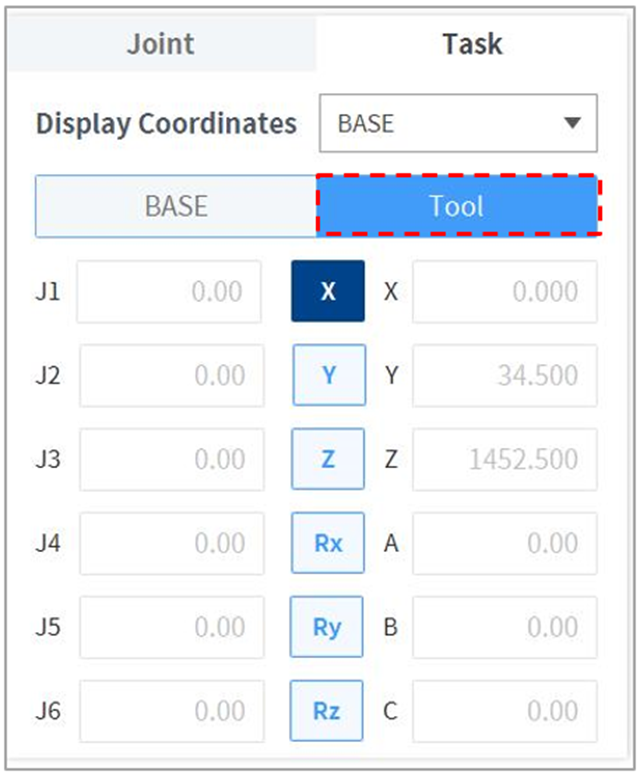
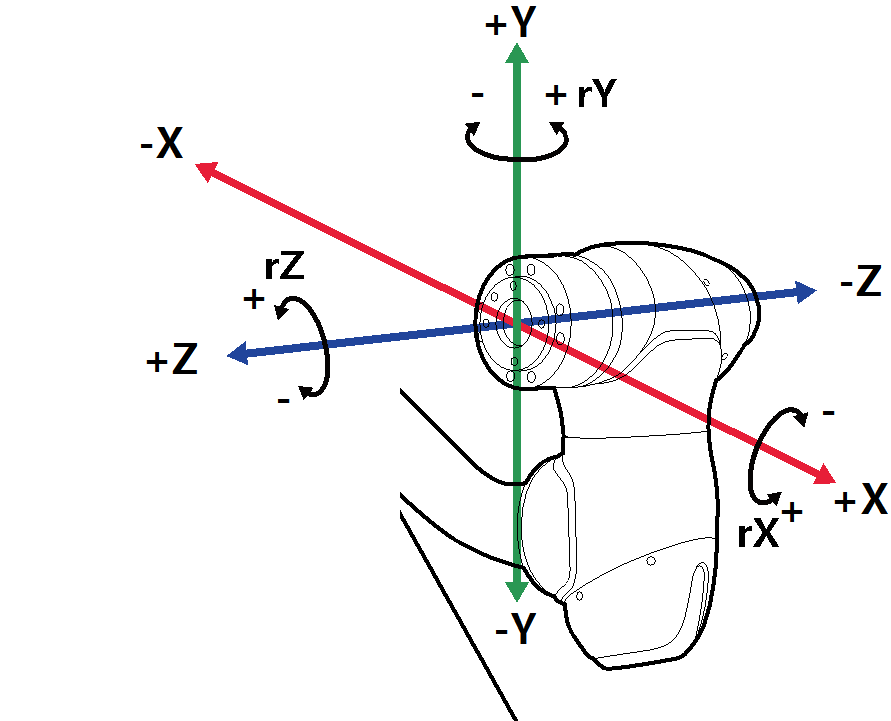
要基于机器人工具移动机器人,请执行以下步骤:
注
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.