
Probieren Sie Compliance command samples aus
Vorsicht
Bevor Sie die Probe testen, müssen Sie die Vorsichtsmaßnahmen lesen und befolgen. Weitere Informationen finden Sie in TEIL 1. Sicherheitshandbuch.
Hinweis
Wenn beim Aktivieren oder Deaktivieren der Compliance Control ein externes Drehmoment über dem Schwellenwert liegt, stoppt der Roboter das Programm aufgrund des JTS-Fehlers (Joint Torque Sensor).
Die Steifigkeitsänderung kann unabhängig von der Größe des äußeren Drehmoments vorgenommen werden.
Während der Compliance-Kontrolle können Gelenkbewegungen, wie z. B. der Befehl „MoveJ“, nicht ausgeführt werden.
Schwellenwert für JTS-Fehler (Nm) | ||||||
Modell | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
E0509 | 15 | 15 | 15 | 15 | 15 | 15 |
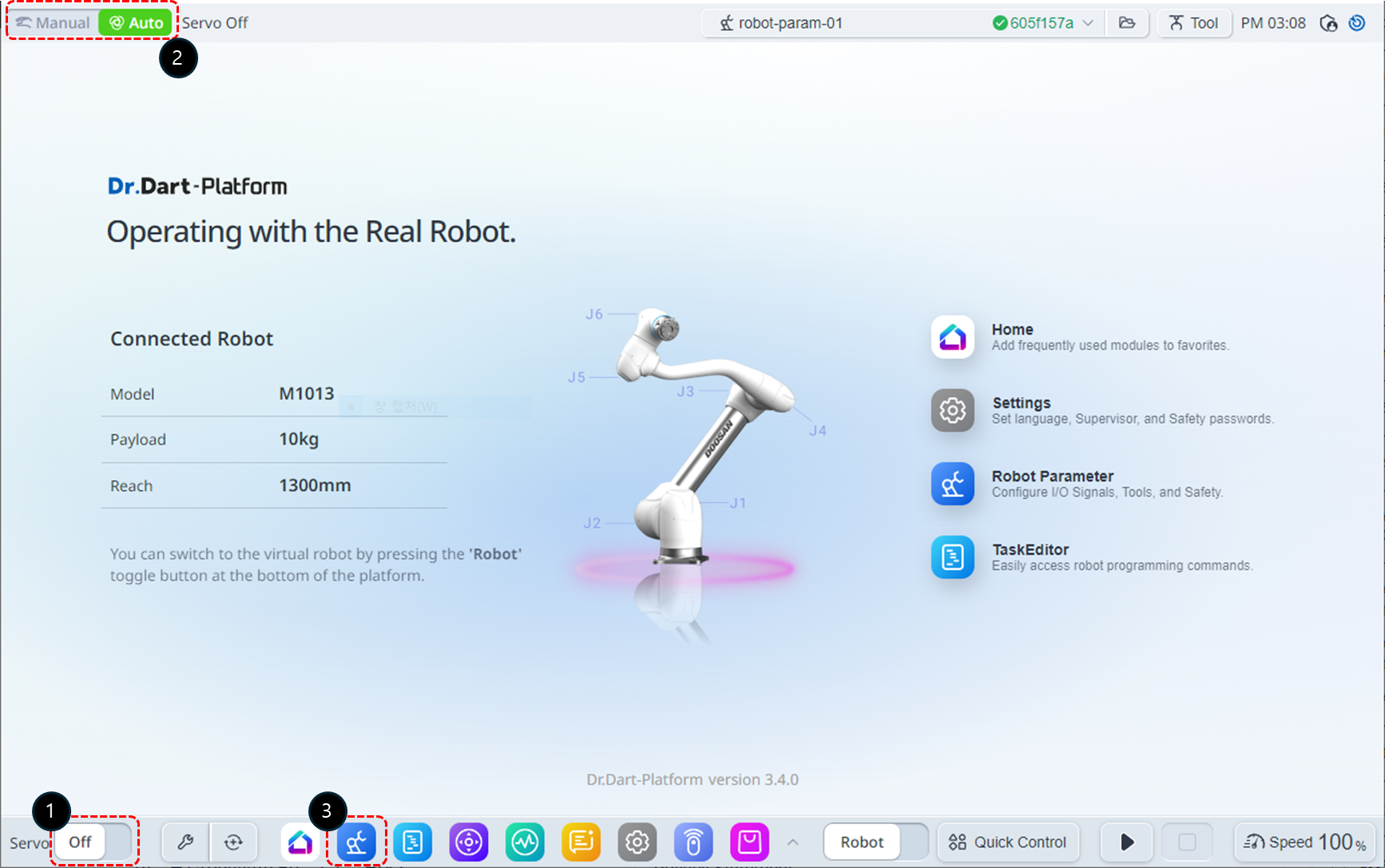
Stellen Sie den Servostatus auf ein.
Ändern Sie den Betriebsmodus auf manuell.
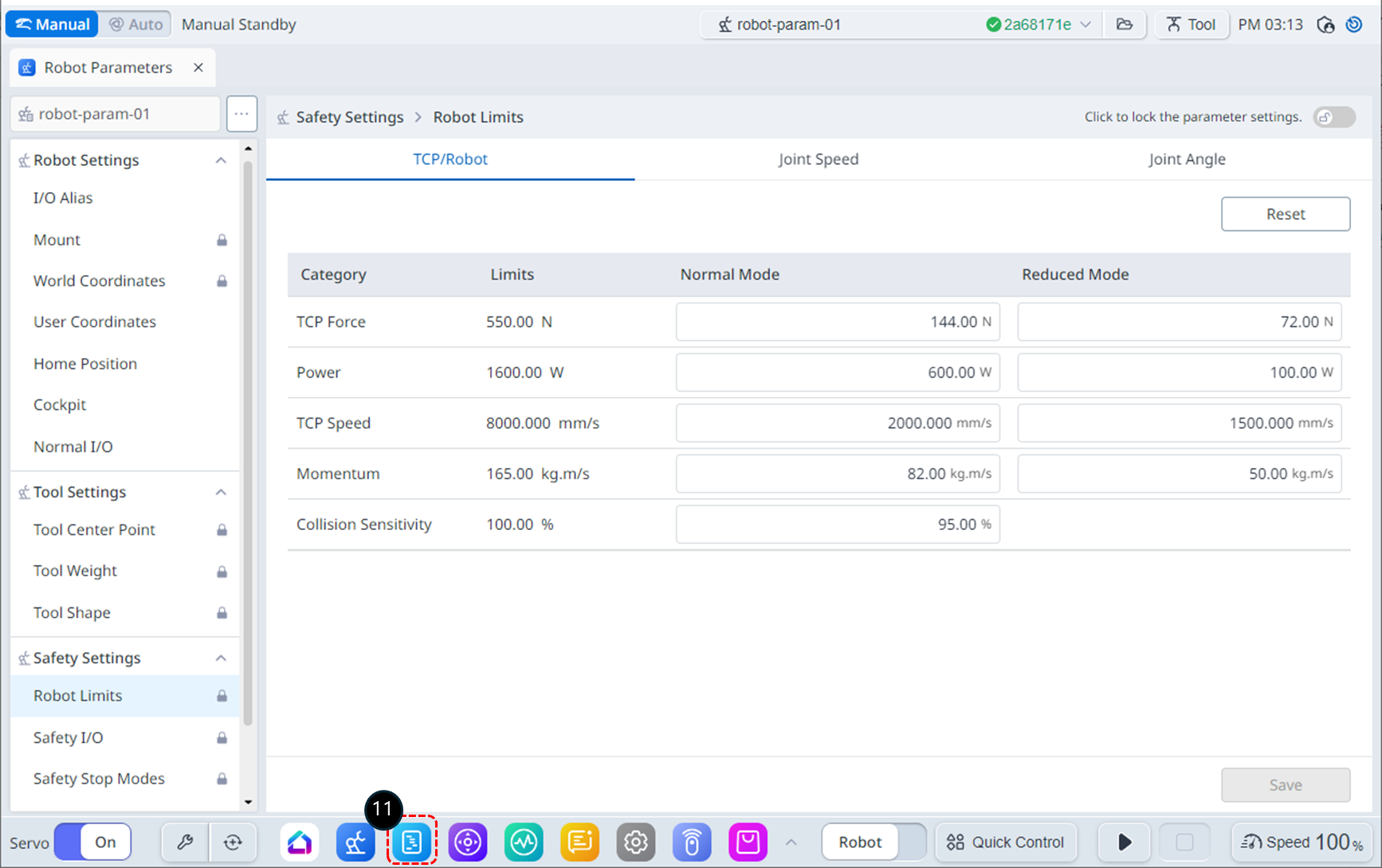
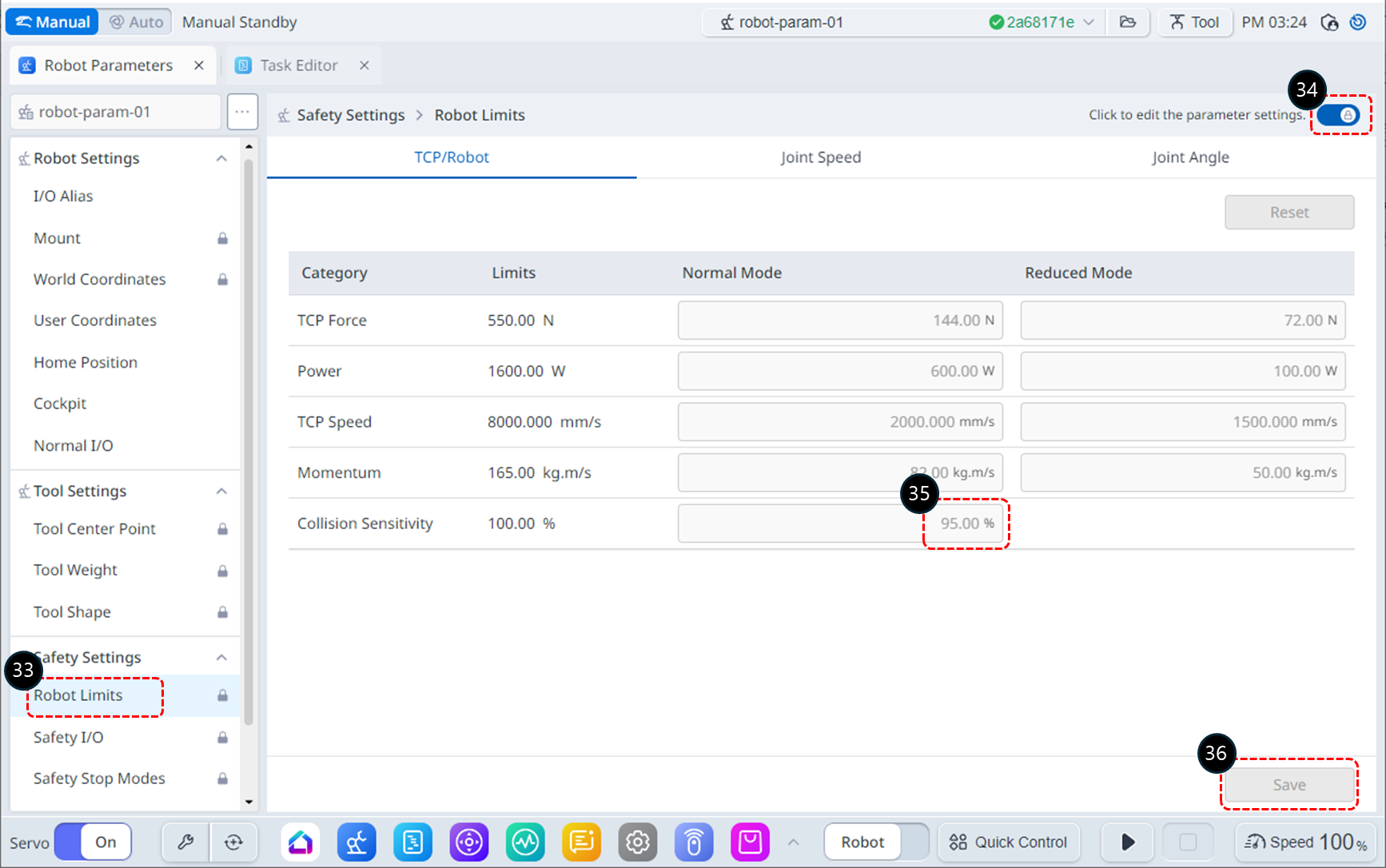
Wählen Sie im unteren Menü das Modul Roboterparameter aus. In diesem Beispiel ist die Kollisionsempfindlichkeit auf 95 % eingestellt, um den Grund für die Senkung der Kollisionsempfindlichkeit bei Verwendung der Compliance-Kontrolle zu erklären.
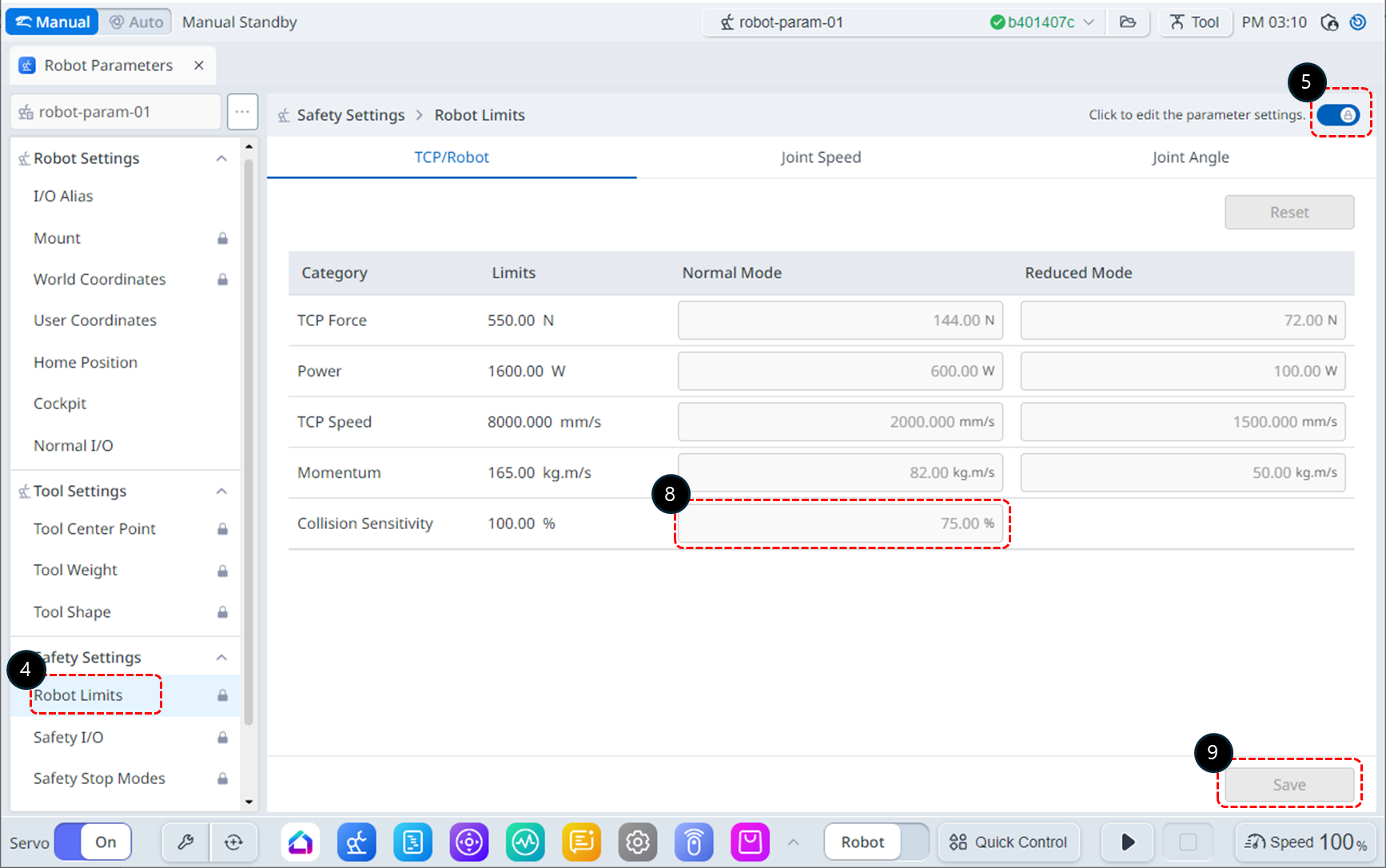
Wählen Sie unter Sicherheitseinstellungen die Option Robotergrenzen aus.
Aktivieren Sie den Bearbeitungsstatus des Parameters.
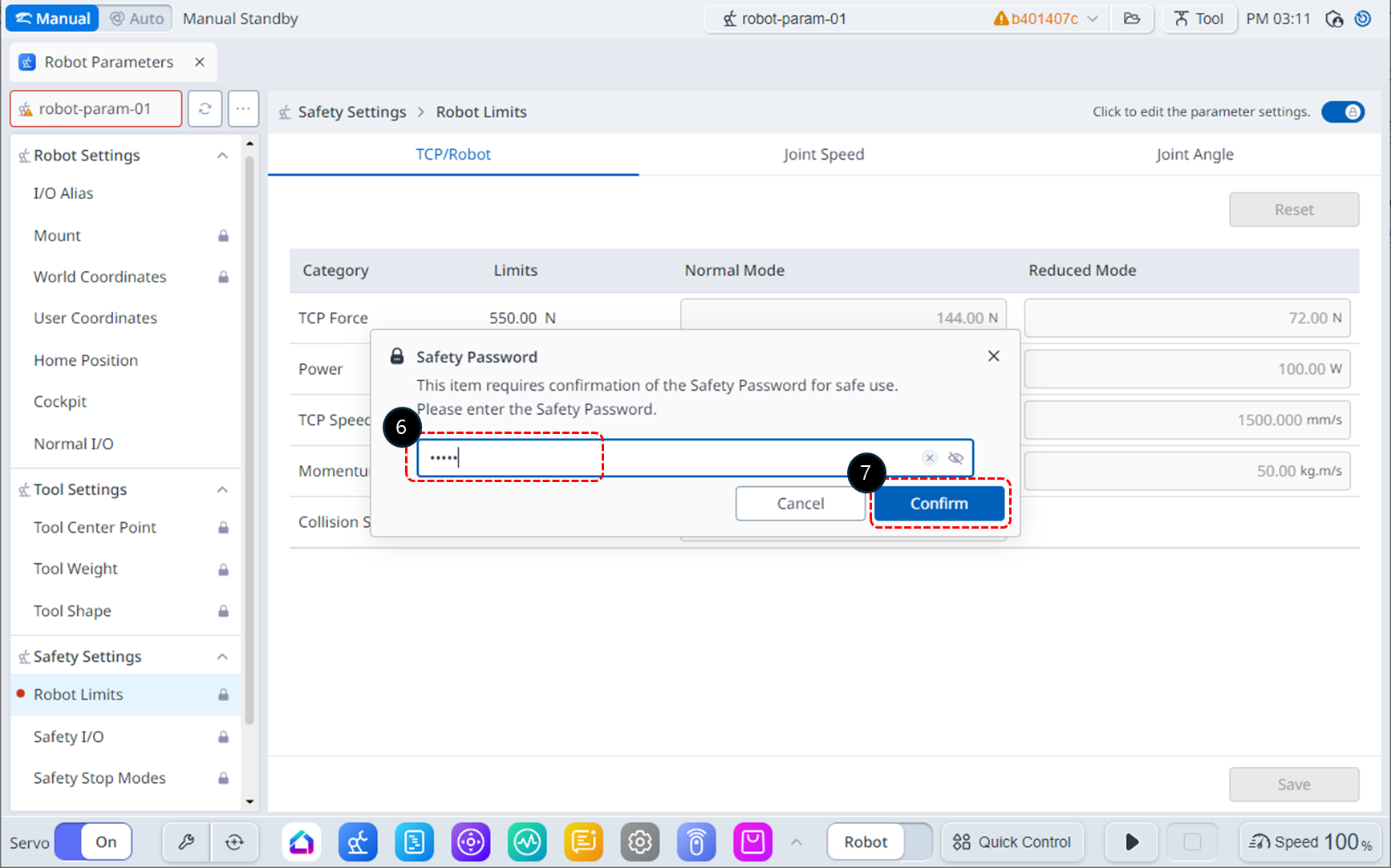
Wenn ein Fenster zur Eingabe des Kennworts angezeigt wird, geben Sie das Sicherheitskennwort ein (Standard-Sicherheitskennwort: admin).
Klicken Sie auf die Schaltfläche Bestätigen.
Ändern Sie die Kollisionsempfindlichkeit auf 95 %.
Klicken Sie auf die Schaltfläche Speichern, um die Einstellungen zu speichern.
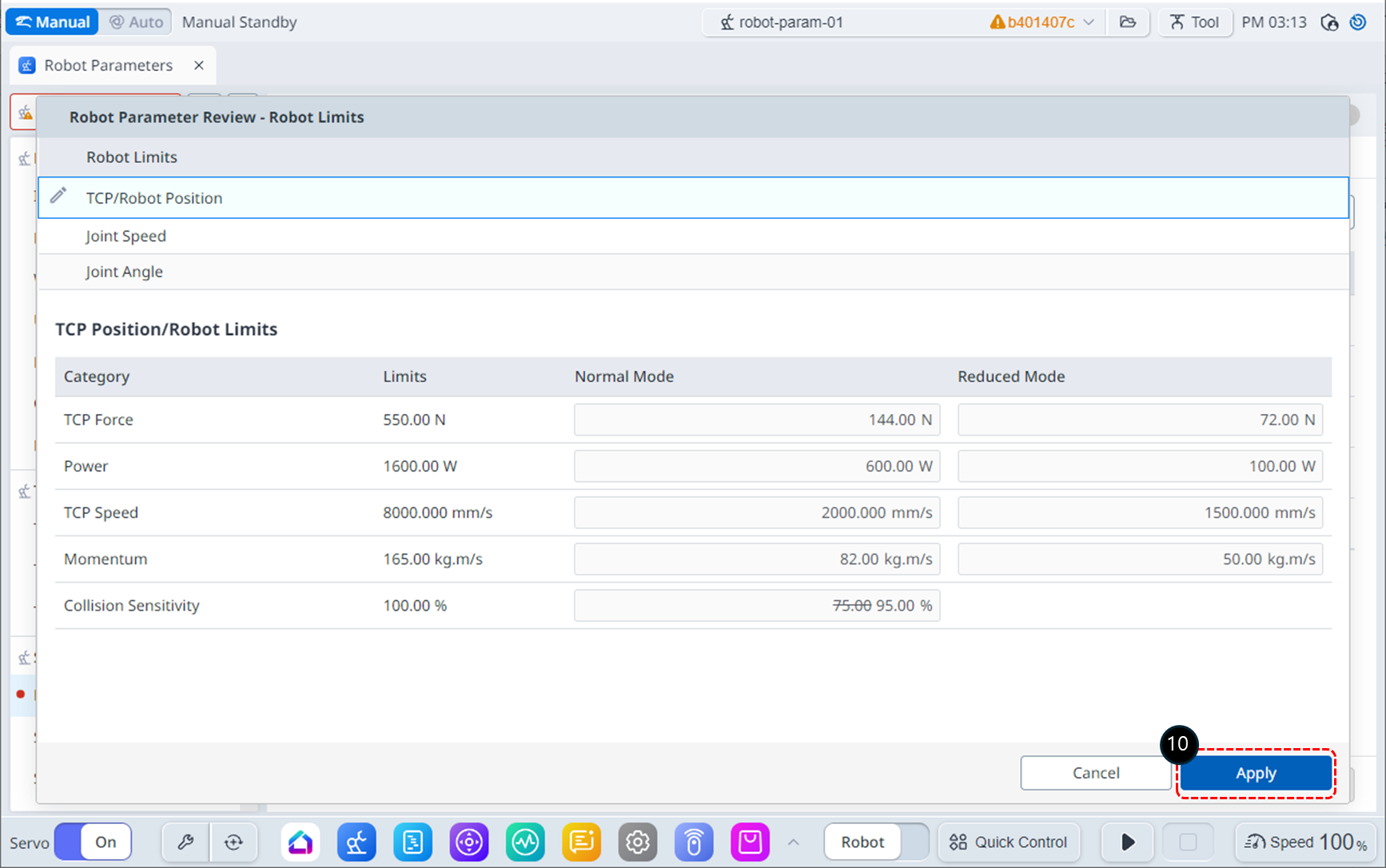
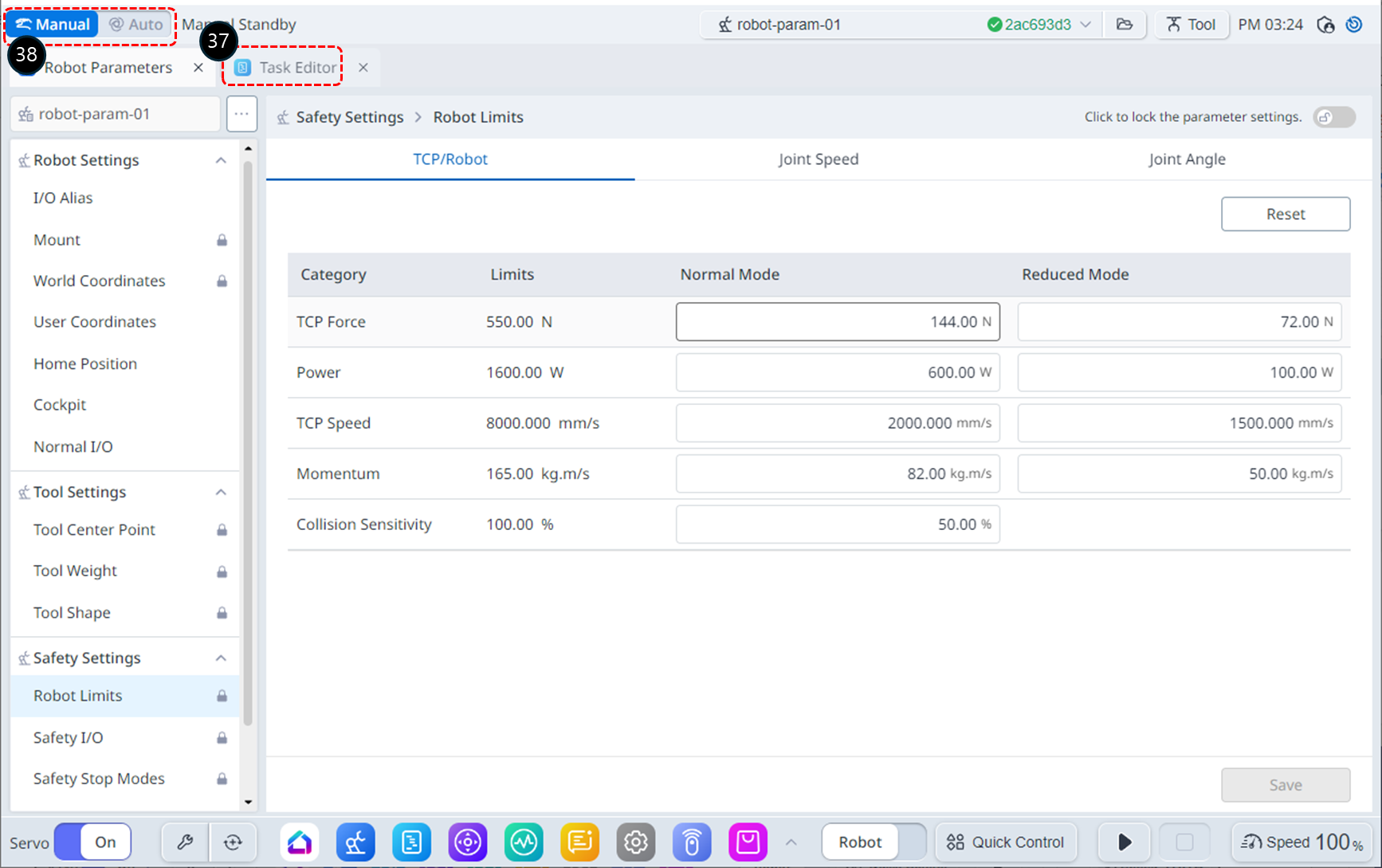
Nachdem Sie die Änderungen geprüft haben, klicken Sie auf die Schaltfläche Anwenden.
Wählen Sie im unteren Menü das Modul Task Editor aus.
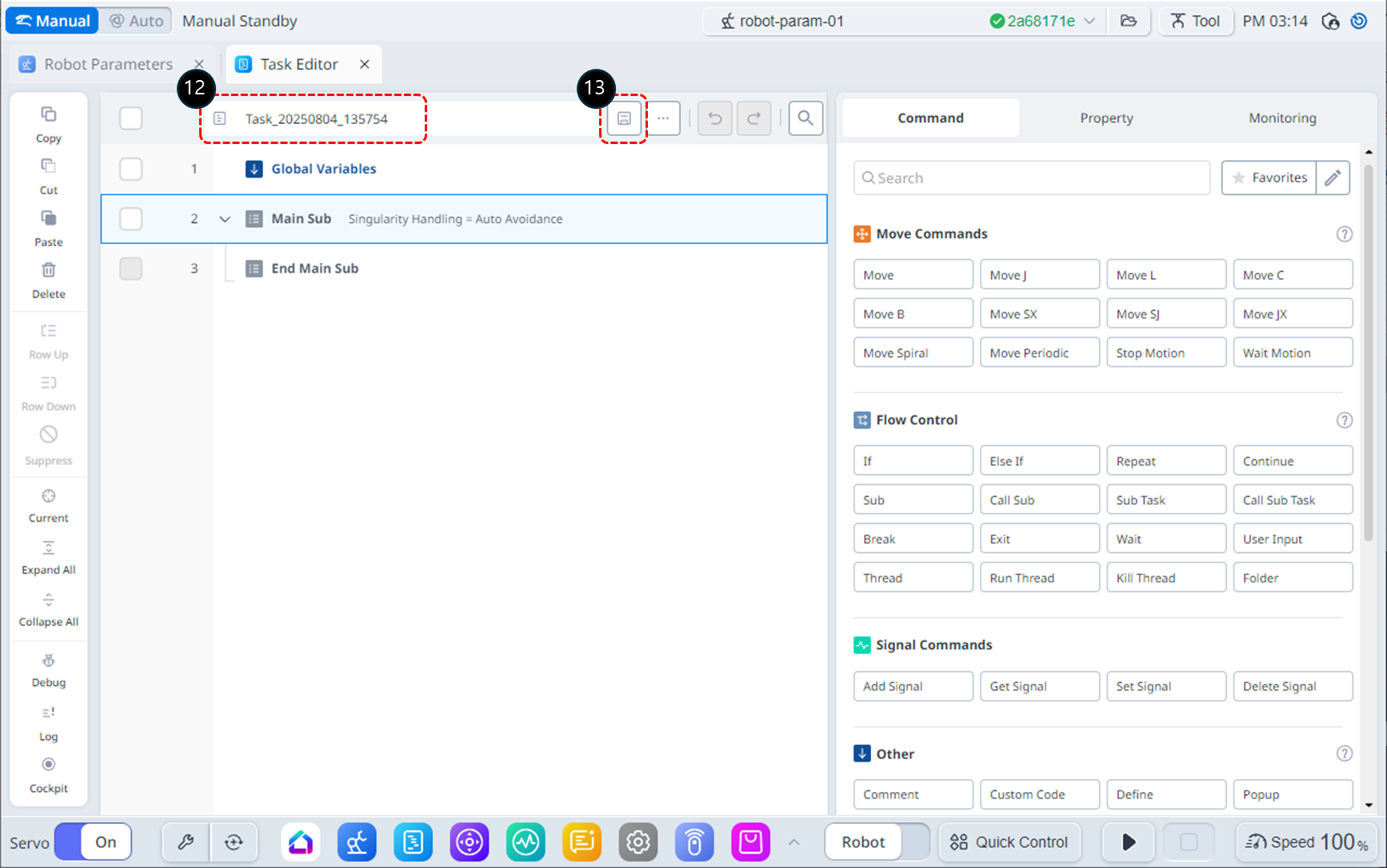
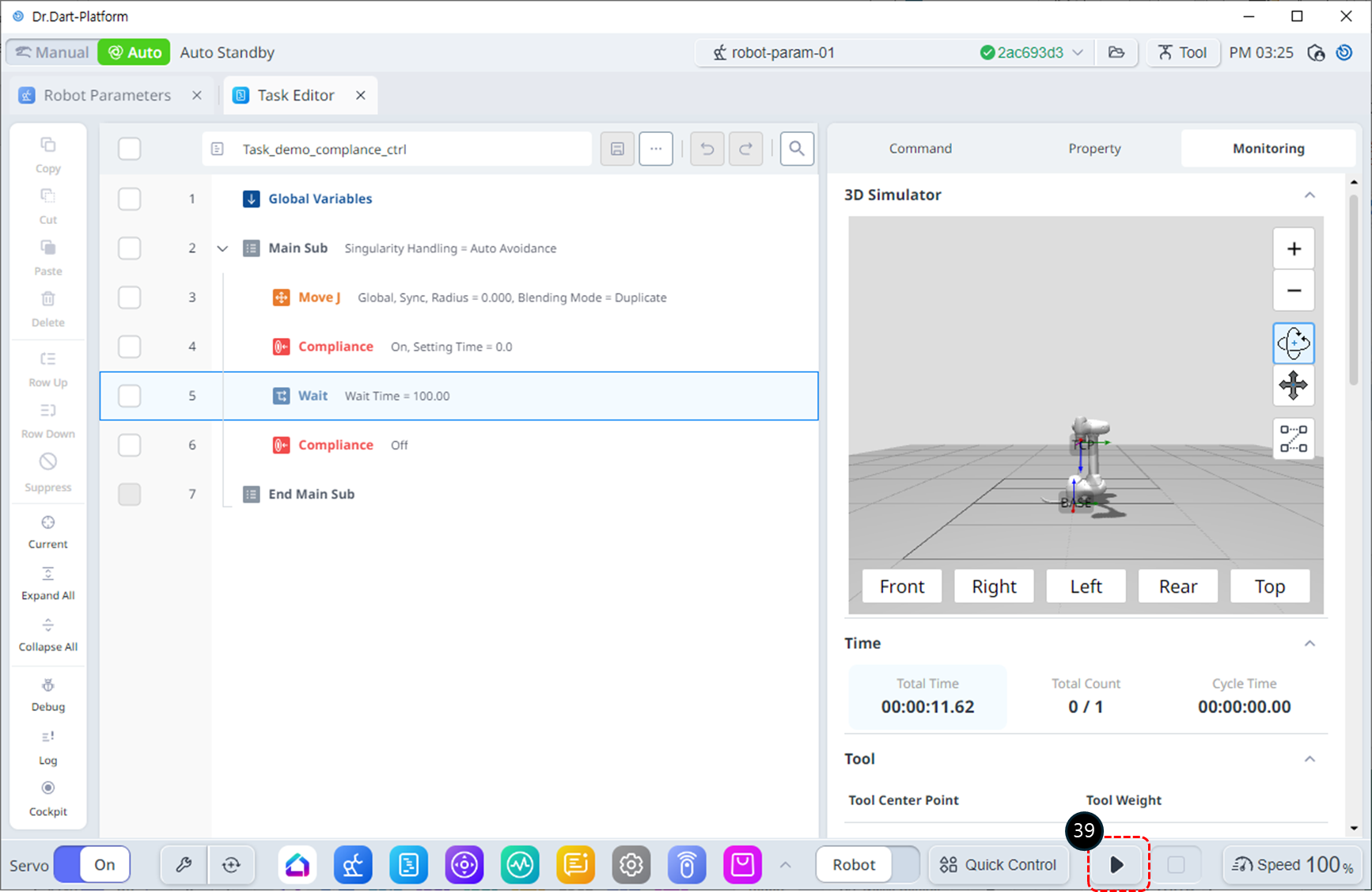
Benennen Sie die Aufgabe in task_demo_compliance_ctrl um.
Speichern Sie den aktualisierten Aufgabennamen.
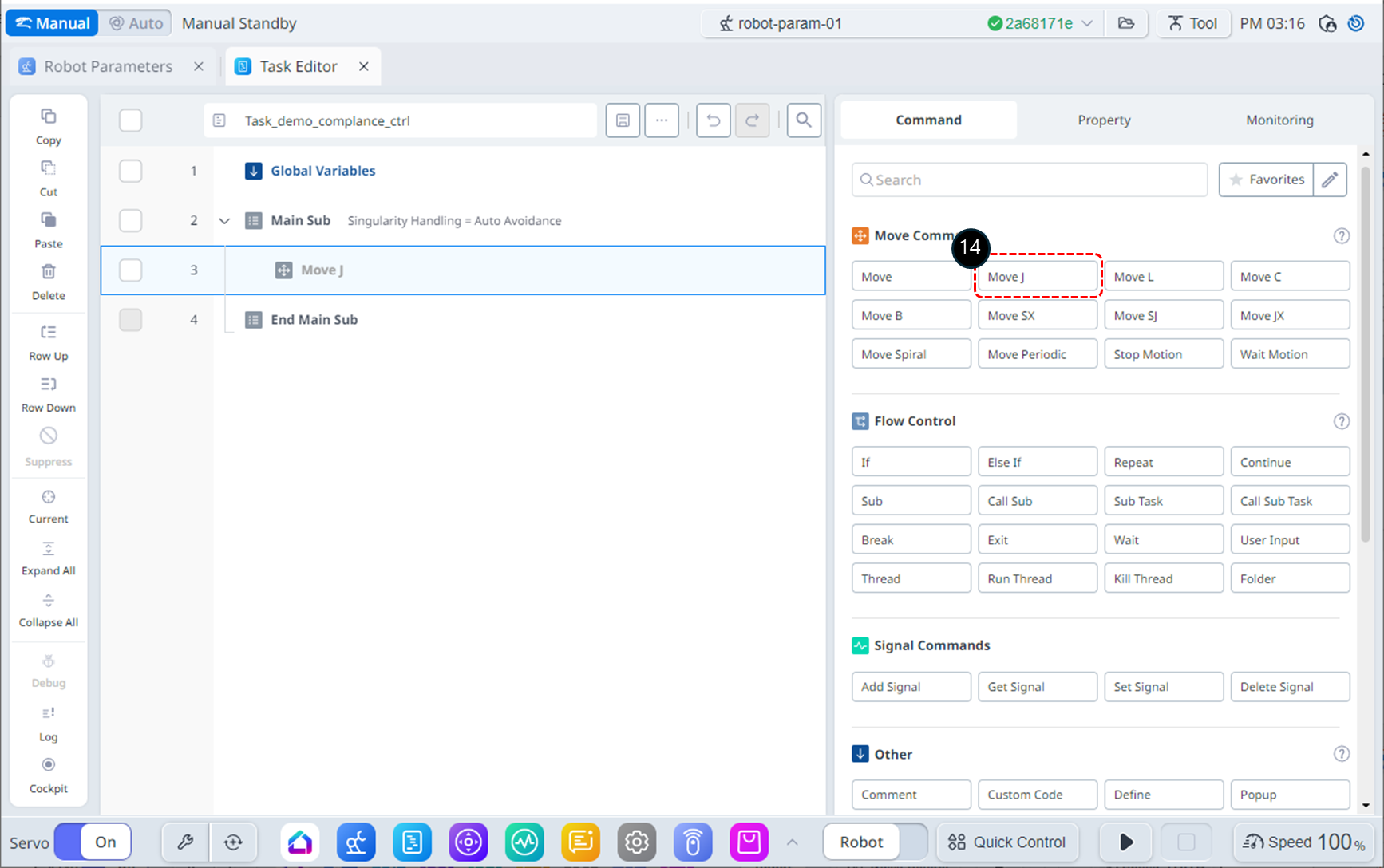
Fügen Sie den Befehl MoveJ hinzu. Dieser Befehl wird verwendet, um den Roboter in die Ausgangsposition für die Compliance-Kontrolle zu bewegen.
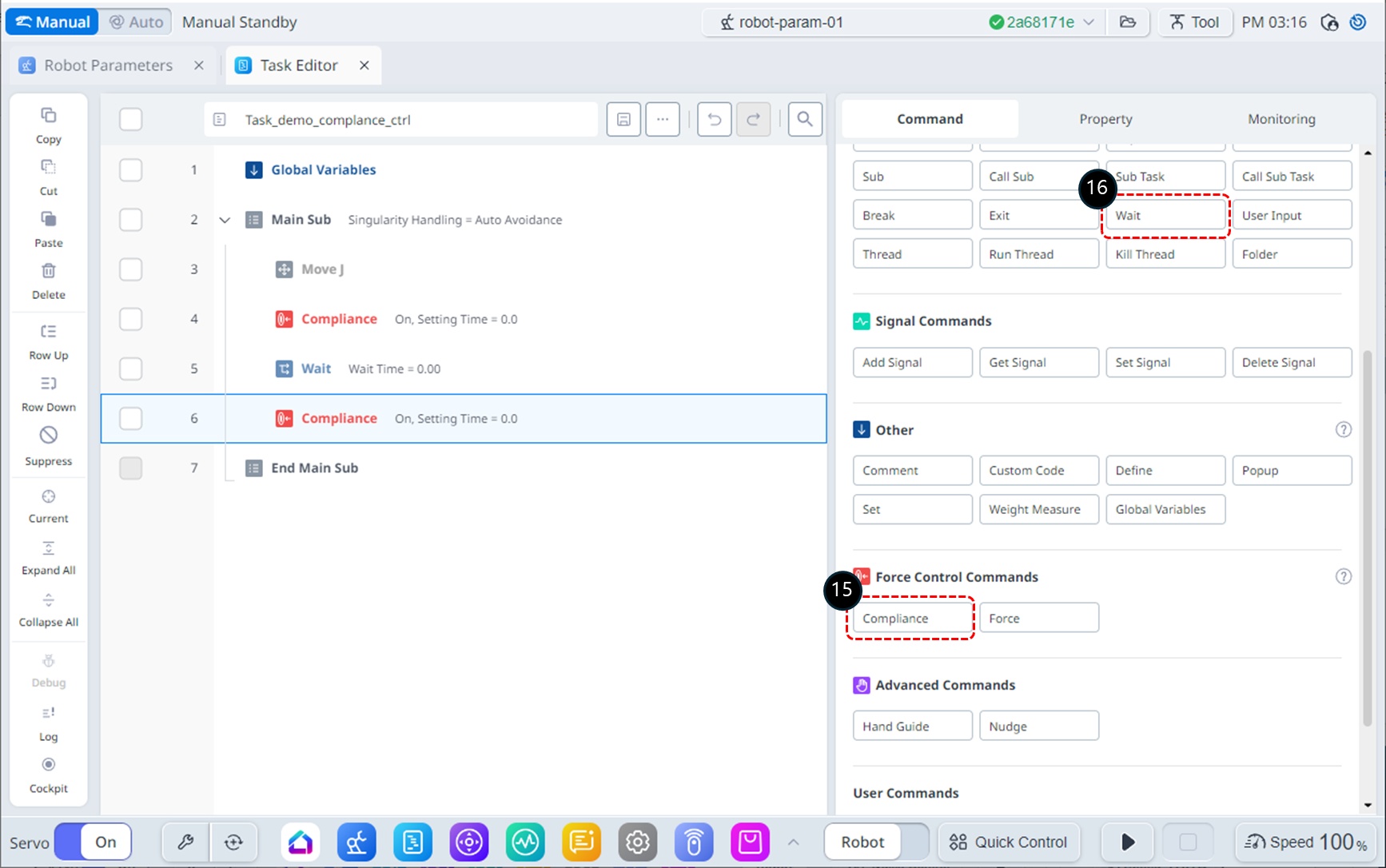
Fügen Sie zwei Compliance-Befehle hinzu. Diese Befehle werden zum Aktivieren und Deaktivieren der Compliance-Kontrolle verwendet.
Fügen Sie einen Befehl Warten zwischen den Befehlen Compliance ein. Dieser WAIT-Befehl wird verwendet, um die Compliance-Kontrolle aufrechtzuerhalten.
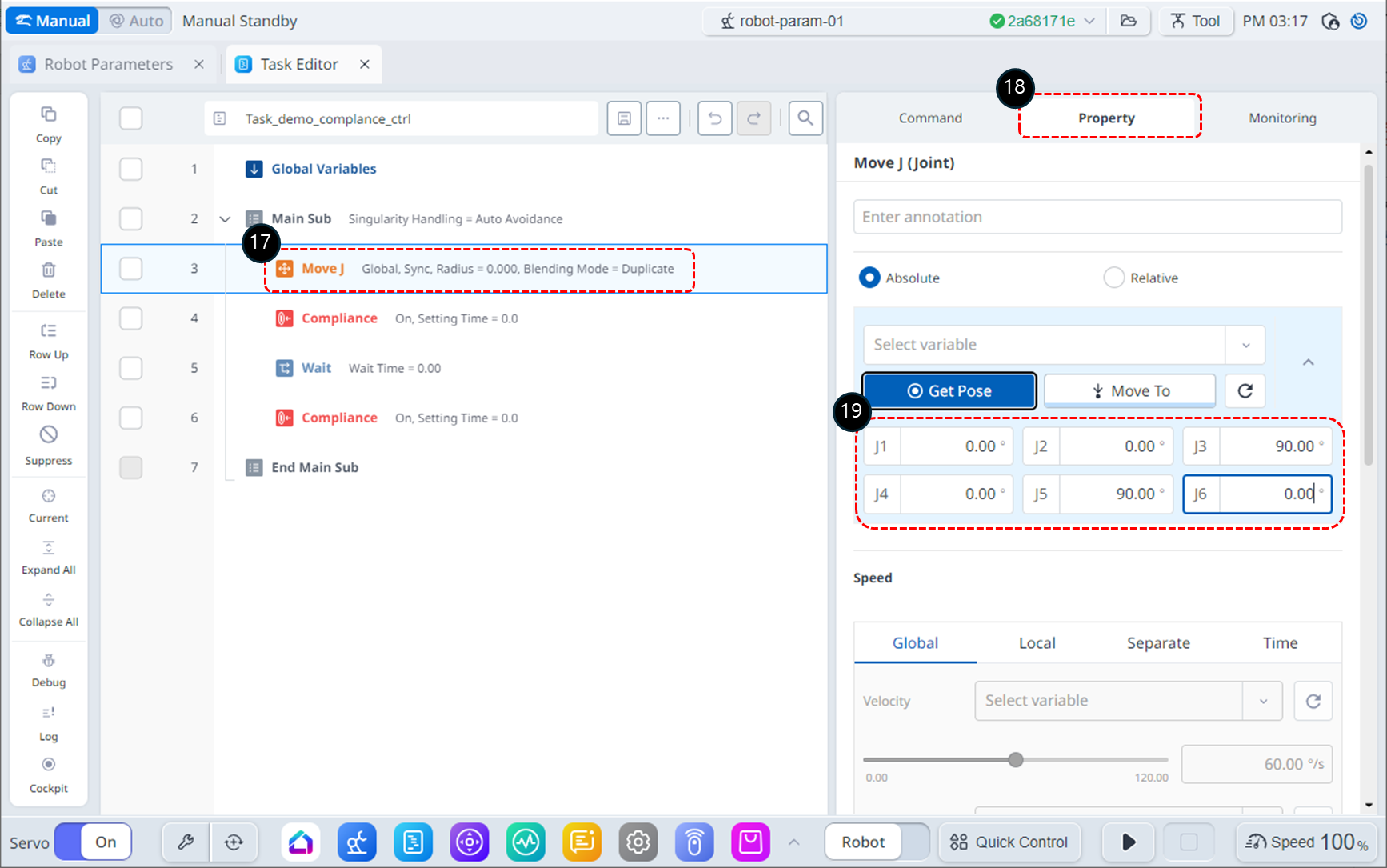
Wählen Sie den Befehl MoveJ in Zeile 3 aus.
Wählen Sie die Registerkarte Eigenschaft.
Ändern Sie die Zielposition von MoveJ auf (0, 0, 90, 0, 90, 0) Grad Je nach Einbauraum des Roboters kann der Winkel des J1 bei Bedarf angepasst werden.
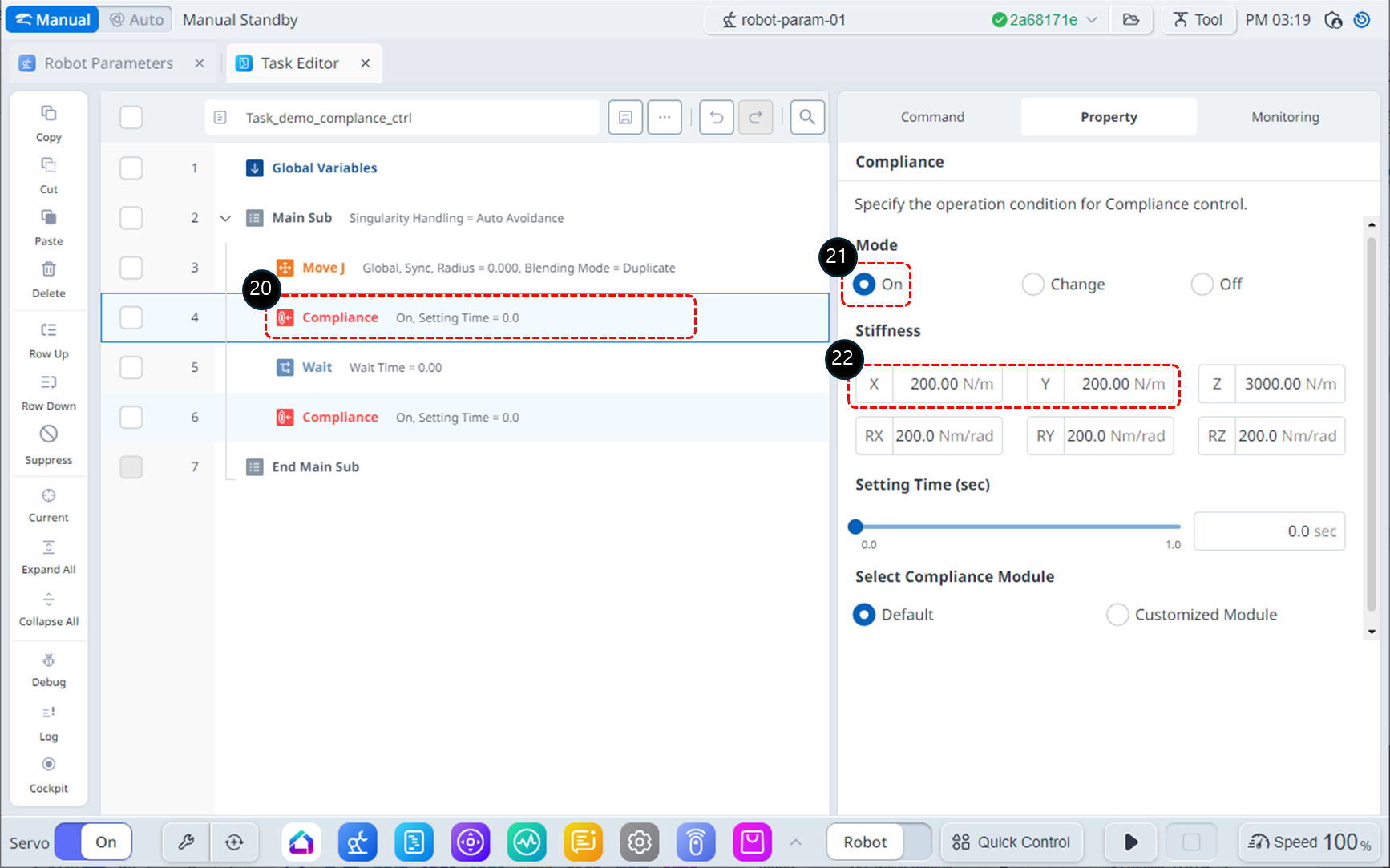
Wählen Sie den Befehl Compliance in Zeile 4 aus.
Legen Sie auf der Registerkarte Eigenschaft den Modus wie folgt fest: Modus ein aktiviert die Compliance-Kontrolle.
Modus: Ein
Legen Sie die Steifigkeit wie folgt fest: Verringern Sie die Steifigkeit in X- und Y-Richtung, damit der Roboter in diese Richtungen sanfter reagiert.
X: 200 N/m
Y: 200 N/m
Z: 3000 N/m (Standard)
Rx, Ry, Rz: 200 Nm/Rad (Standard)
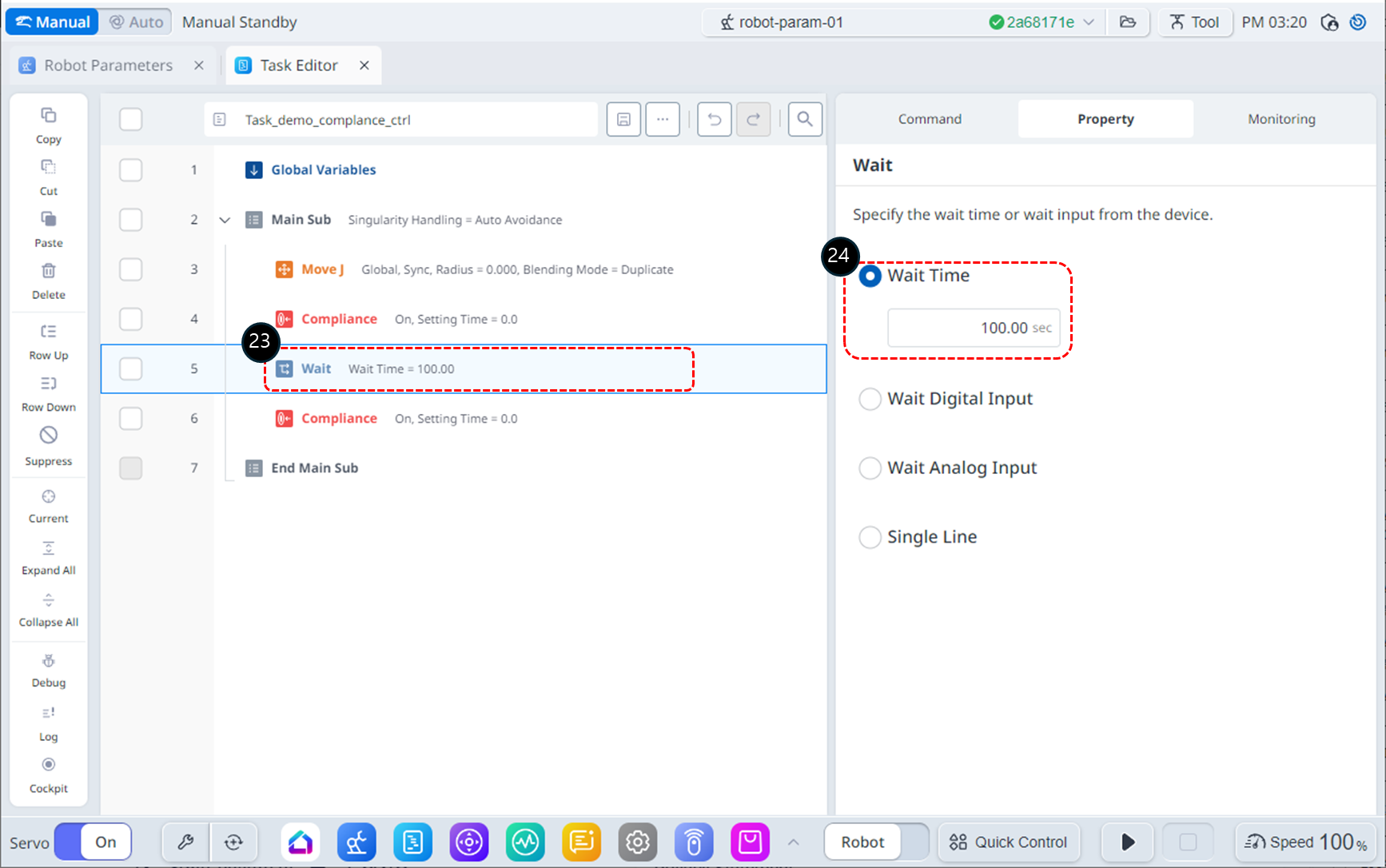
Wählen Sie den Befehl Warten in Zeile 5 aus.
Stellen Sie die Wartezeit wie folgt ein.
Wartezeit : 100 Sek
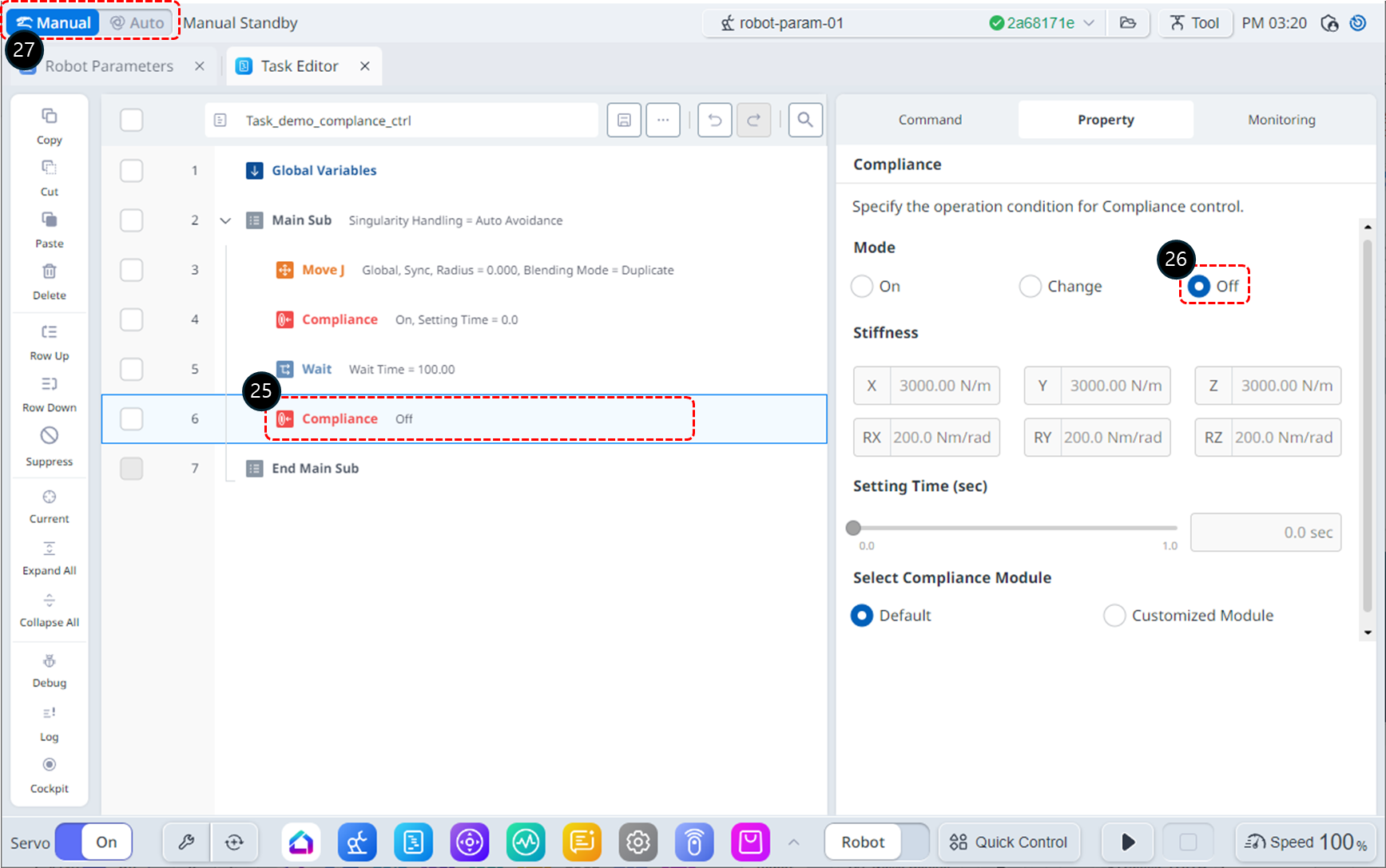
Wählen Sie den Befehl Compliance in Zeile 6 aus.
Legen Sie auf der Registerkarte Eigenschaft den Modus wie folgt fest: Modus aus deaktiviert die Compliance-Kontrolle.
Modus: Aus
Ändern Sie den Betriebsmodus auf Auto. Die Registerkarte Eigenschaft wechselt automatisch zur Registerkarte Überwachung.
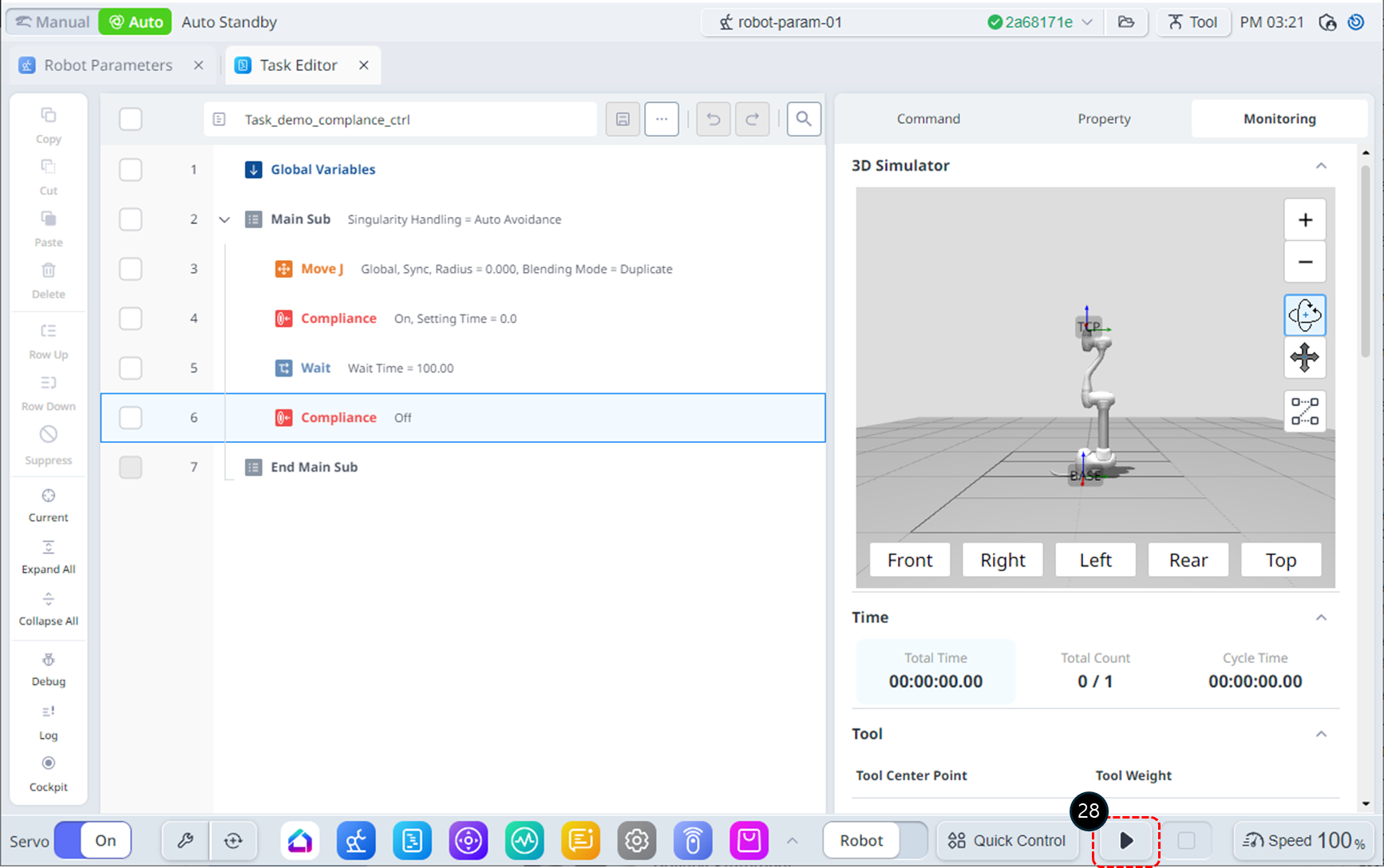
Klicken Sie auf die Schaltfläche Ausführen. Der Roboter bewegt sich in die Ausgangsposition, leitet die Compliance-Kontrolle ein und bleibt 100 Sekunden lang stehen. Drücken Sie während dieser Zeit den Endeffektor des Roboters vorsichtig in Richtung des Roboterkörpers. Der Roboter stoppt mit einem Kollisionsfehler (oder TCP Force Limit error). Im durch die Kollision verursachten Sicherheitsstopp leuchtet die LED des Roboters gelb.
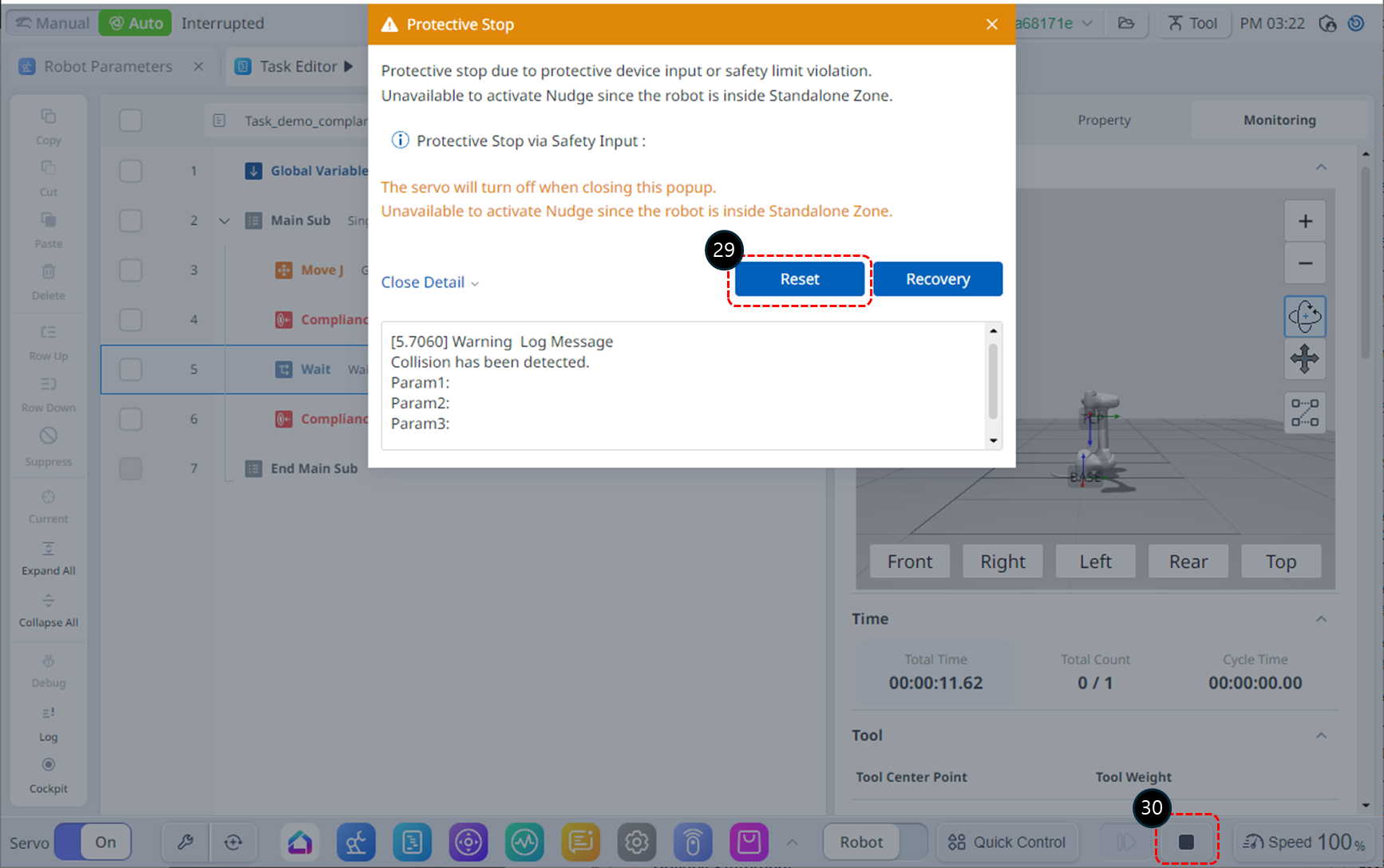
Klicken Sie auf die Schaltfläche Reset (Zurücksetzen) im Warnfenster Safety-Stop (Sicherheitsstopp). Das Aufgabenprogramm nimmt den Betrieb wieder auf.
Klicken Sie auf die Schaltfläche Stopp, um das Programm zu beenden.
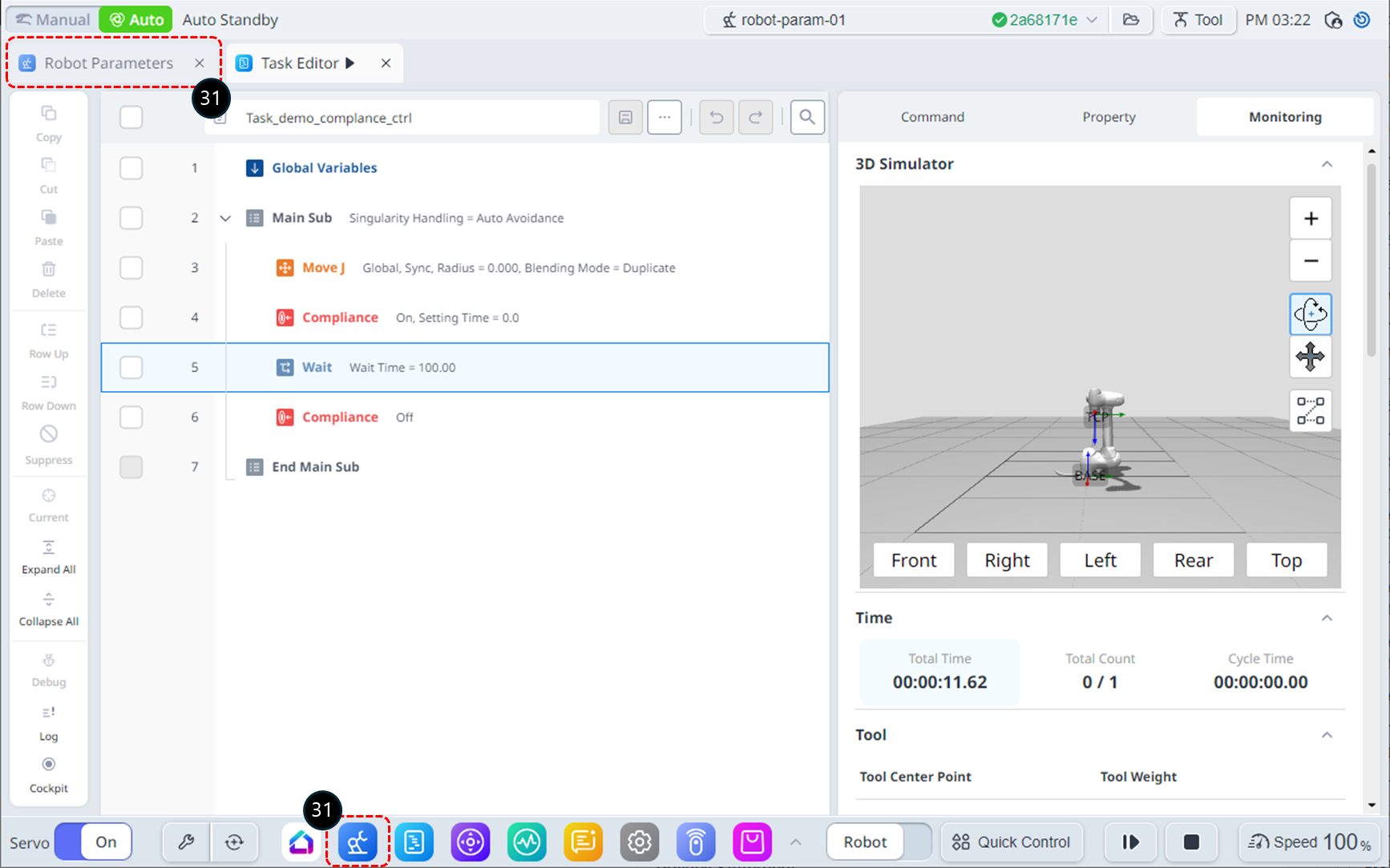
Um Kollisionsprobleme zu beheben, sollte die Kollisionsempfindlichkeit in den Sicherheitseinstellungen verringert werden. (Wenn es ein Problem mit dem TCP-Force-Grenzwert gibt, sollte der TCP Force-Parameter erhöht werden.) Wählen Sie im unteren Menü das Modul Roboterparameter aus. Alternativ können Sie die Registerkarte „Roboterparameter“ in der oberen linken Ecke auswählen, die genauso funktioniert.
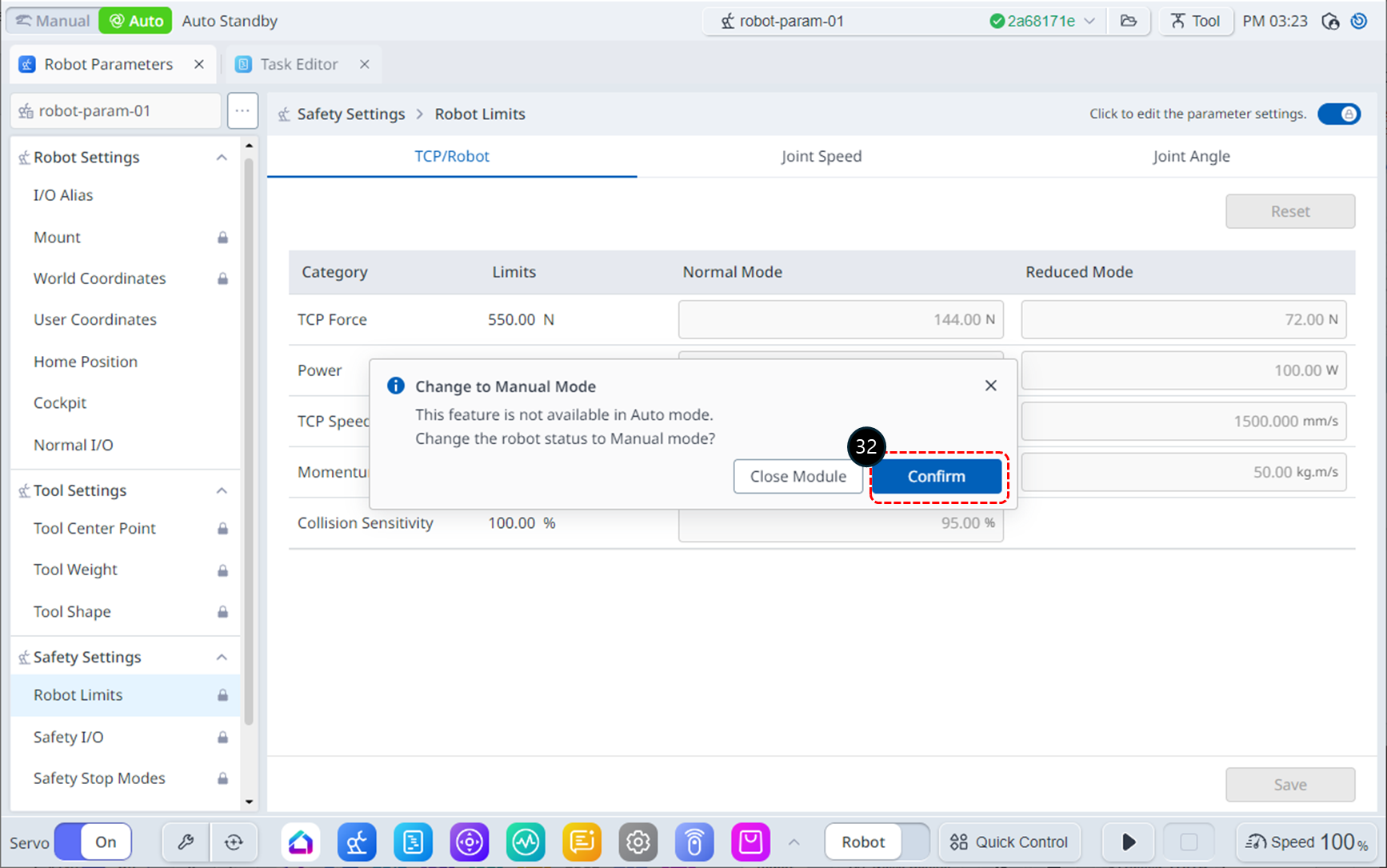
Im Modus Auto wird beim Zugriff auf das Modul Roboterparameter ein Benachrichtigungsfenster ausgelöst. Klicken Sie auf die Schaltfläche Bestätigen, um in den manuellen Modus zu wechseln.
Wählen Sie unter Sicherheitseinstellungen die Option Robotergrenzen aus.
Aktivieren Sie den Bearbeitungsstatus des Parameters. Wenn ein Fenster zur Eingabe des Kennworts angezeigt wird, befolgen Sie die Schritte 6–7.
Ändern Sie die Kollisionsempfindlichkeit auf 50 %.
Klicken Sie auf die Schaltfläche Speichern, um die Einstellungen zu speichern. Wenn das Fenster Prüfung der Roboterparameter angezeigt wird, prüfen Sie die Änderungen, und klicken Sie auf die Schaltfläche Anwenden.
Wählen Sie die Registerkarte Task-Editor-Modul aus.
Wechseln Sie in den Auto-Modus, um das Task-Programm auszuführen.
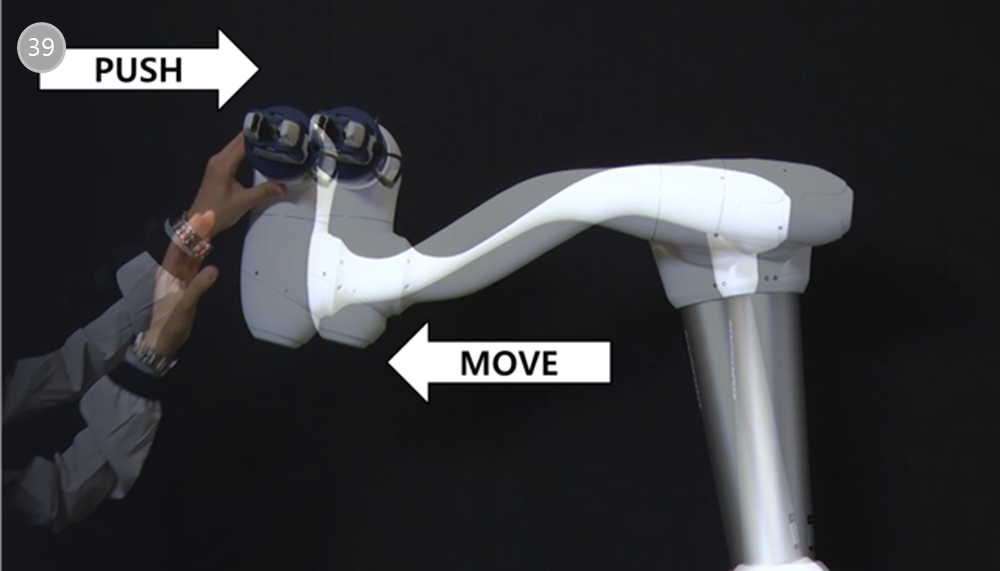
Klicken Sie auf die Schaltfläche Ausführen. Drücken Sie während der Wartezeit den Endeffektor des Roboters vorsichtig in Richtung des Roboterkörpers. Der Roboter bewegt sich aufgrund der Schubkraft, und sobald Sie Ihre Hand loslassen, kehrt er in seine ursprüngliche Position zurück.