
系统配置
| 否 | 名称 | 说明 |
|---|---|---|
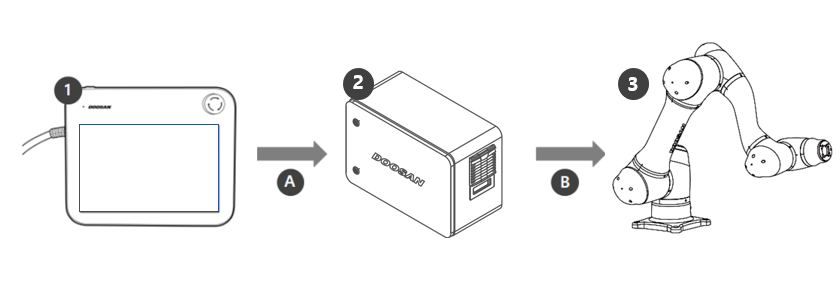
| 1. | 示教手控盒 | 该设备管理整个系统,能够教授机器人特定的姿势或与操纵器和控制器相关的设置。 |
| 2. | 控制器 | 用于根据示教手控盒设置的姿势或移动调整机械手的移动。它具有各种I/O端口,允许连接和使用各种类型的设备和设备。 |
| 3. | 机械手 | 这是一种工业协作机器人,可与各种工具附件一起用于运输物体或装配零件。 |
| 答 | 命令/监测 | |
| B. | 电源/网络 |
| 否 | 名称 | 说明 |
|---|---|---|
| 1. | 示教手控盒 | 该设备管理整个系统,能够教授机器人特定的姿势或与操纵器和控制器相关的设置。 |
| 2. | 控制器 | 用于根据示教手控盒设置的姿势或移动调整机械手的移动。它具有各种I/O端口,允许连接和使用各种类型的设备和设备。 |
| 3. | 机械手 | 这是一种工业协作机器人,可与各种工具附件一起用于运输物体或装配零件。 |
| 答 | 命令/监测 | |
| B. | 电源/网络 |