任务编辑器命令的合规性/强制控制概念概述
可选 困难 20分钟
力控制和合规控制是控制机械手力的功能。此外,通过添加运动命令,可以在进行运动的同时控制力。合规性控制和强制控制分别具有以下差异。
- 合规性控制
- 在合规性控制的情况下,机械手遵守机械手末端TCP处的外部力,当外部力被移除时,将产生一种力,将机械手移回应达到的位置。
- 当机械手在崎岖不平的路面上直线移动,并且您希望确保机械手移动而不会对自身或表面造成损坏时,可以使用此方法。这也可用于防止工件附近发生意外碰撞。
- 强制控制
- 在力控制的情况下,力被应用到机械手末端的TCP。在力产生的方向上产生加速度,使机械手除运动方向外,还同时沿力的方向移动。
- 当机器人与物体接触时,作用力被施加到物体上,直到设定的力和物体的排斥力处于平衡状态。
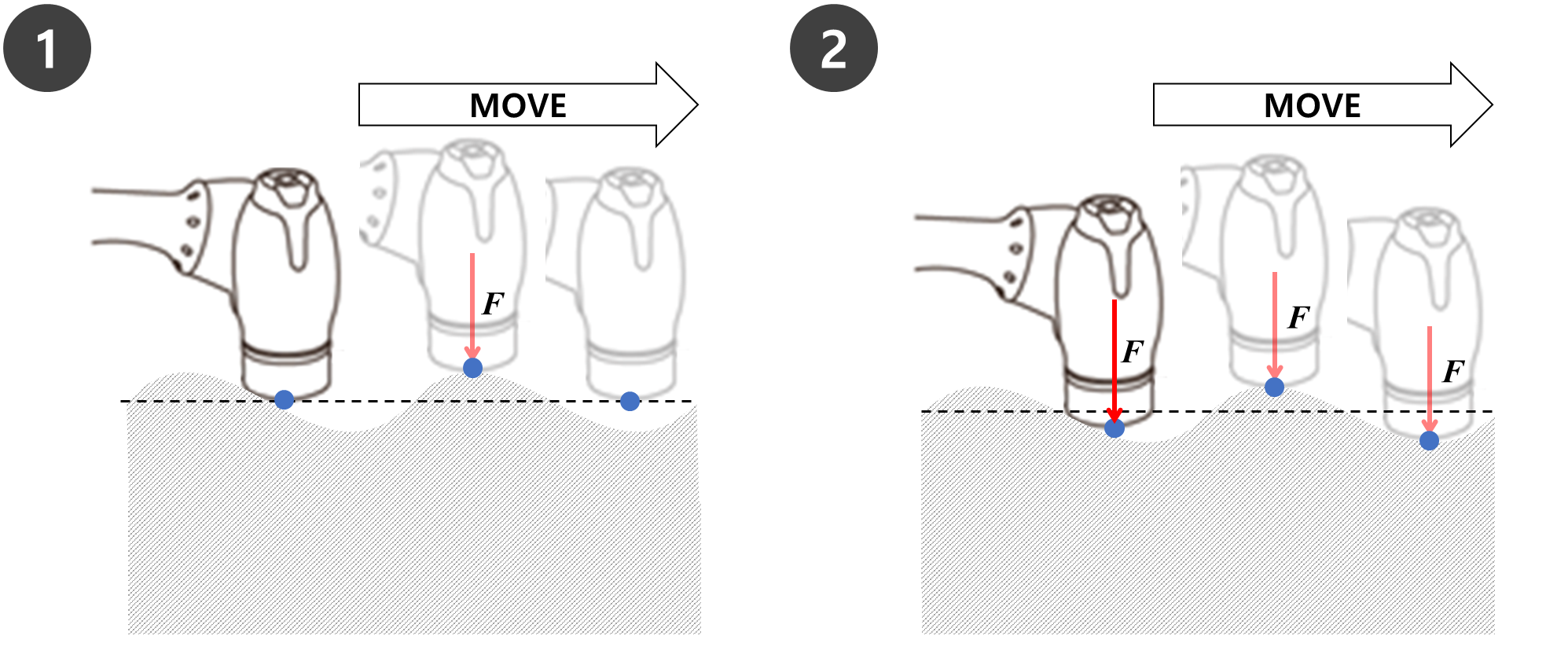
- 当机器人在崎岖不平的路面上直线移动,并且您想要确保在路面上施加恒定的力时,可以使用这种方法。这也可用于需要机器人以恒定力推动的任务,即抛光工作。
注意
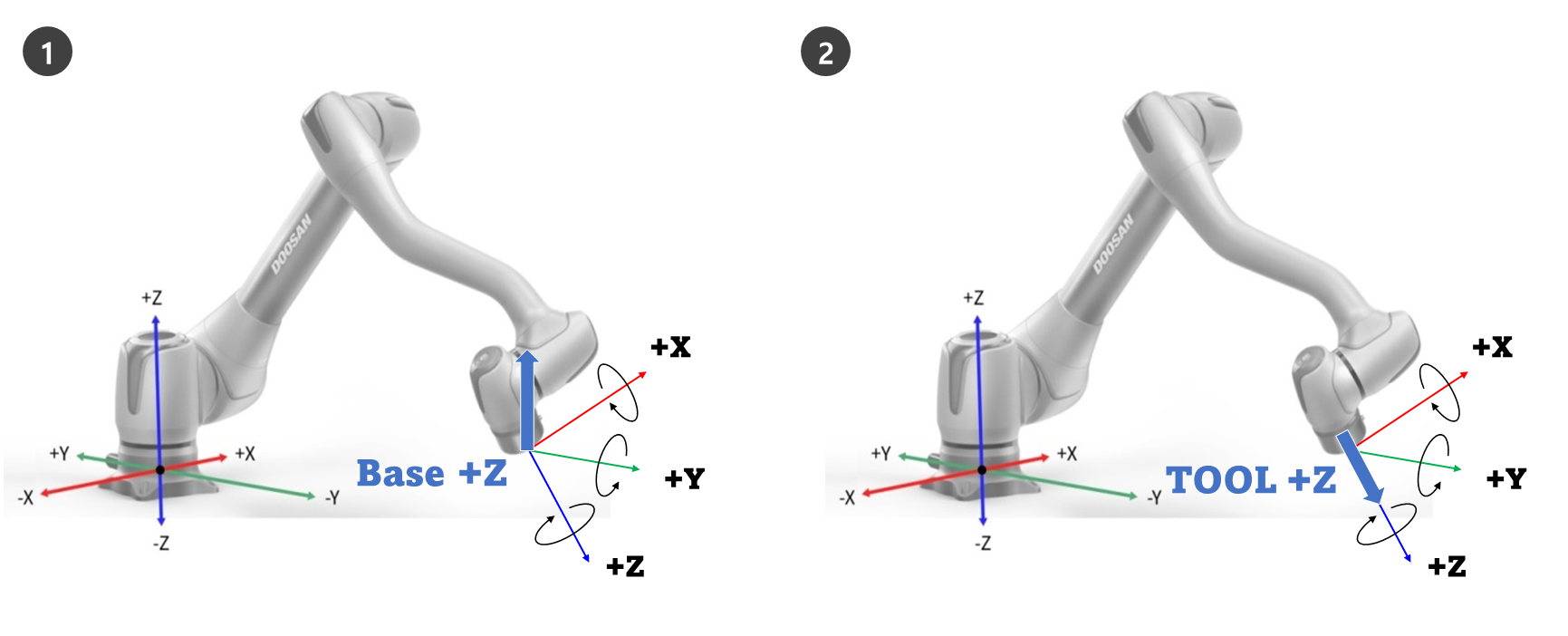
遵循性和强制命令根据当前坐标执行。任务的默认坐标是基准坐标,坐标可以使用set命令更改。
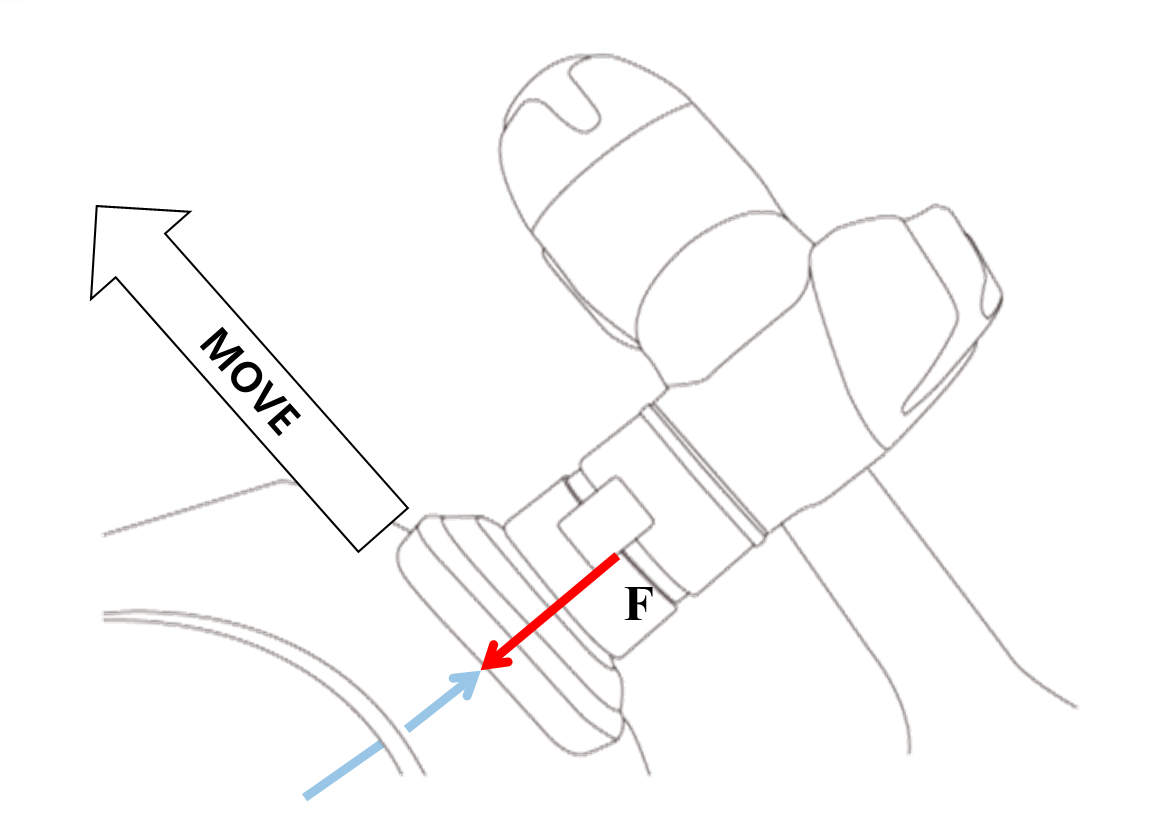
- 图 1是在基准坐标上应用+Z方向的力/合规控制时的操作方向。
- 图 2是在刀具坐标上施加+Z方向力/合规控制时的操作方向。
合规性控制
合规控制是在机械手末端对TCOP施加力时,根据设定刚度遵守外部力的功能。它平衡目标点处的力,并且是一种控制方法,如果偏离平衡点发生位移,则会产生排斥力。在合规控制期间,机器人末端像弹簧一样反弹。
- 如果在单独使用运动控制时发生碰撞,碰撞的物体可能会损坏。
- 发生碰撞时,斗山机器人会安全地停止,但 根据用户设置(如安全限制>碰撞灵敏度),可能会发生以下情况。
- 如果在运动控制过程中合规控制设置为"开",机械手将在与碰撞的物体合规的同时移动。
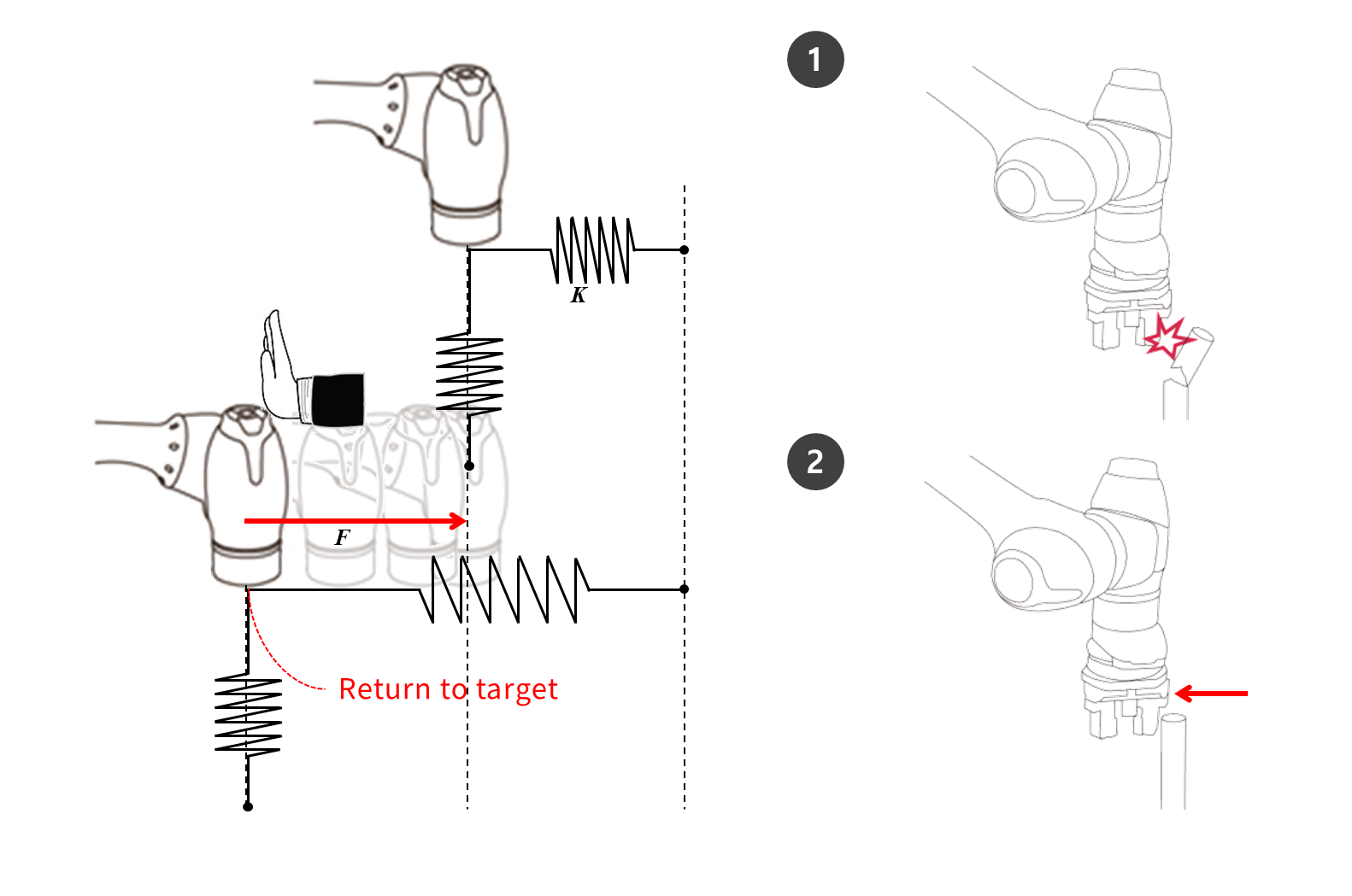
如果F为外部力,K为刚度,X为距离,则以下公式为真。
- F = K * X
- K = F / X
- X = F / K
根据上述公式,如果合规控制的刚度设置为1000N/m,并且如果机械手移动1 mm,则产生的外力为1N。
- F=1000 N/m*0.001 m=1 N (0.001 m=1毫米)
注意
在Compliance Command的属性上,可以设置以下值:
- 模式
- 开:启用合规性控制
- 更改:如果合规模式设置为打开,则会更改为刚度
- 关闭:禁用合规性控制
- 刚度范围
- M/H系列:平移(0~20000N/m),旋转(0~1000nm/rad)
- A系列:平移(0~10000N/m),旋转(0~300Nm/rad)
- 较低的刚度值将对外部力作出更轻微的响应,并需要更多的时间才能返回目标点
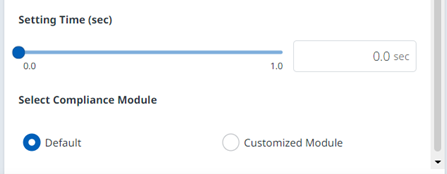
- 设置时间
- 这是当前刚度值达到设置刚度值(0-1秒)所需的时间

小心
- 必须准确设置工具重量和TCP (工具中心点)。不准确的刀具重量会导致机械手将刀具重量检测为外力,并且将合规性命令设置为"开"会产生位置错误。
- 连衣裙的张力可能会对机械手产生外部扭矩。因此,安装连衣裙时要小心。
- 在执行异步运动或混合运动时,不能打开或关闭合规性。
- 合规命令打开期间,只允许线性运动。不允许运动,如MoveJ和MoveSJ。
- 在合规性命令打开期间,无法更改工具权重或TCP。
- 在合规命令打开期间,由于运动执行过程中产生的扭矩合规,可能无法准确到达目标点。因此,建议在目标点附近打开合规性控制。或者,可以通过设置一个较大的刚度值来最小化位置误差。
力控制
力控制是在力控制方向上施加力直到设定力和排斥力平衡的功能
- 它沿设定的力方向移动机器人,如果与物体接触,它将保持输入的力(N)
- 它能够在施加恒定力的同时,在与力方向不同的方向上进行运动控制
- 最小设置为+/- 10N,可通过0.2N的分辨率进行微调
- 力控制在奇异性区域中不可用
- 通常,合规性控制与力控制结合使用,以使力控制符合外部力
注意
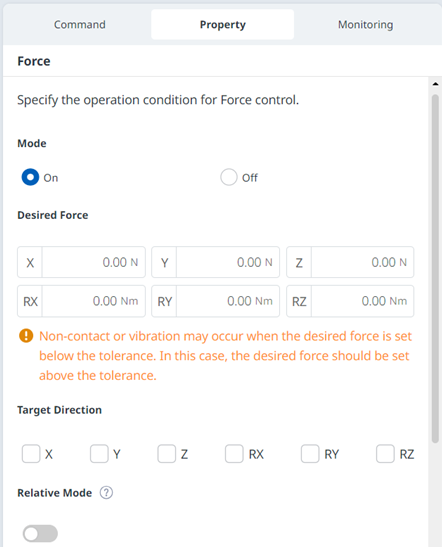
从Force Command的属性中,可以设置以下值。
- 模式
- 开:启用力控制
- 关闭:禁用强制控制
- 所需的力范围
- X,Y,Z:10 -(每个机械手的最大值) N
- A,B,C:5 -(每个机械手的最大值) Nm
- 有关最大作用力的更多信息 安全参数的阈值范围上/下限和默认值,请参见。
- 目标方向
- 它移动到每个方向的选定目标值。
- 可以进行多个选择。
- 力控制只能在力设置后使用方向设置来执行。
- 如果多个选定方向中的一个达到目标力,它将继续移动,直到达到另一个方向的目标值。
- 相对模式
- 如果启用此模式,它会将施加在机械手上的外力校准为0,以提高力控制精度。
- 当相对模式被禁用时,应用于目标的实际力等于设定力和外部力之和。
- 当启用相对模式时,应用于目标的实际力等于设定的力。
- 在力控制过程中,可能会发生偏差,具体取决于姿势或外力。
- 在力控制过程中,可能无法达到精确的目标点。因此,建议在目标点附近启用力控制。
- 如果启用此模式,它会将施加在机械手上的外力校准为0,以提高力控制精度。
- 设置时间
- 这是当前力值达到设置力值(0-1)所需的时间