
机器人限值设置
用于设置安全监控功能的安全限值。
注
- 限值和初始安全设置会因机器人产品系列而异。
- 安全限值是指安全级监控功能触发停止功能的情况。停止完成后,机器人的位置及施加的外力可能与配置的安全阈值不同。
Ÿ TCP/机器人限值
要设置 TCP/机器人限值,可转至 Robot(机器人)工作单元,然后选择 Robot > Robot Limits > TCP/Robot(机器人 > 机器人限值 > TCP/机器人)。TCP/Robot Limits(TCP/机器人限值)设置屏幕包括以下内容:
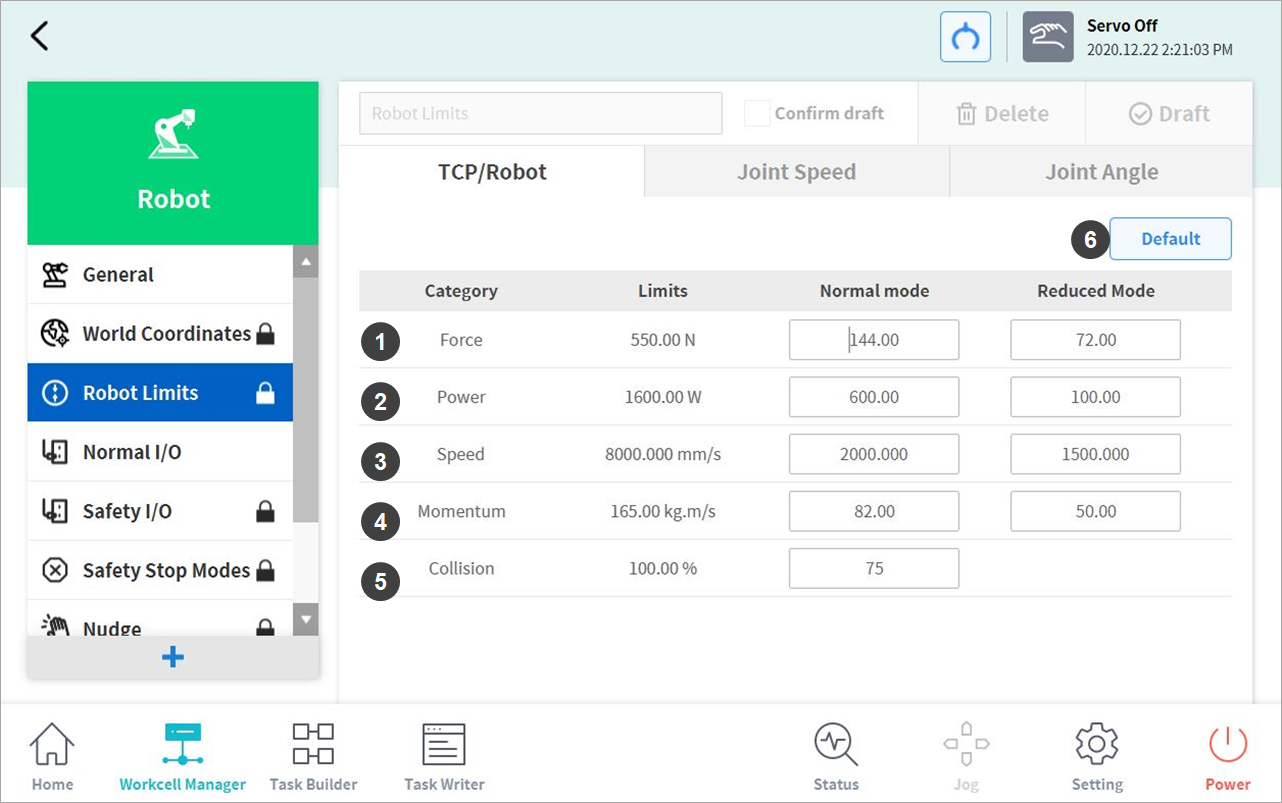
编号 | 项 | 说明 |
1 | Force (N) | 可以限制施加给工具中心点 (TCP) 的力的等级。 |
2 | Power (W) | 可以限制机器人的机械功率等级。 |
3 | Speed (mm/s) | 可以限制工具中心点 (TCP) 的速度。 |
4 | Momentum (kg.m/s) | 可以限制机器人的动量大小。 |
5 | Collision (%) | 配置碰撞检测灵敏度。 |
6 | Default Value | 将 TCP/Robot Limits(TCP/机器人限值)设置重置为默认值。 |
Ÿ 关节速度限值
要设置关节速度限值,可转至 Robot(机器人)工作单元,然后选择 Robot > Robot Limits > Joint Speed(机器人 > 机器人限值 > 关节速度)。Joint Speed Limits(关节速度限值)设置屏幕包括以下内容:
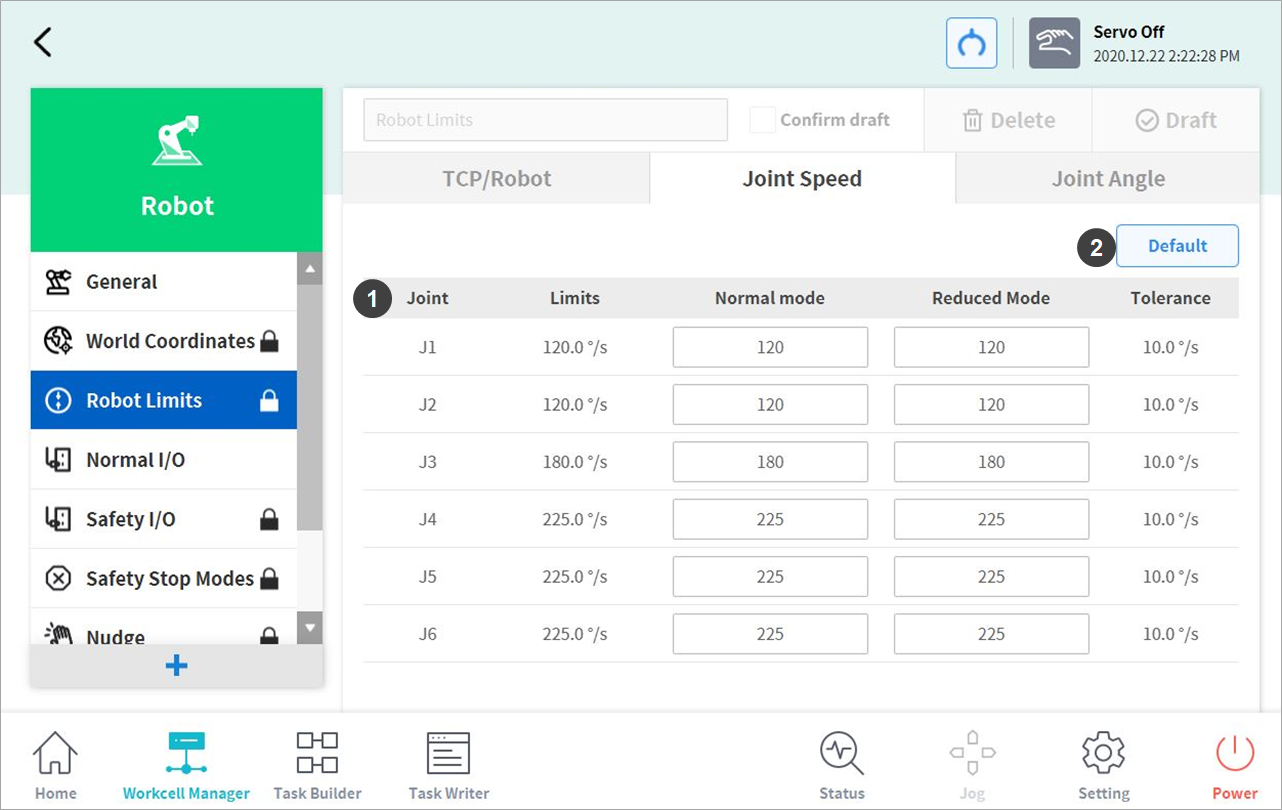
编号 | 项 | 说明 |
1 | Joint Speed | 可以限制每个关节的速度。 |
2 | Default Value | 将 Joint Speed Limits(关节速度限值)设置重置为默认值。 |
Ÿ 关节角度限值
要设置关节角度限值,可转至 Robot(机器人)工作单元,然后选择 Robot > Robot Limits > Joint Angle(机器人 > 机器人限值 > 关节角度)。Joint Angle Limits(关节角度限值)设置屏幕包括以下内容:
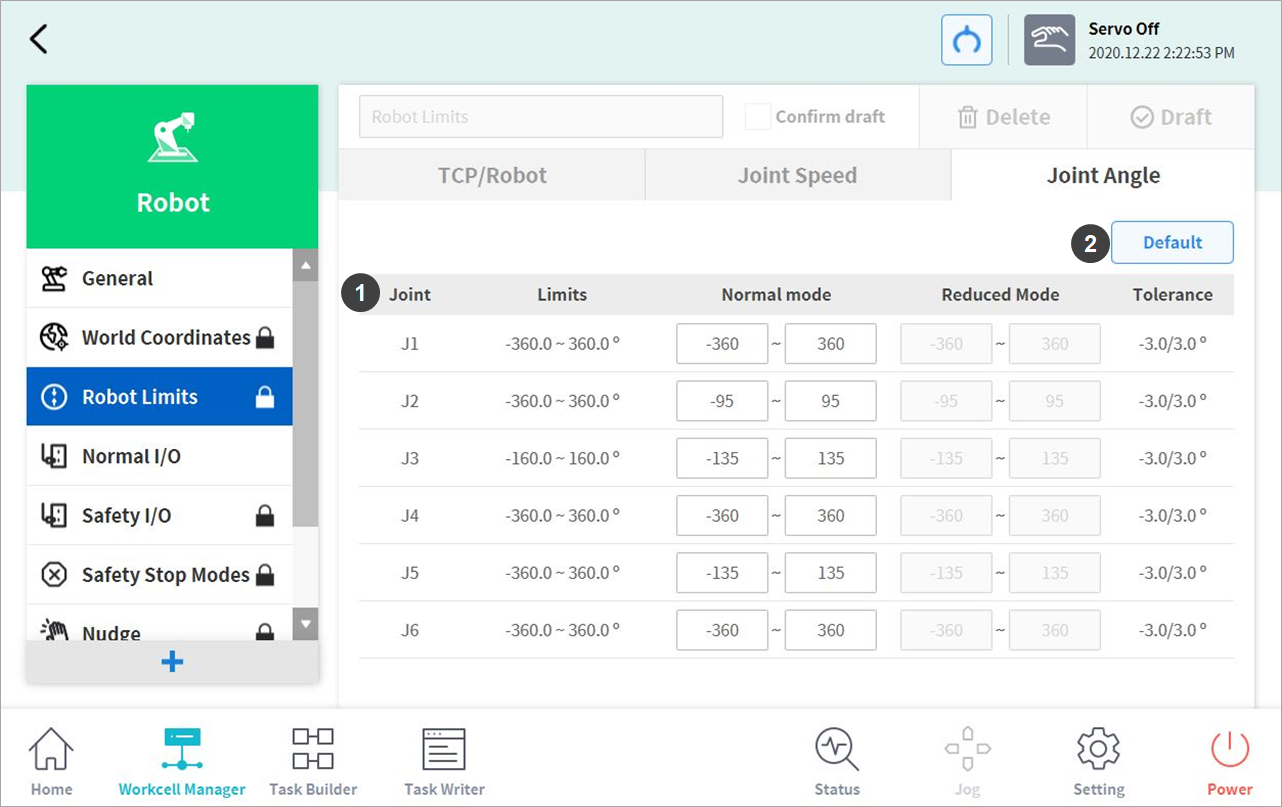
编号 | 项 | 说明 |
1 | Angle Range of each Joint | 可以限制每个关节的角度范围。 |
2 | Default Value | 将 Joint Angle Limits(关节角度限值)设置重置为默认值。 |