
移动屏幕
移动菜单布局
| Item | Description | |
|---|---|---|
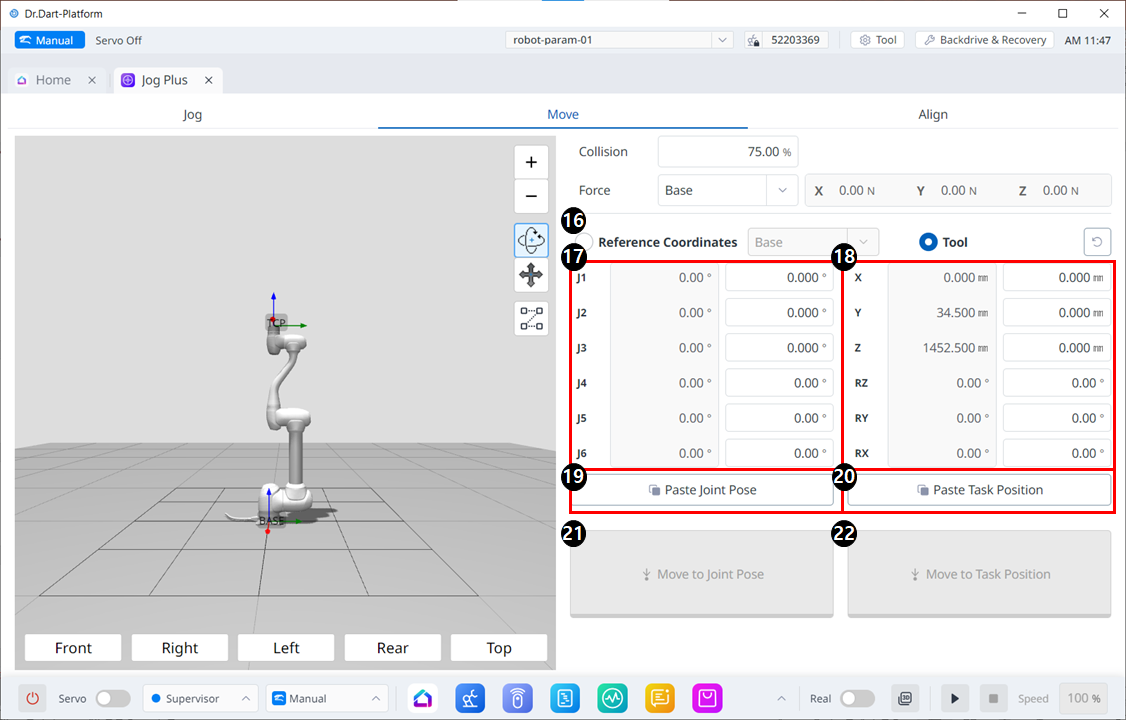
| 16 | Reference Coordinates | 选择用于图 18 中的任务坐标的参考坐标系。您可以选择基础坐标、世界坐标或用户坐标。 |
| 17 | Joint Posture | 显示当前机器人姿态和目标关节姿态。 |
| 18 | Task Posture | 显示适合所选参考坐标系的当前机器人姿态和目标任务姿态。 |
| 19 | Paste Joint Posture | 将复制到剪贴板的姿势值粘贴到关节姿势面板中。 |
| 20 | Paste Task Posture | 将复制到剪贴板的姿势值粘贴到任务姿势面板中。 |
| 21 | Joint Move button | 该按钮使机器人移动到目标关节姿势。 |
| 22 | Task Move button | 该按钮使机器人移动到目标任务姿势。 |