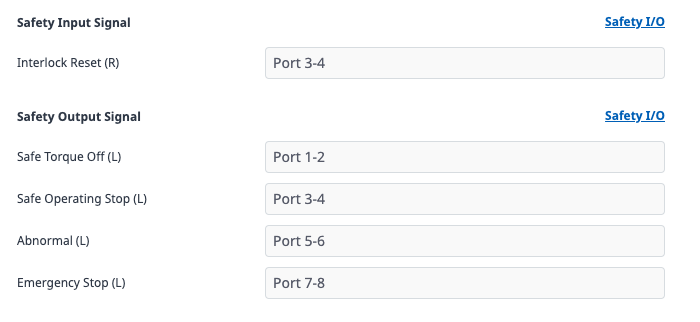
Sicherheitsausgangssignale
-
Weisen Sie denSignalen STO ( Safe Torque Off ) und SOS ( Safe Operating Stop ) die Ausgangsanschlüsse zu.
-
Hinweis
For more information on each signal, please refer to the Safety Signal I/O.
-
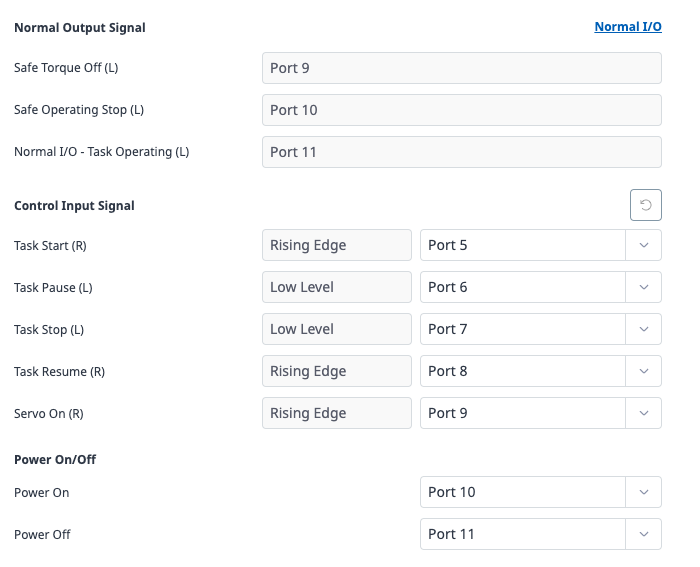
Eingangssignale Steuern
-
Stellen Sie den digitalen Eingangsanschluss für die Befehle Start, Stopp, Pause und Fortsetzen ein.
-
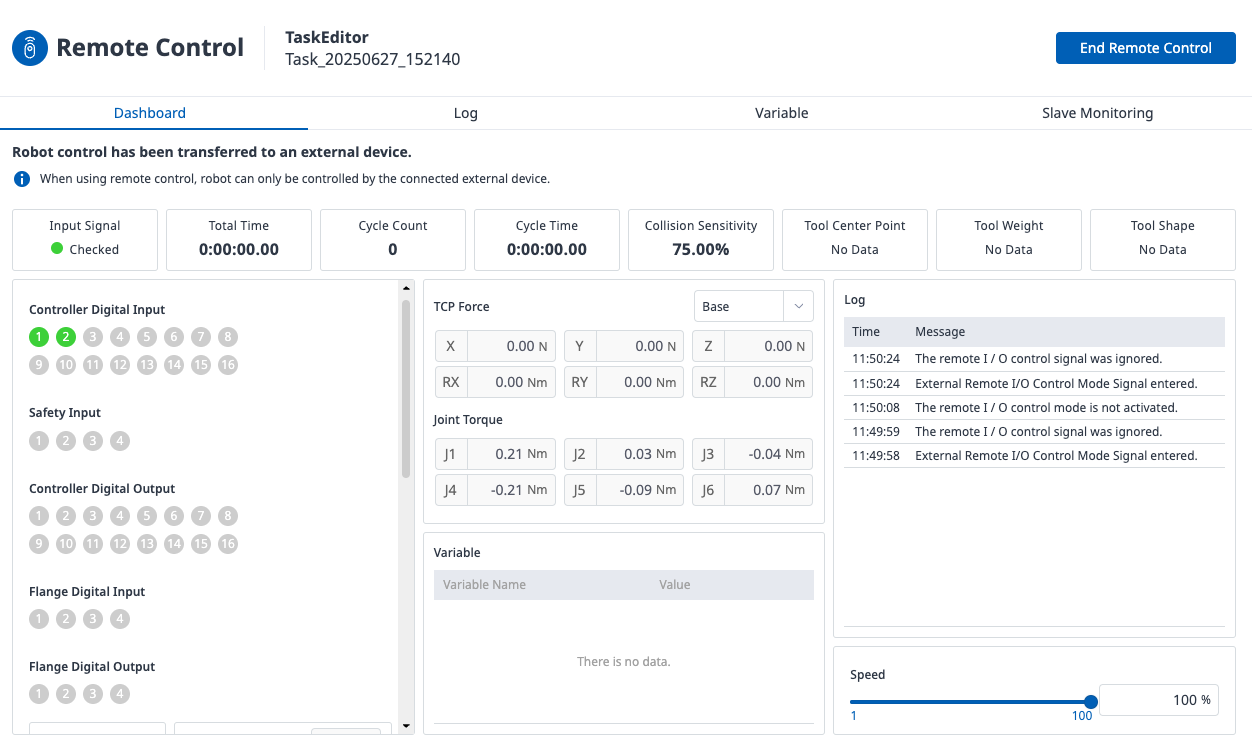
4. Aktivieren des Fernbedienungsmodus
Sobald die Einrichtung abgeschlossen ist, können Sie in den Fernsteuerungsmodus wechseln.
-
Klicken Sie im Bildschirm Remote Control auf die Schaltfläche Fernbedienung starten.
5. Remote Control Ausführen
Führen Sie das angegebene Programm Remote aus, und überwachen Sie dessen Status.
For example, if you want to execute a designated task on the robot after entering Remote Control mode, you can first activate the servo by sending a Servo On (rising edge) signal to the assigned port, then send a Task Start (rising edge) signal to run the task selected in the required settings.
Diese Signale sind optional, sodass der Roboter ohne sie in den Remote Control mode wechseln kann. Um diese optionalen Funktionen jedoch innerhalb des Modus nutzen zu können, müssen Sie die erforderlichen Ports zuweisen und die entsprechenden Signale korrekt anwenden.