Vyzkoušejte vzorky příkazů Compliance
VOLITELNÉ NORMÁLNÍ 20 MIN

Tento vzorek je vytvořen v aplikaci Task Writer. Tento vzorek lze vyzkoušet téměř stejným způsobem v nástroji Task Builder.
Pozor
- Před zkoušením vzorku si přečtěte a dodržujte Upozornění při použití. Další informace naleznete ČÁST 1. Bezpečnostní příručkav části .
Poznámka
- Pokud je při aktivaci nebo deaktivaci řízení shody vnější točivý moment 15Nm nebo vyšší, robot zastaví program z důvodu chyby JTS (Joint Torque Sensor).
- Změnu tuhosti lze provést bez ohledu na vnější velikost krouticího momentu.
- Během kontroly shody nelze provádět společné pohyby, jako je příkaz MoveJ.
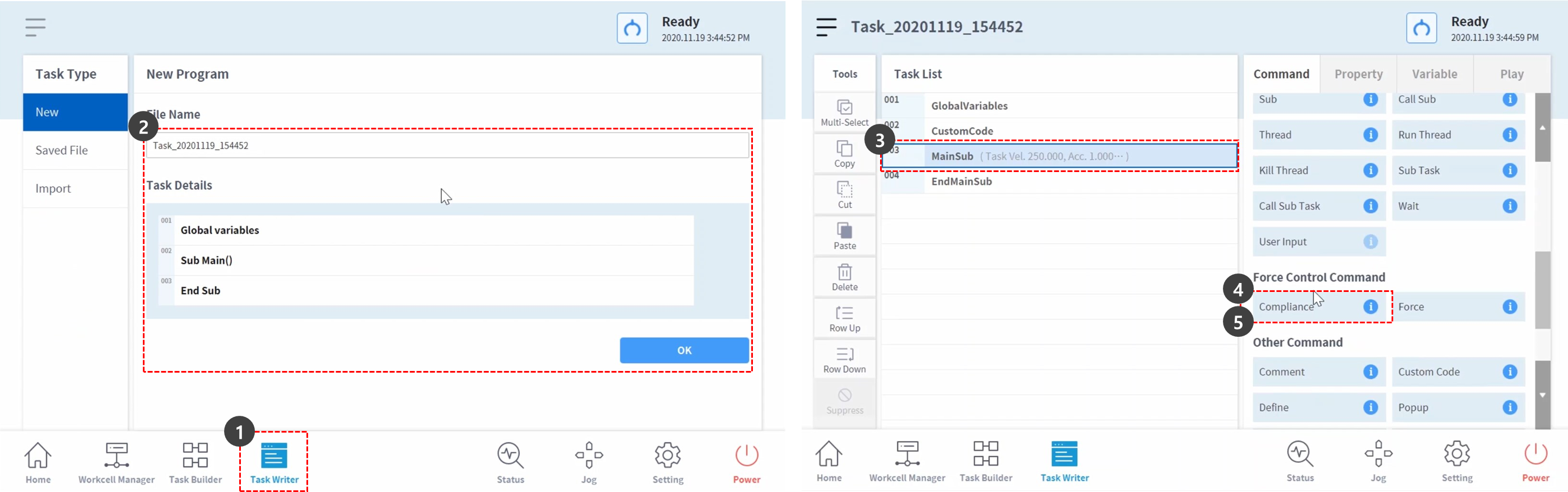
- V dolní nabídce vyberte položku Spisatel úloh.
- Zadejte název úlohy a stiskněte tlačítko OK.
- Ze třetího řádku seznamu úloh vyberte příkaz MainSub . Na další řádek vybraného řádku se přidá nový příkaz.
- Přidat příkaz konformity. Tento příkaz se plánuje použít pro aktivaci kontroly konformity.
- Přidejte další kontrolu konformity. Tento příkaz se plánuje použít pro deaktivaci kontroly konformity.
- Na čtvrtém řádku vyberte příkaz shody. Na další řádek vybraného řádku se přidá nový příkaz.
- Přidat příkaz čekání.
- Vyberte kartu vlastnost.
- Nastavte dobu čekání následujícím způsobem:
- Doba čekání: 100 s.
- Stiskněte tlačítko Potvrdit.
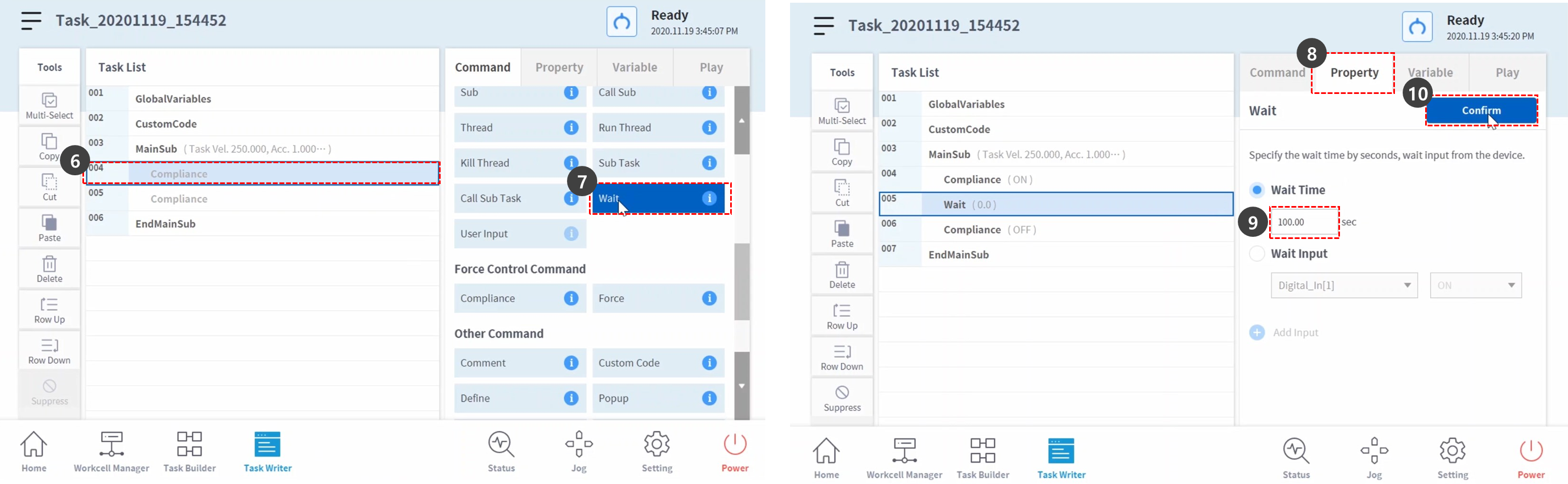
- Na šestém řádku vyberte příkaz shody.
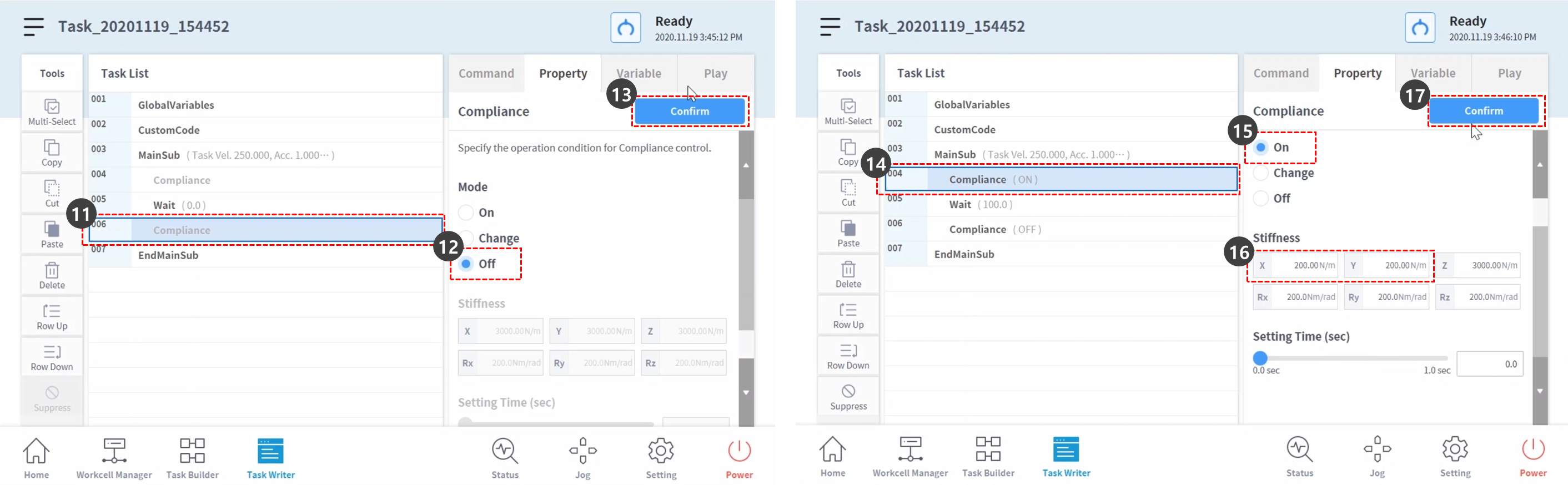
- Nastavte režim ve vlastnosti následujícím způsobem: Režim vypnutý deaktivuje kontrolu konformity.
- Režim: Vypnuto
- Stiskněte tlačítko Potvrdit.
- Na čtvrtém řádku vyberte příkaz shody.
- V poli vlastnost nastavte režim následujícím způsobem: Režim ZAPNUTO umožňuje kontrolu konformity.
- Režim: ZAP
- Nastavte tuhost následujícím způsobem: Snižte tuhost ve směru X a Y pro měkčí reakce ve směru X a Y.
- X: 200 N/m
- Y: 200 N/m
- Z: 3000 N/m (výchozí)
- Rx, Ry, Rz: 200 Nm/rad (výchozí)
- Stiskněte tlačítko Potvrdit.
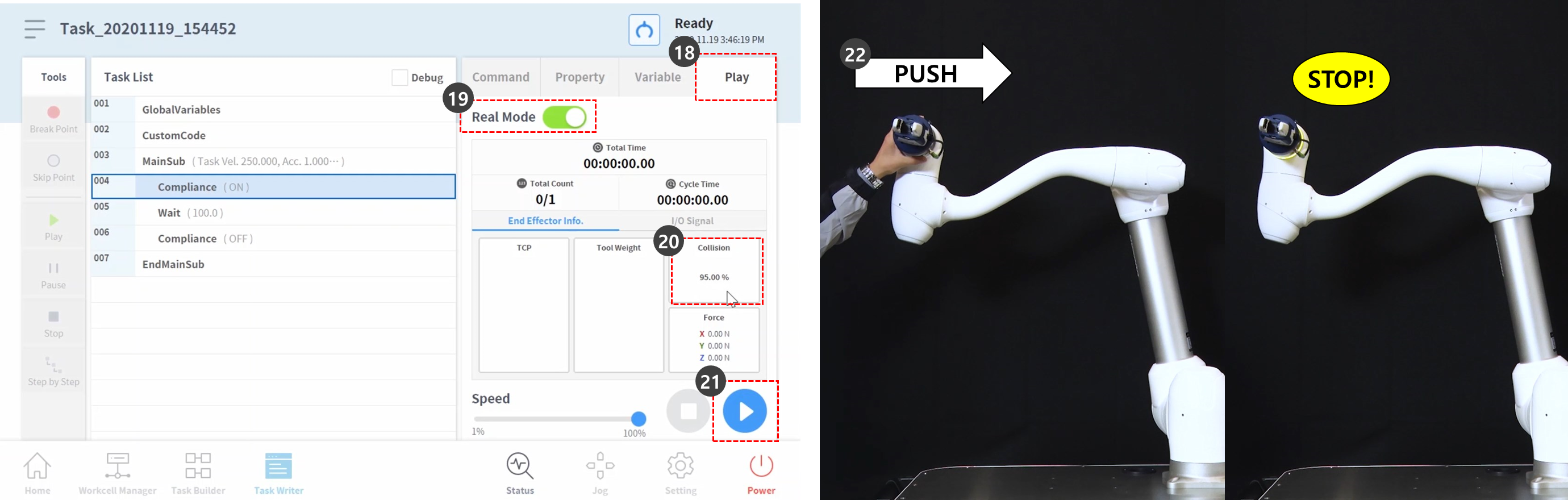
- Vyberte kartu Přehrát.
- Aktivujte přepínací tlačítko reálného režimu.
- Jakmile se přepínací tlačítko aktivuje, tlačítko se rozsvítí zeleně.
- Tento vzorek záměrně aktivuje bezpečnostní vypínač, aby vysvětlil důvod snížení citlivosti na kolizi během kontroly konformity. Citlivost vůči kolizi tohoto vzorku je 95 %. V případech s tak vysokou citlivostí na kolizi reaguje robot velmi citlivě na kolize.
- Po kolizi se robot zastaví bezpečnostním dorazem.
- Stiskněte tlačítko Přehrát.
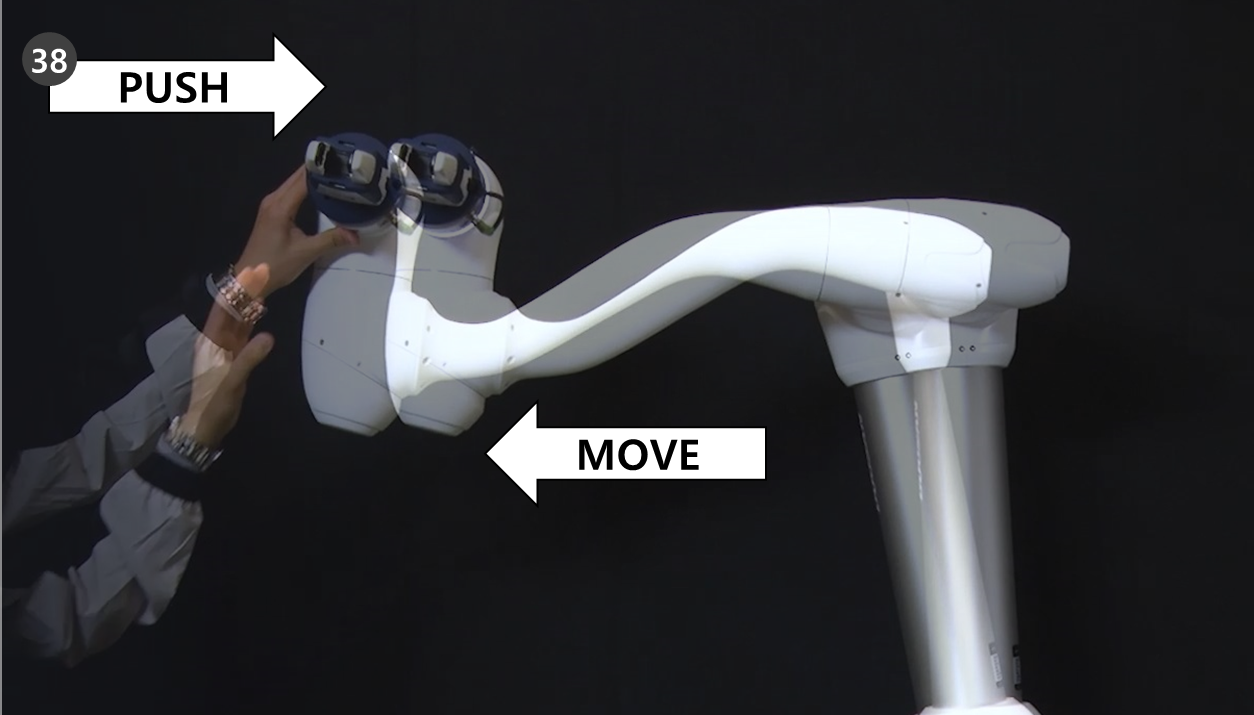
- Podržte konec robota a pomalu jej zatlačte ve směru těla robota. Robot se zastaví kvůli chybě kolize. Během bezpečnostního zastavení v důsledku kolize se kontrolka LED robota rozsvítí žlutě.
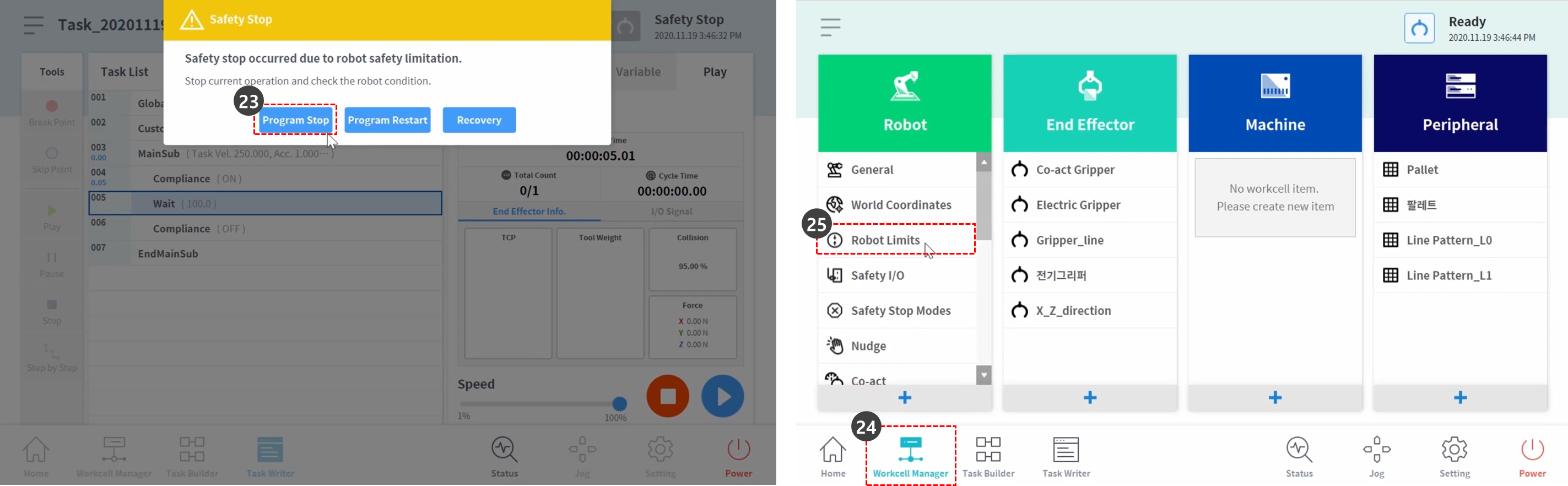
- Stiskněte tlačítko zastavení programu ve žlutém výstražným okně bezpečnostního zastavení na obrazovce. Probíhající program úloh je zastaven.
- V dolní nabídce vyberte Správce pracovních buněk.
- Zvolte Robot > limity robota.
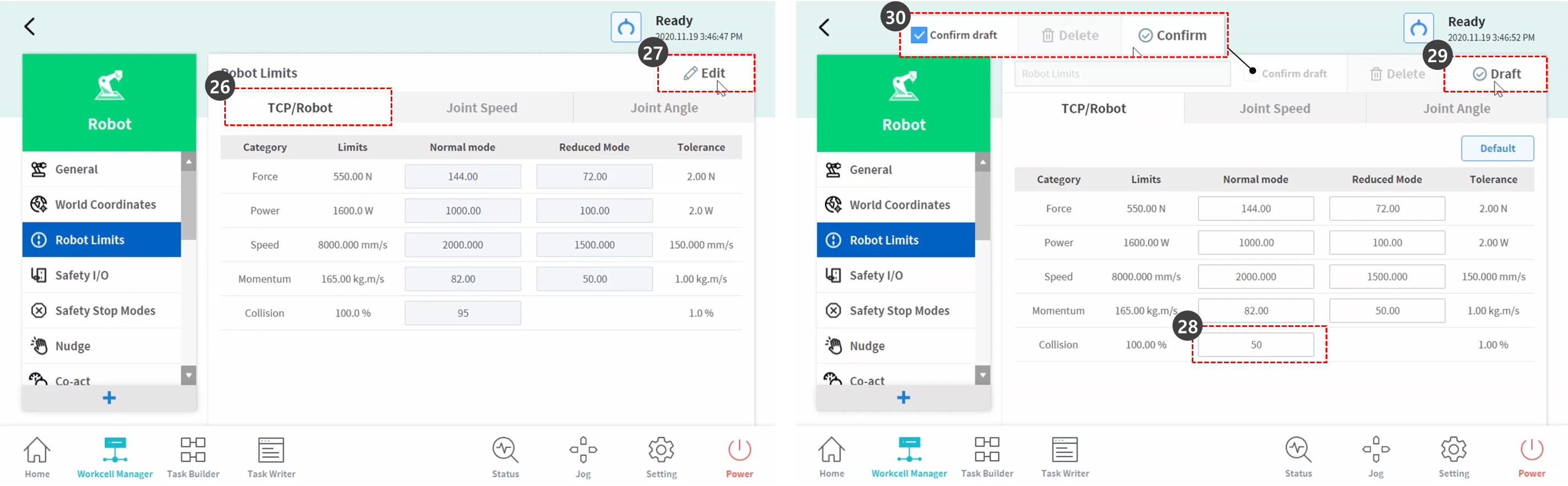
- Vyberte kartu TCP/Robot.
- Stiskněte tlačítko Upravit.
- Citlivost na kolizi nastavte následujícím způsobem:
- Normální režim: 50 %
- Stiskněte tlačítko Koncept.
- Zaškrtněte políčko Potvrdit koncept a stiskněte tlačítko Potvrdit.
- V dolní nabídce vyberte položku Spisatel úloh.
- Vyberte uložený soubor na obrazovce vlevo.
- Před výběrem položky zkontrolujte, zda je název prvního souboru úlohy názvem úlohy v kroku 2. Poslední uložená úloha se nachází v horní části seznamu souborů aplikace Task Writer.
- Stiskněte tlačítko Otevřít.
- Vyberte kartu Přehrát.
- Aktivujte přepínací tlačítko reálného režimu.
- Stiskněte tlačítko Přehrát.
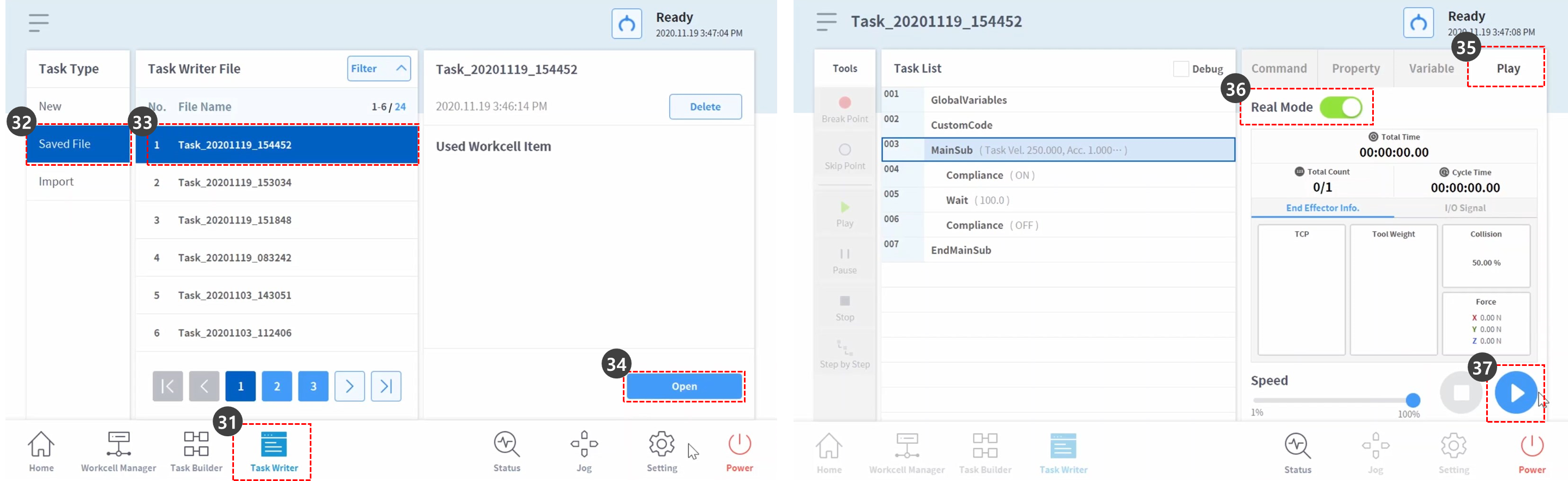
- Podržte konec robota a pomalu jej zatlačte ve směru těla robota. Robot se pohybuje v důsledku tlačné síly a vrací se do původní polohy.