
摩擦校准
此菜单仅适用于 E 和 A 系列机器人。
| 物品 | 描述 | |
|---|---|---|
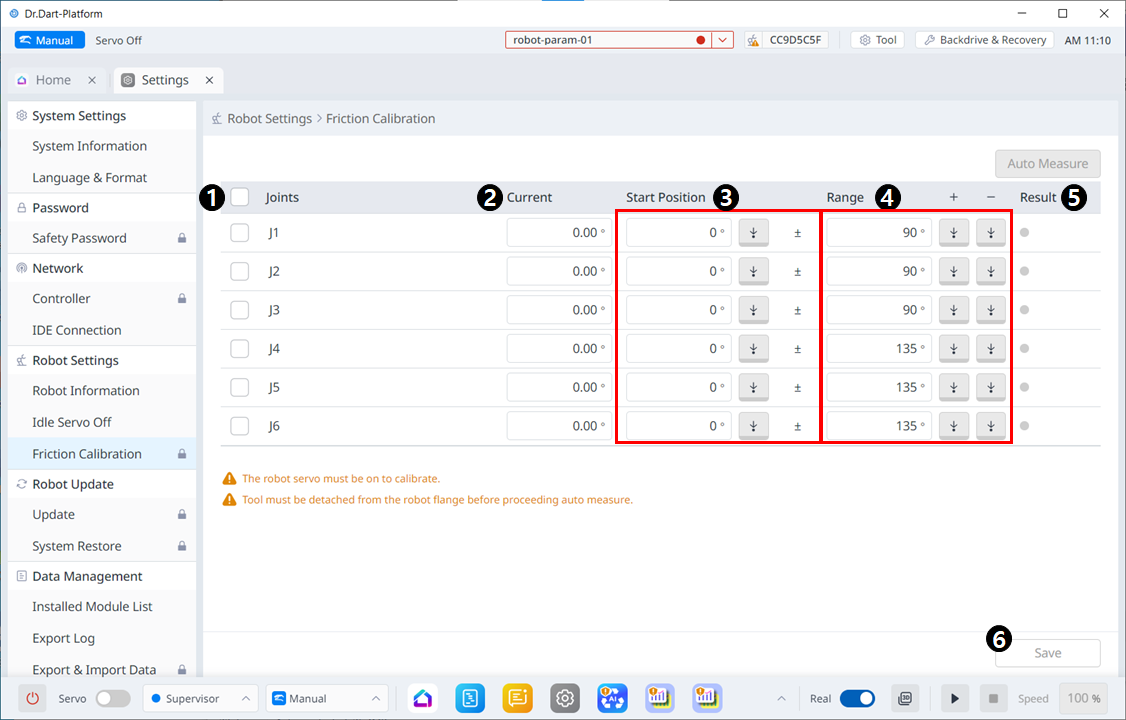
| 1 | Joint Check Box | 选择要自动测量的关节。 |
| 2 | Current | 显示当前机器人姿态。 |
| 3 | Start Position | 输入执行自动测量时关节开始的姿势。 未选择的轴也需要输入。 |
| 4 | Range | 输入轴移动的范围。 只有选中的轴才允许输入。 |
| 5 | Result | 显示自动测量的结果。 |
| 6 | Save | 测量结果应用于下属。 |
此菜单仅适用于 E 和 A 系列机器人。
| 物品 | 描述 | |
|---|---|---|
| 1 | Joint Check Box | 选择要自动测量的关节。 |
| 2 | Current | 显示当前机器人姿态。 |
| 3 | Start Position | 输入执行自动测量时关节开始的姿势。 未选择的轴也需要输入。 |
| 4 | Range | 输入轴移动的范围。 只有选中的轴才允许输入。 |
| 5 | Result | 显示自动测量的结果。 |
| 6 | Save | 测量结果应用于下属。 |