
Remote Control modul
Das FRemote Control modul ermöglicht die Ausführung der Fernsteuerung für Aufgaben, die Sie bereits erstellt haben.
Unter Bedienerberechtigung können Sie den Remote Control Mode starten, die IO-Einstellungen jedoch nicht ändern. E/A-Einstellungen können nur mit Administratorberechtigung geändert werden.
Menü
Artikel | Beschreibung | |
|---|---|---|
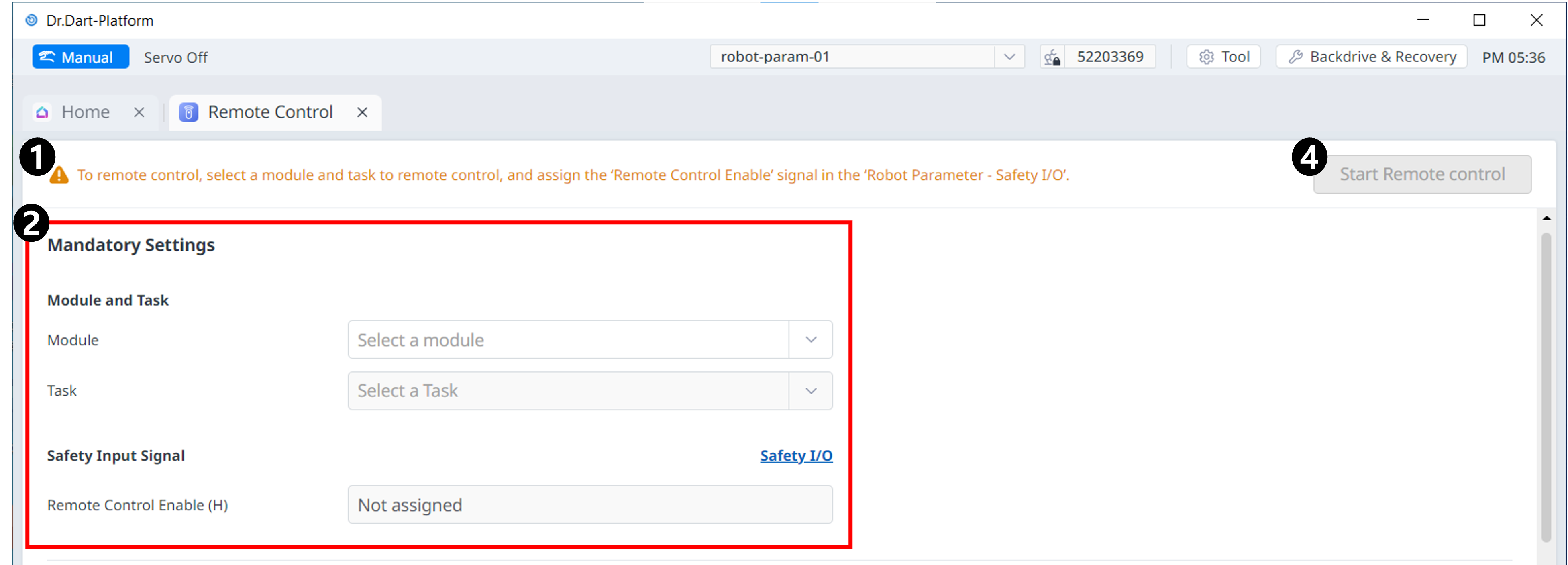
| 1 | Warnung | Dies zeigt die erforderlichen Vorsichtsmaßnahmen bei der Verwendung des Moduls an. |
| 2 | Obligatorische Einstellungen | Dies ist eine obligatorische Einstellung für die Fernbedienung. Sie können Module und Aufgaben sowie sichere Eingangssignale einstellen. |
| 3 | Erweiterte Einstellungen | Dies ermöglicht erweiterte Einstellungen für die Fernbedienung. Sie können jeden Port für die Aufgabe so einstellen, dass sie gestartet/angehalten/gestoppt/fortgesetzt/Servo eingeschaltet wird. Wenn die Fernbedienung so eingestellt ist, dass sie nach dem Neustart automatisch ausgeführt wird, wird sie ausgeführt, sobald Dart-Platform neu gestartet wird. |
| 4 | Starten Sie Die Remote Control | Mit dieser Taste können Sie die Fernbedienung starten, nachdem alle Einstellungen abgeschlossen wurden. |
Konfigurationselemente
Obligatorische Einstellungen
In den obligatorischen Einstellungen müssen Sie die Elemente konfigurieren, die für die Ausführung der Fernbedienung erforderlich sind.
Diese Einstellungen müssen abgeschlossen sein, um die Fernbedienungsfunktion zu aktivieren.
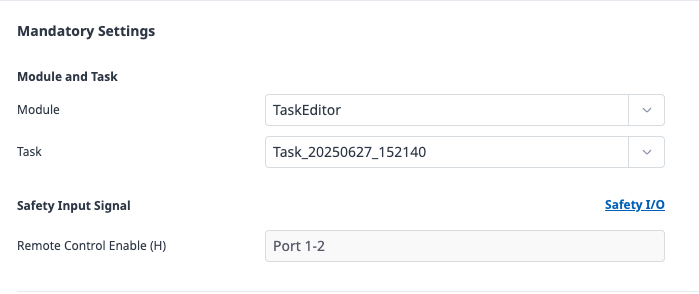
Wählen Sie Modul und Aufgabe
Wählen Sie das Modul aus, das die Fernsteuerung unterstützt, und geben Sie die Aufgabe an, die innerhalb dieses Moduls gesteuert werden soll.
Sicherheitseingangssignal
Konfigurieren Sie das Aktivierungssignal der Fernbedienung.
Sie können dies auf der Registerkarte Sicherheits-E/A des Moduls Robot Parameter festlegen.
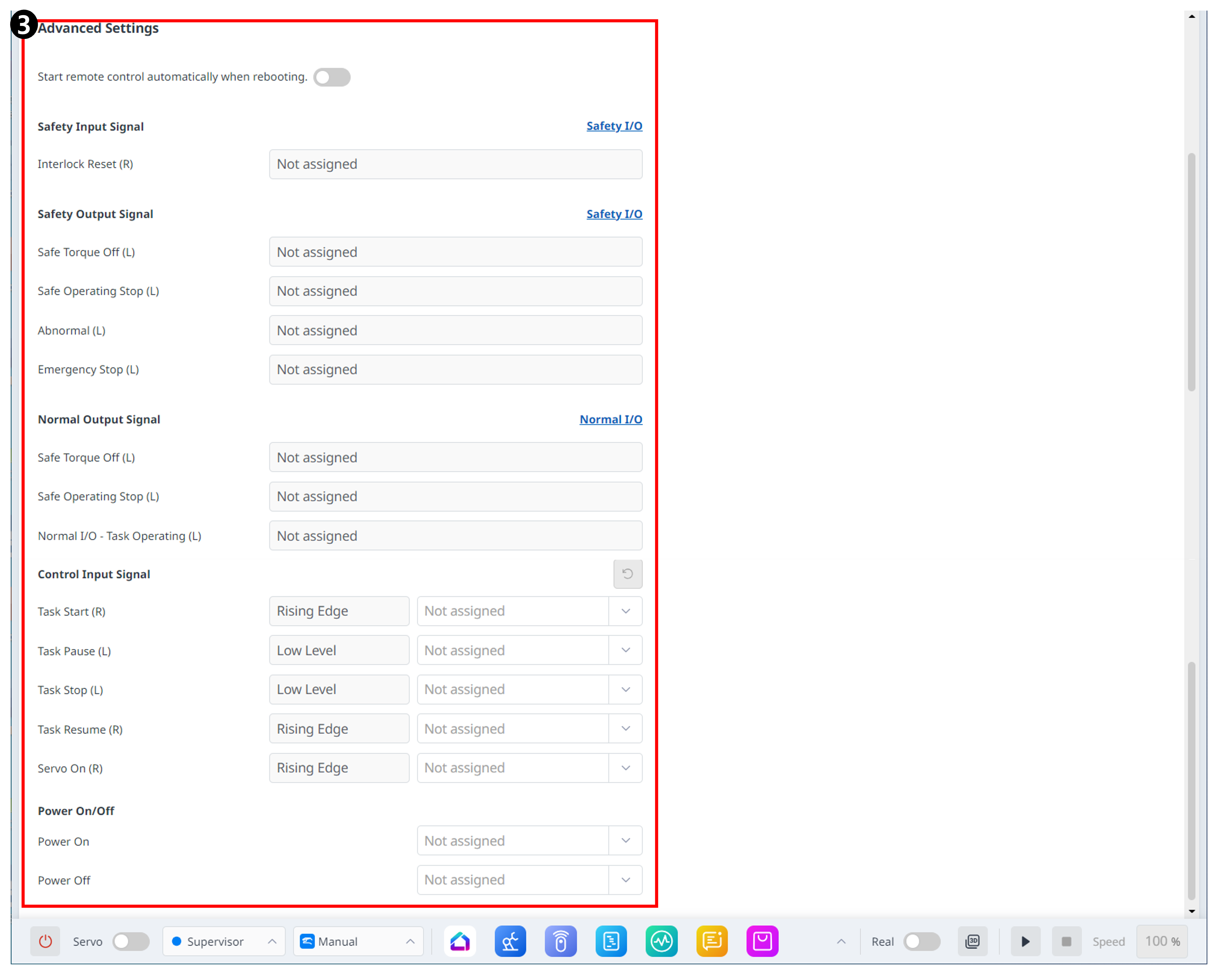
Erweiterte Einstellungen
Unter Erweiterte Einstellungen können Sie zusätzlich optionale Funktionen konfigurieren, die für den Fernbedienungsbetrieb erforderlich sind.
Diese Einstellungen sind optional. Wenn sie nicht konfiguriert sind, ist die grundlegende Fernbedienungsfunktion weiterhin verfügbar.
Starten Sie die Fernbedienung beim Neustart automatisch

Wenn die Umschalttaste auf EIN gestellt ist, wechselt das System nach dem Neustart des Roboters automatisch in den Bildschirm „Remote Control Mode“.
Erweiterte Signaleinstellungen
Alle folgenden Signale sind optional.
Allgemeine Vorsichtsmaßnahmen
Dies sind keine obligatorischen Elemente.
Der gleiche Port und das gleiche Signal können nicht redundant zugewiesen werden.
Sicherheitseingangssignal

Konfigurieren Sie das Interlock Reset-Signal für die Initialisierung angeschlossener Geräte.
Dies funktioniert identisch mit der Einstellung „Sperre zurücksetzen“ unter „Sicherheits-E/A“ > „Sperre zurücksetzen“ im Robot Parameter-Modul.
Sicherheitsausgangssignale
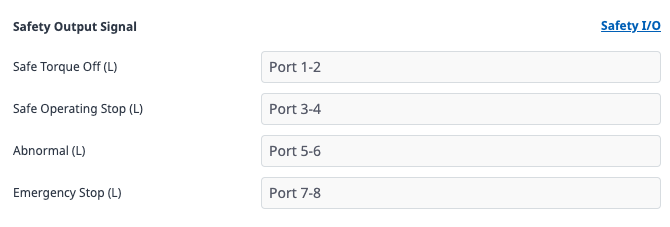
Sie können Ausgangsanschlüsse für STO-, SOS- und Not-aus-Signale zuweisen.
Wenn STO, SOS oder Not-aus bereits im Abschnitt Sicherheitsausgangssignale des Robot Parameter-moduls konfiguriert sind , gelten diese Einstellungen.
Hinweis
Ausführliche Informationen zu den einzelnen Signalen finden Sie im Abschnitt Sicherheitssignal E/A.
Normale Ausgangssignale
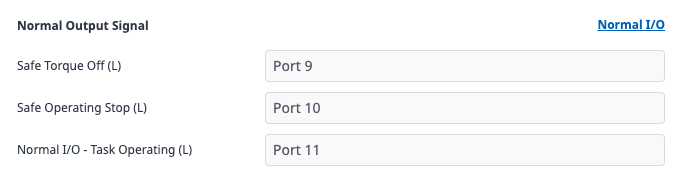
Sie können Ausgangsanschlüsse für STO-, SOS- und Task-Betriebssignale zuweisen.
Wenn die gleichen Signale bereits im Abschnitt Allgemeine Ausgangssignale des Moduls Robot Parameter konfiguriert sind, gelten diese Einstellungen.
Eingangssignale Steuern
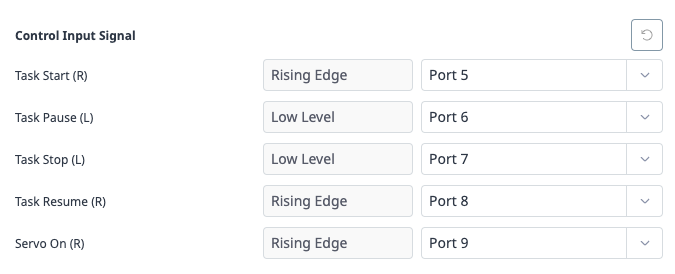
Sie können Eingabeanschlüsse für die Befehle Start, Stopp, Pause, Fortsetzen und Servo ein zuweisen.
Drücken Sie die Reset-Taste, um die Konfiguration des Steuereingangssignals zu löschen.
Ein-/Ausschalten

Sie können die Eingangsports für ein-/Ausschalten konfigurieren.
Die Beschreibung neben jedem Signalanschluss gibt den Betriebszustand dieses Signals an.
Flankenanstieg
Das Eingangssignal wird aktiviert, wenn es steigt.
Das Signal Task Start wird beispielsweise ausgelöst, wenn der Eingang von 0V auf 24V steigt.
Bei einem erneuten Versuch müssen Sie das Signal zunächst auf 0 V zurückstellen, bevor Sie es erneut erhöhen.
Low Level
Das Stopp-Signal hat Vorrang vor dem Start-Signal.
Wenn beispielsweise das Stopp-Signal auf einem niedrigen Niveau ist, wird das Task Start-Signal ignoriert und eine Meldung Remote IO Signal ignoriert wird angezeigt.