
机器人安装位姿设置
机器人能够以任意角度安装。要配置机器人安装位姿,点击 Robot(机器人)工作单元上的 
编号 | 项 | 说明 |
|---|---|---|
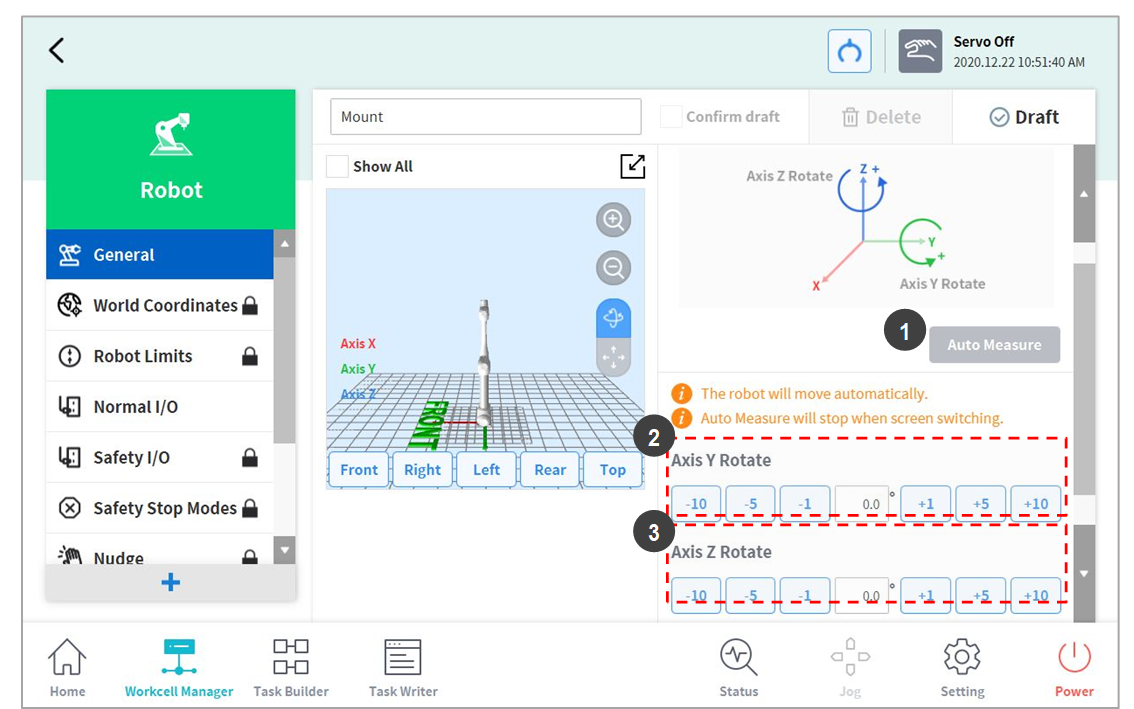
1 | Auto Calculate | 自动计算机器人的安装角度。 |
2 | Y-axis Rotation Setting | 在安装过程中输入机器人的 Y 轴角度。 |
3 | Z-axis Rotation Setting | 在安装过程中输入机器人的 Z 轴角度。 |
注
点击 Auto Calculate(自动计算)按钮可自动计算倾斜角度值。当机器人底座与地面间倾斜角度超过 5 度时,可以使用安装位姿自动计算功能。机器人安装位姿自动计算功能可以轻松配置实施直接示教、力控制和柔度控制功能所需的安装位姿,而无需输入准确的安装角度值,但是自动计算的机器人位姿设置的绝对位置精度可能会低于精确测得值的精度。
警告