
Pohyb s referenčními souřadnicemi světových souřadnic
Chcete-li robota posunout podle Světových souřadnic, postupujte podle následujících kroků:
- Vyberte kartu Pohyb a vyberte kartu Úloha.
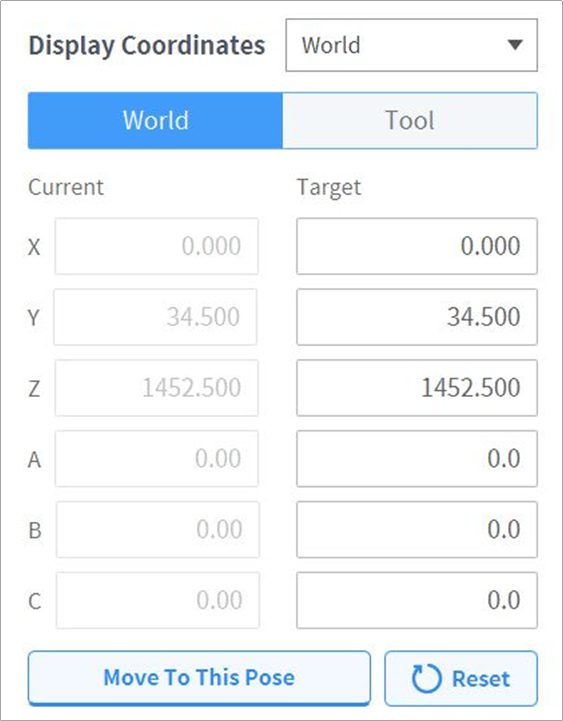
- Jako zobrazovací souřadnice vyberte Světové a vyberte kartu Světové.
- V závislosti na Světových souřadnicích nastavte pozici, do které se má robot posunout.
- Klepněte na tlačítko „Posunout do odpovídající pozice“ a podržte ho, čímž přejdete do nastavené souřadnice.