Nastavení mezerního limitu
Položka pracovní buňky limitu prostoru nastavuje virtuální hranici v nejvzdálenější zóně robota. Robot může být provozován bez nastavení mezerních hodnot, ale doporučuje se nastavit limity prostoru pro zajištění bezpečného provozu robota.
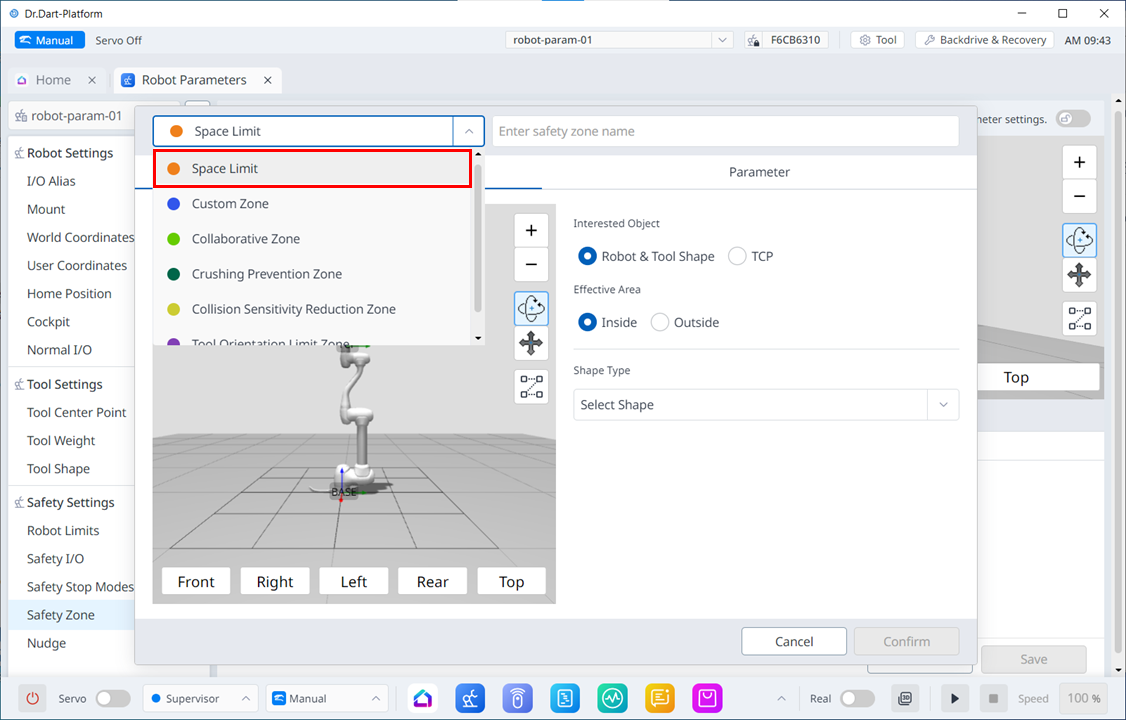
Mezerník lze dosáhnout v rozevírací nabídce vlevo nahoře v parametrech robota > Nastavení bezpečnosti > pracovní prostory pro bezpečnost > Přidat nový pracovní prostora pod položkou Typ tvaru můžete nastavit Sphere, Cylinder, Cube, Tilted Cuboid nebo polyhedron.
- Kontrolní bod lze nastavit jako robot nebo TCP a platný prostor lze nastavit jako vnitřní nebo vnější.
- Monitorovací zóna může být nastavena jako robot nebo TCP. Určuje, zda má být detekován vnitřní nebo vnější zóna, nebo ne.
- Výchozí hodnota je celá zóna a nastavený interiér.
- Po umístění robota do nastavené bezpečnostní zóny může být robot správně nastaven.
Chcete-li nastavit limit prostoru pro robota, v části pracovní prostory pro bezpečnost klepněte na tlačítko Přidat nový pracovní prostor a v části Typ tvaru vyberte jeden z následujících typů: Krychle, válec , Vícerovinný box, koule, nebo nakloněný Cuboid. Bezpečnostní heslo je vyžadováno při nastavení a aktivaci.