Zkuste vynutit vzorky příkazů
VOLITELNÉ NORMÁLNÍ 20 MIN

Tento vzorek je vytvořen v aplikaci Task Writer. Tento vzorek lze vyzkoušet téměř stejným způsobem v nástroji Task Builder.
Pozor
- Před zkoušením vzorku si přečtěte a dodržujte Upozornění při použití. Další informace naleznete ČÁST 1. Bezpečnostní příručkav části .
- Tento vzorek vyžaduje soubor aplikace Task Writer vytvořený v Vyzkoušejte vzorky příkazů Complianceaplikaci .
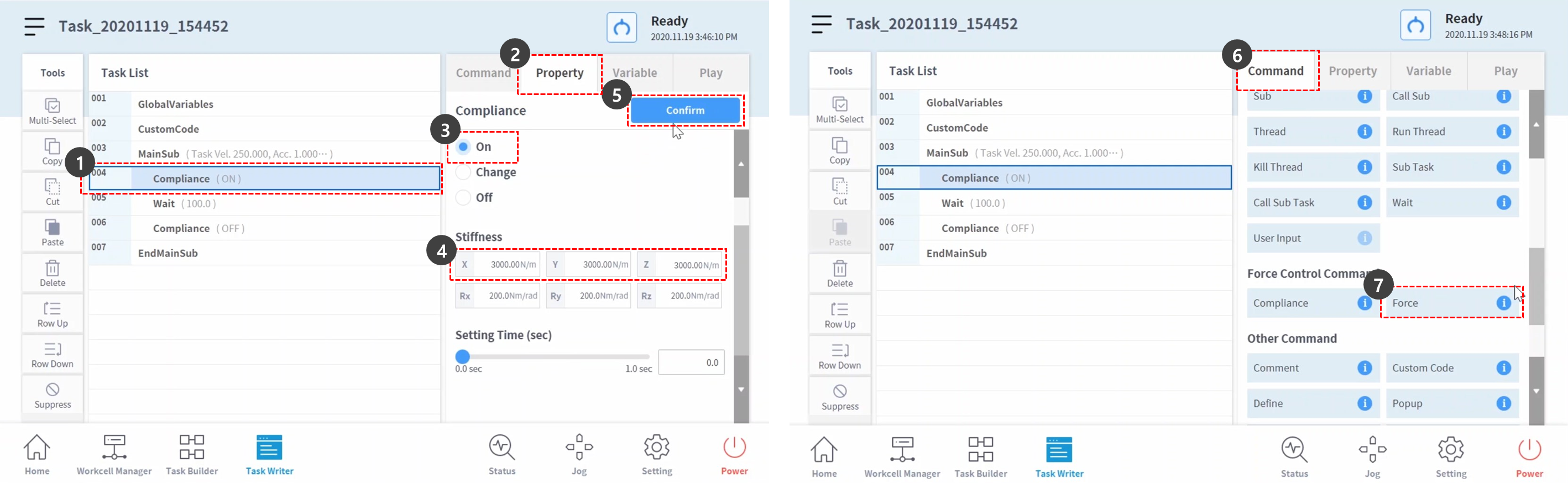
- Vyzkoušejte vzorky příkazů Compliance Otevřete vytvořený soubor aplikace Task Writer a na čtvrtém řádku seznamu úloh vyberte příkaz compliance.
- Vyberte kartu vlastnost.
- Nastavte režim následujícím způsobem: Režim ZAPNUTO umožňuje kontrolu konformity. Příkaz Vynutit je k dispozici pouze v případě, že je povoleno řízení souladu.
- Režim: ZAP
- Nastavte výchozí hodnotu tuhosti následujícím způsobem:
- X, Y, Z: 3000 N/m (výchozí)
- Rx, Ry, Rz: 200 Nm/rad (výchozí)
- Stiskněte tlačítko Potvrdit.
- Vyberte kartu příkaz.
- Přidejte příkaz síla. Tento příkaz je plánován pro aktivaci řízení síly.
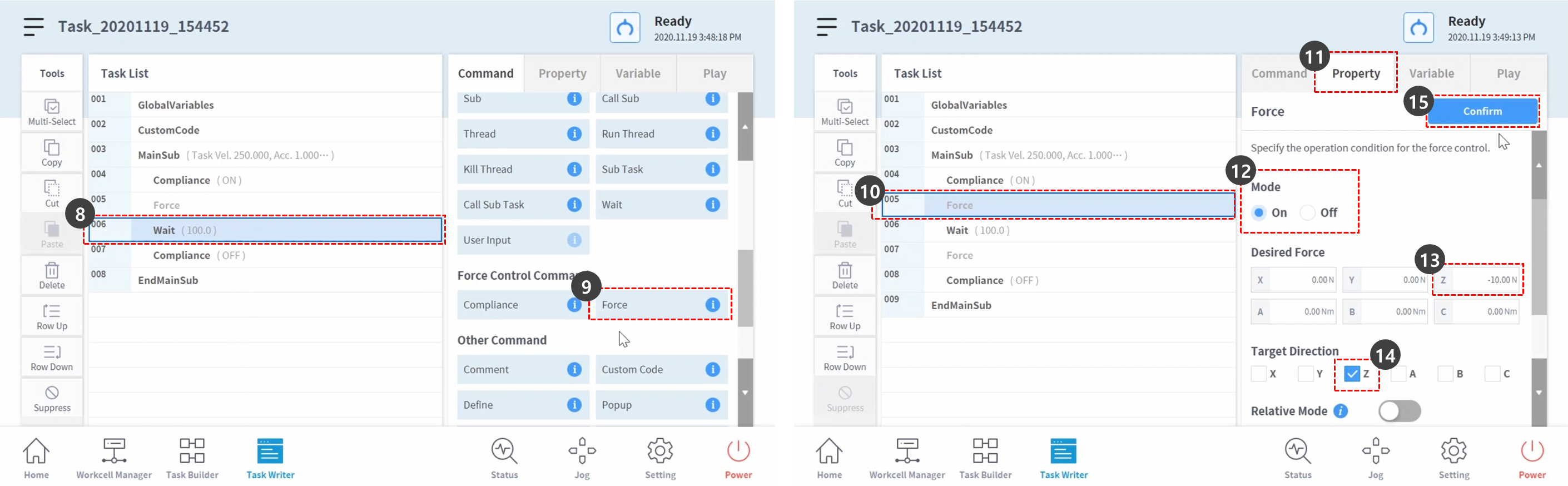
- Vyberte šestý řádek seznamu úkolů.
- Přidejte příkaz síla. Tento příkaz se plánuje použít pro deaktivaci řízení síly.
- Vyberte příkaz síla z pátého řádku seznamu úkolů.
- Vyberte kartu vlastnost.
- Nastavte režim následujícím způsobem: Režim ZAPNUTO umožňuje řízení síly.
- Režim: ZAP
- Nastavte požadovanou sílu následujícím způsobem:
- X: 0 N (výchozí)
- Y: 0 N (výchozí)
- Z: -10 S.
- Rx, Ry, Rz: 200 Nm/rad (výchozí)
- Zkontrolujte pouze osu z ve směru cíle.
- Stiskněte tlačítko Potvrdit.
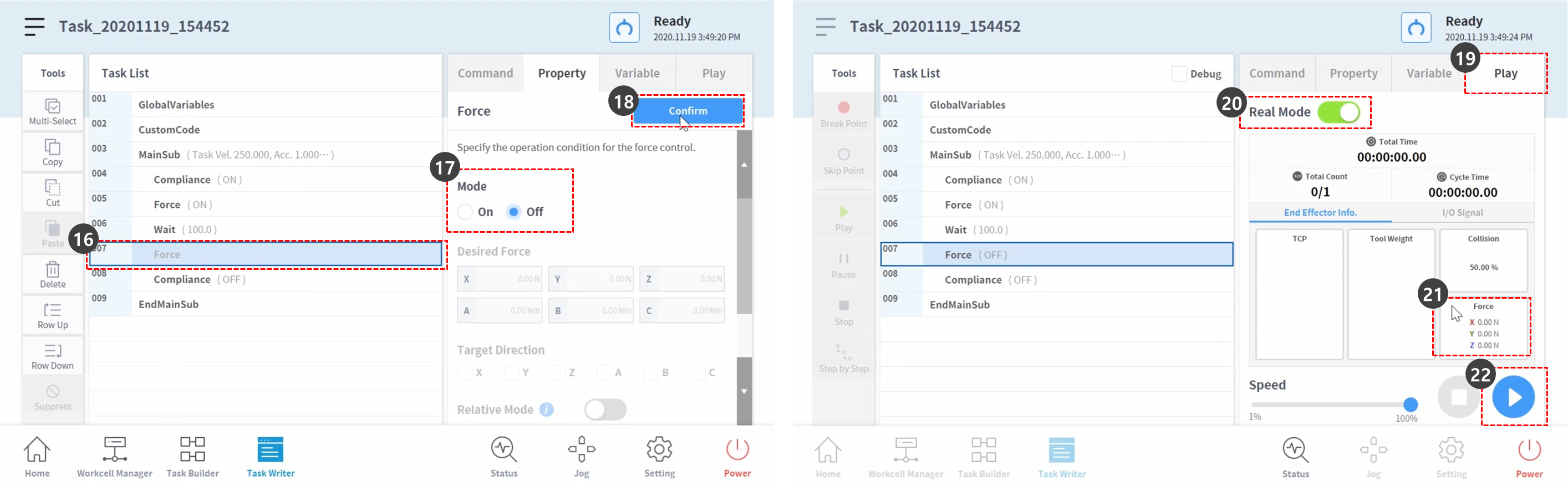
- Vyberte příkaz Vynutit ze sedmého řádku seznamu úkolů.
- Nastavte režim následujícím způsobem: Režim vypnutý deaktivuje řízení síly.
- Režim: Vypnuto
- Stiskněte tlačítko Potvrdit.
- Vyberte kartu Přehrát.
- Aktivujte přepínací tlačítko reálného režimu.
- Jakmile se přepínací tlačítko aktivuje, tlačítko se rozsvítí zeleně.
- Zkontrolujte, zda je síla TCP každé osy 0. Tato hodnota síly je velikost vnější síly aktuálně použité na konci TCP robota.
- Stiskněte tlačítko Přehrát.
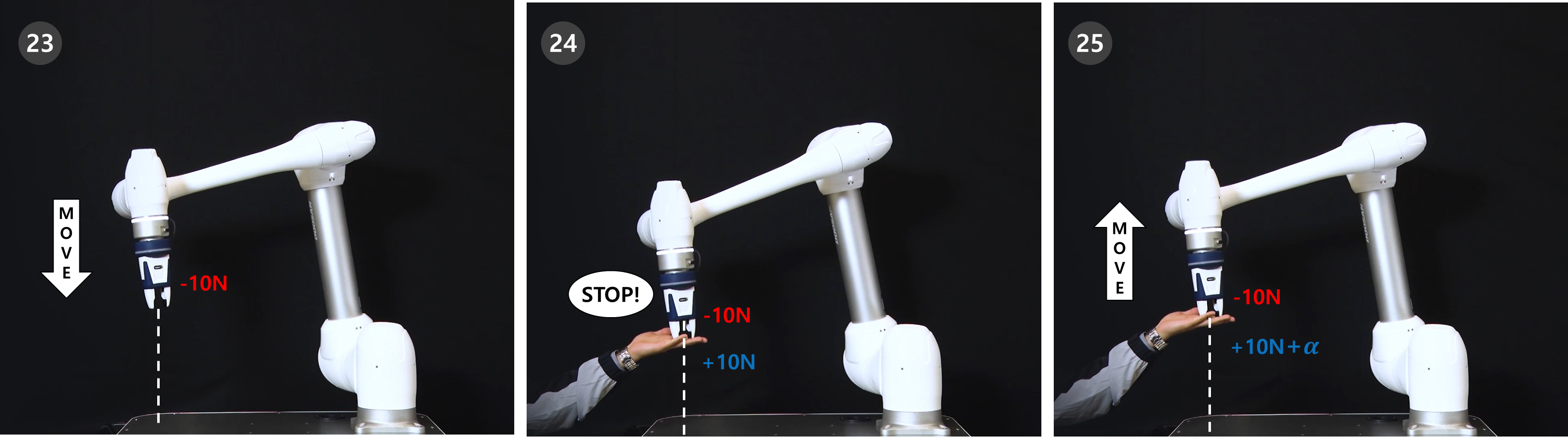
- -10N síly se aplikuje na konec robota TCP, což způsobí, že robot se pomalu pohybuje ve směru osy Z.
- Konec robota odpuzuje pohyb robota ve směru osy +z proti směru pohybu robota. Když síla pohybující se robotem a síla odpuzující pohyb robota dosáhne rovnováhy, robot si zachová svou polohu, jako by se zastavil.
- Pokud na robota působí síla větší než +10N, robot bude dodržovat sílu působící na robota a bude se pohybovat ve směru síly.