Zkuste vynutit vzorky příkazů
VOLITELNÉ NORMÁLNÍ 20 MIN

Tento vzorek je vytvořen v aplikaci Task Writer. Tento vzorek lze vyzkoušet téměř stejným způsobem v nástroji Task Builder.
Pozor
Před zkoušením vzorku si přečtěte a dodržujte (2.11.0.1_temp-cs_CZ) Upozornění při použití. Další informace naleznete (2.11.0.1_temp-cs_CZ) ČÁST 1. Bezpečnostní příručkav části .
Tento vzorek vyžaduje soubor aplikace Task Writer vytvořený v (2.11.0.1_temp-cs_CZ) Vyzkoušejte vzorky příkazů Complianceaplikaci .
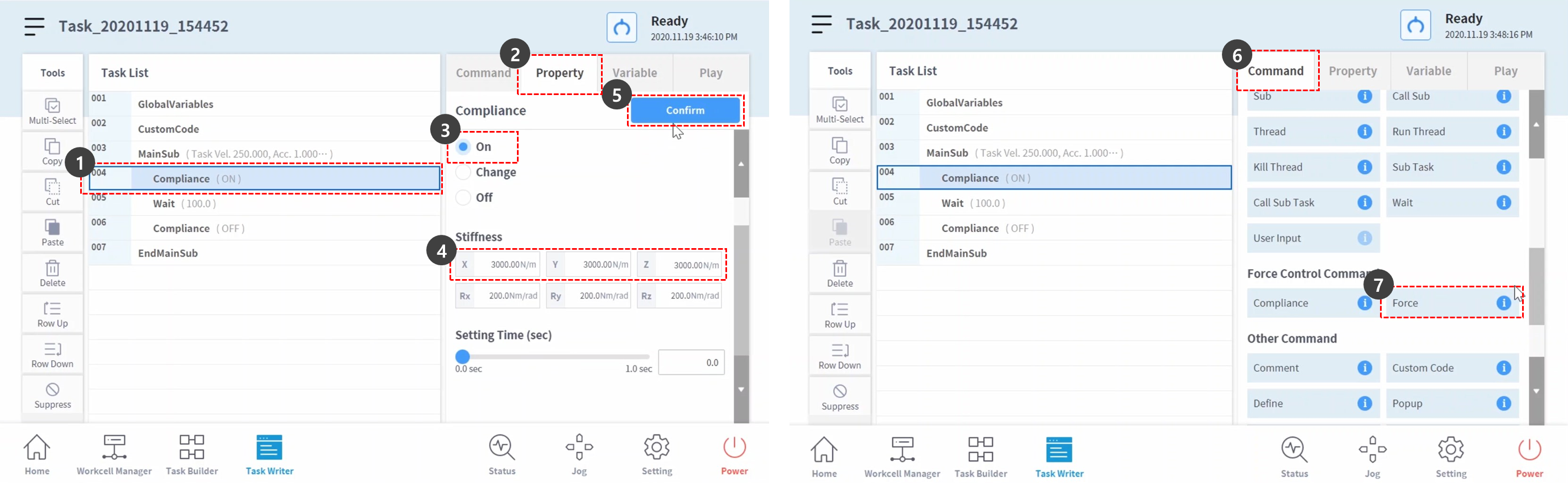
(2.11.0.1_temp-cs_CZ) Vyzkoušejte vzorky příkazů Compliance Otevřete vytvořený soubor aplikace Task Writer a na čtvrtém řádku seznamu úloh vyberte příkaz compliance.
Vyberte kartu vlastnost.
Nastavte režim následujícím způsobem: Režim ZAPNUTO umožňuje kontrolu konformity. Příkaz Vynutit je k dispozici pouze v případě, že je povoleno řízení souladu.
Režim: ZAP
Nastavte výchozí hodnotu tuhosti následujícím způsobem:
X, Y, Z: 3000 N/m (výchozí)
Rx, Ry, Rz: 200 Nm/rad (výchozí)
Stiskněte tlačítko Potvrdit.
Vyberte kartu příkaz.
Přidejte příkaz síla. Tento příkaz je plánován pro aktivaci řízení síly.
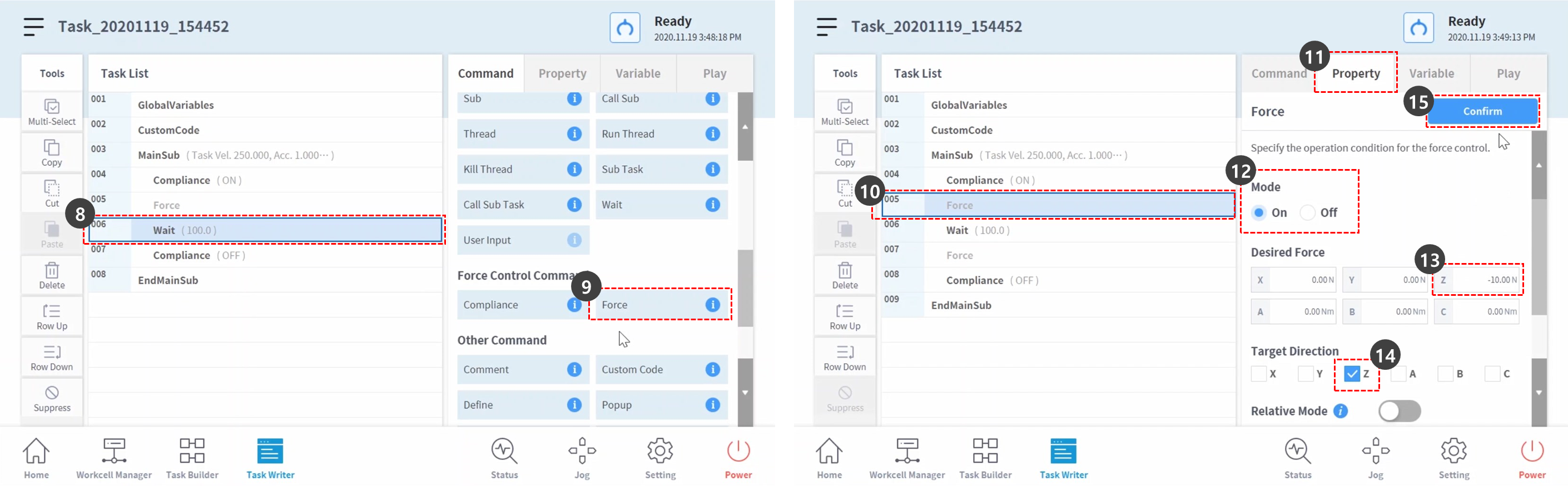
Vyberte šestý řádek seznamu úkolů.
Přidejte příkaz síla. Tento příkaz se plánuje použít pro deaktivaci řízení síly.
Vyberte příkaz síla z pátého řádku seznamu úkolů.
Vyberte kartu vlastnost.
Nastavte režim následujícím způsobem: Režim ZAPNUTO umožňuje řízení síly.
Režim: ZAP
Nastavte požadovanou sílu následujícím způsobem:
X: 0 N (výchozí)
Y: 0 N (výchozí)
Z: -10 S.
Rx, Ry, Rz: 200 Nm/rad (výchozí)
Zkontrolujte pouze osu z ve směru cíle.
Stiskněte tlačítko Potvrdit.
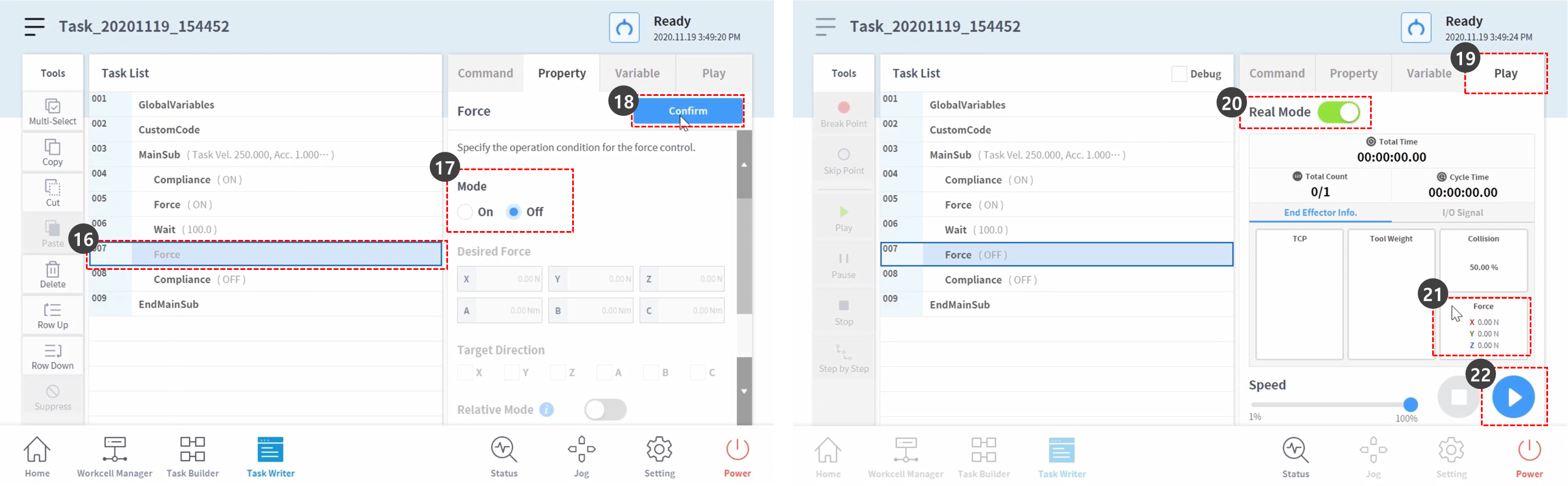
Vyberte příkaz Vynutit ze sedmého řádku seznamu úkolů.
Nastavte režim následujícím způsobem: Režim vypnutý deaktivuje řízení síly.
Režim: Vypnuto
Stiskněte tlačítko Potvrdit.
Vyberte kartu Přehrát.
Aktivujte přepínací tlačítko reálného režimu.
Jakmile se přepínací tlačítko aktivuje, tlačítko se rozsvítí zeleně.
Zkontrolujte, zda je síla TCP každé osy 0. Tato hodnota síly je velikost vnější síly aktuálně použité na konci TCP robota.
Stiskněte tlačítko Přehrát.
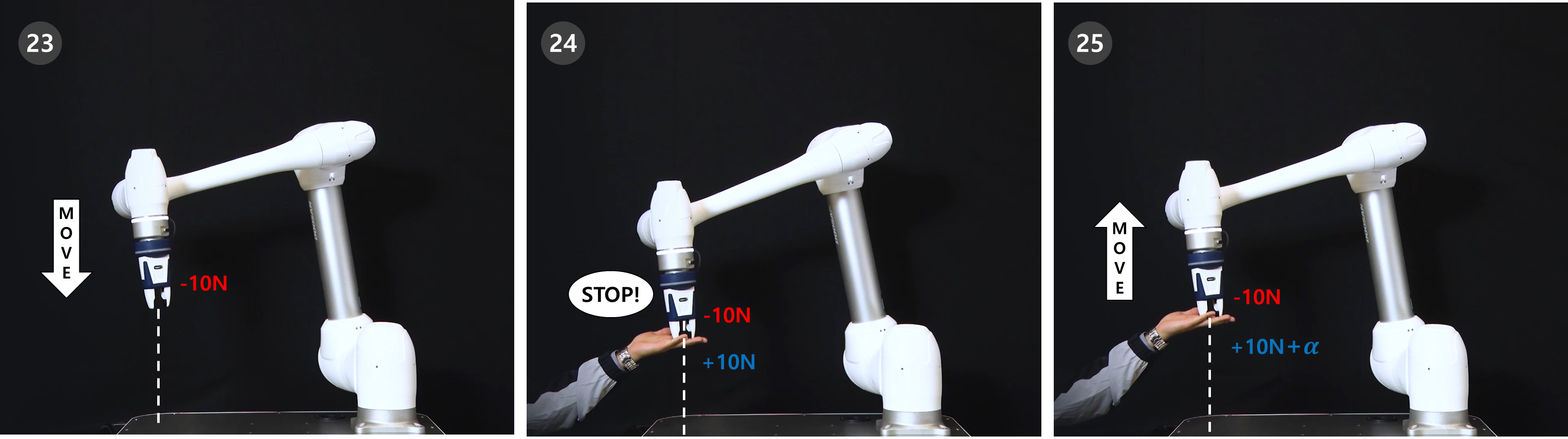
-10N síly se aplikuje na konec robota TCP, což způsobí, že robot se pomalu pohybuje ve směru osy Z.
Konec robota odpuzuje pohyb robota ve směru osy +z proti směru pohybu robota. Když síla pohybující se robotem a síla odpuzující pohyb robota dosáhne rovnováhy, robot si zachová svou polohu, jako by se zastavil.
Pokud na robota působí síla větší než +10N, robot bude dodržovat sílu působící na robota a bude se pohybovat ve směru síly.