
任务编辑器移动命令背后的基本概念概述
必填 简单 5分钟
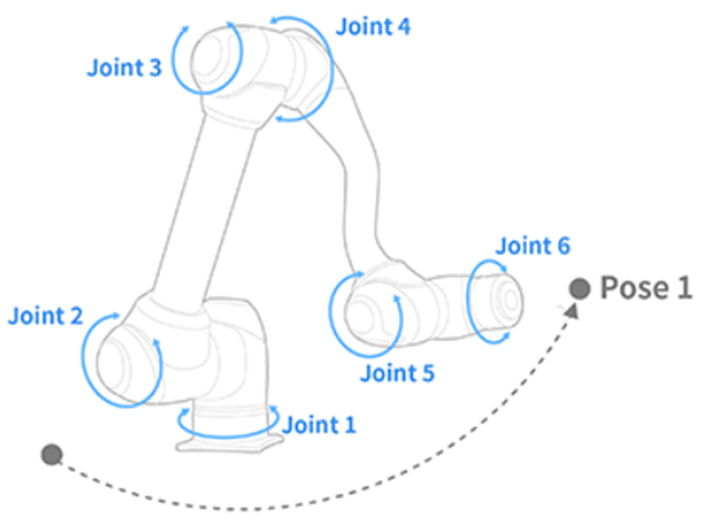
斗山机器人机器人提供九种动作。机械手的移动由标准动作,MoveJ和MoveL以及这两个动作所产生的7个动作控制。
机械手运动的类型
| 运动 | 功能 | |
|---|---|---|
| 1. | MoveJ | 机械手的每个接头都从当前角度移动到目标角度,并同时停止
|
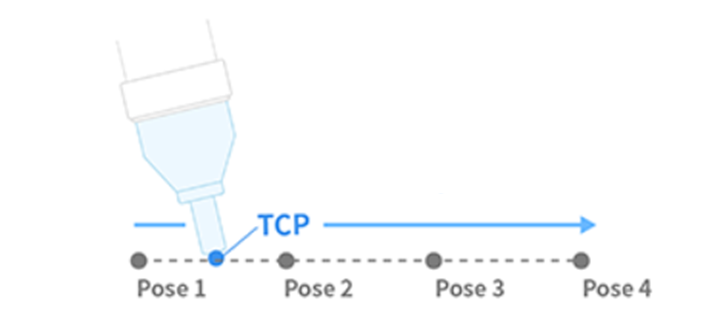
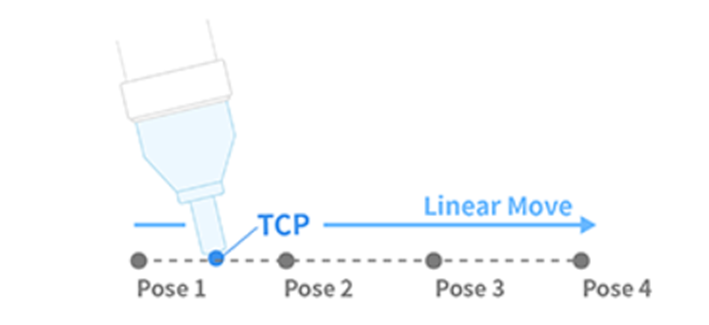
| 2. | 移动 | 机械手在保持机械手TCP平直的同时移动到目标点
|
| 3. | MoveSJ. | 机械手在机械手设定的所有角度内移动
|
| 4. | MoveSX | 机器人TCP在所有点之间移动
|
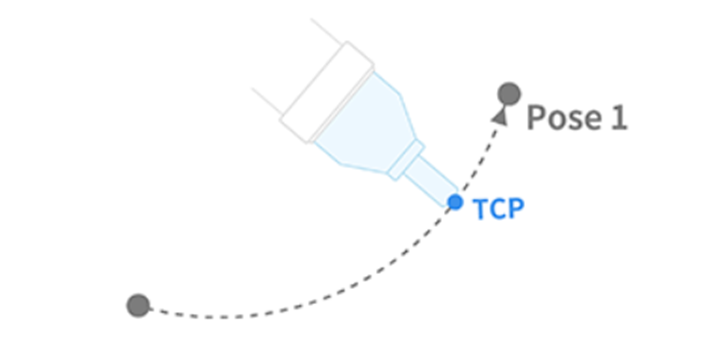
| 5. | MoveJX | 当机器人TCP移动到目标点时,将指定机器人姿势
|
| 6. | 移动C | 机械手TCP在保持圆弧的同时移动到目标点
|
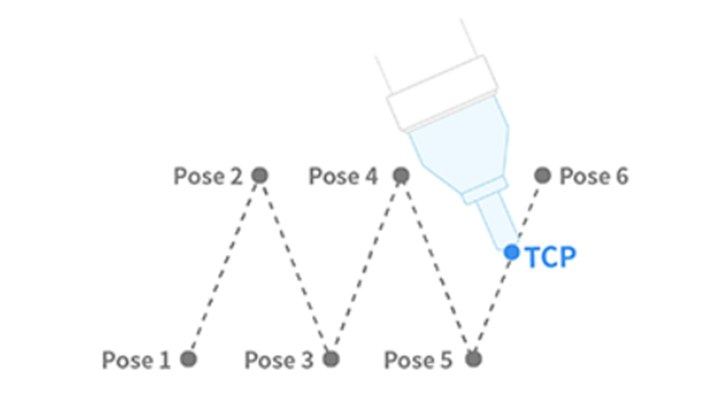
| 7. | MoveB. | 机器人通过由连续直线和弧线组成的截面移动到最终目标点
|
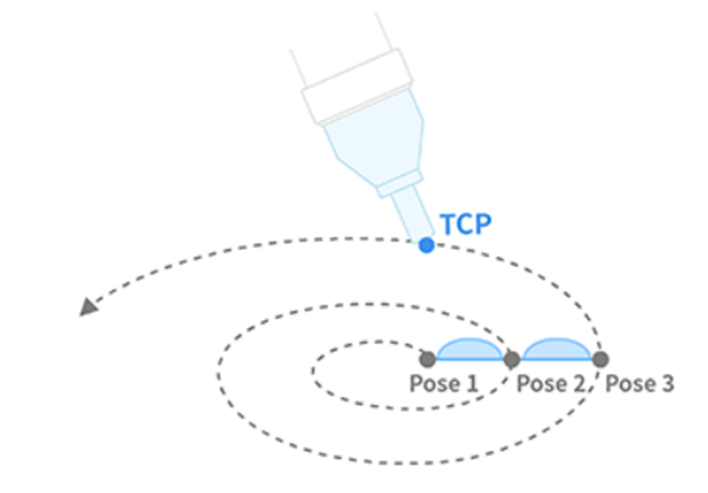
| 8. | MoveSpiral | 机械手从螺旋中心移动到最大半径
|
| 9. | 动态周期性 | 机器人在恒定振幅和循环的路径中移动
|

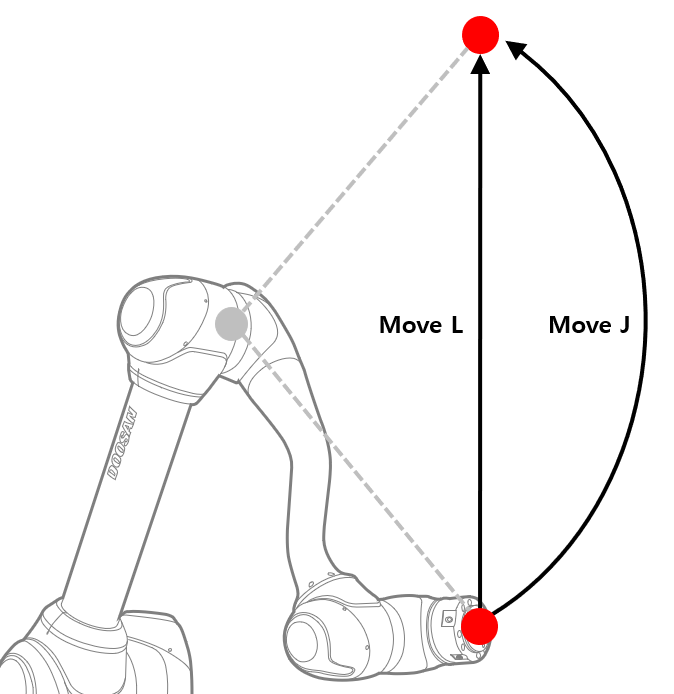
移动J&MoveL
在使用机械手运动之前,了解MoveJ和MoveL的标准运动至关重要。
- J在MoveJ中指关节。在此运动中,每个接头都移动到目标角度并同时停止。
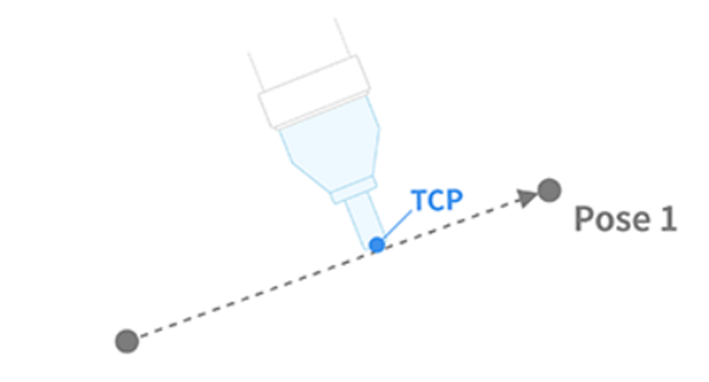
- L在MoveL中是指线性的。在此运动中,机器人末端的TCP以线性运动移动到目标姿势(位置和角度)。
| 类型 | MoveJ | 移动 | |
|---|---|---|---|
| 1. | 移动方法 |
|
|
| 2. | 优势 |
|
|
| 3. | 缺点 |
|
|
| 4. | 利用率 |
|
|