
机械手设置 - 设置 World 坐标
可选 正常 3 分钟
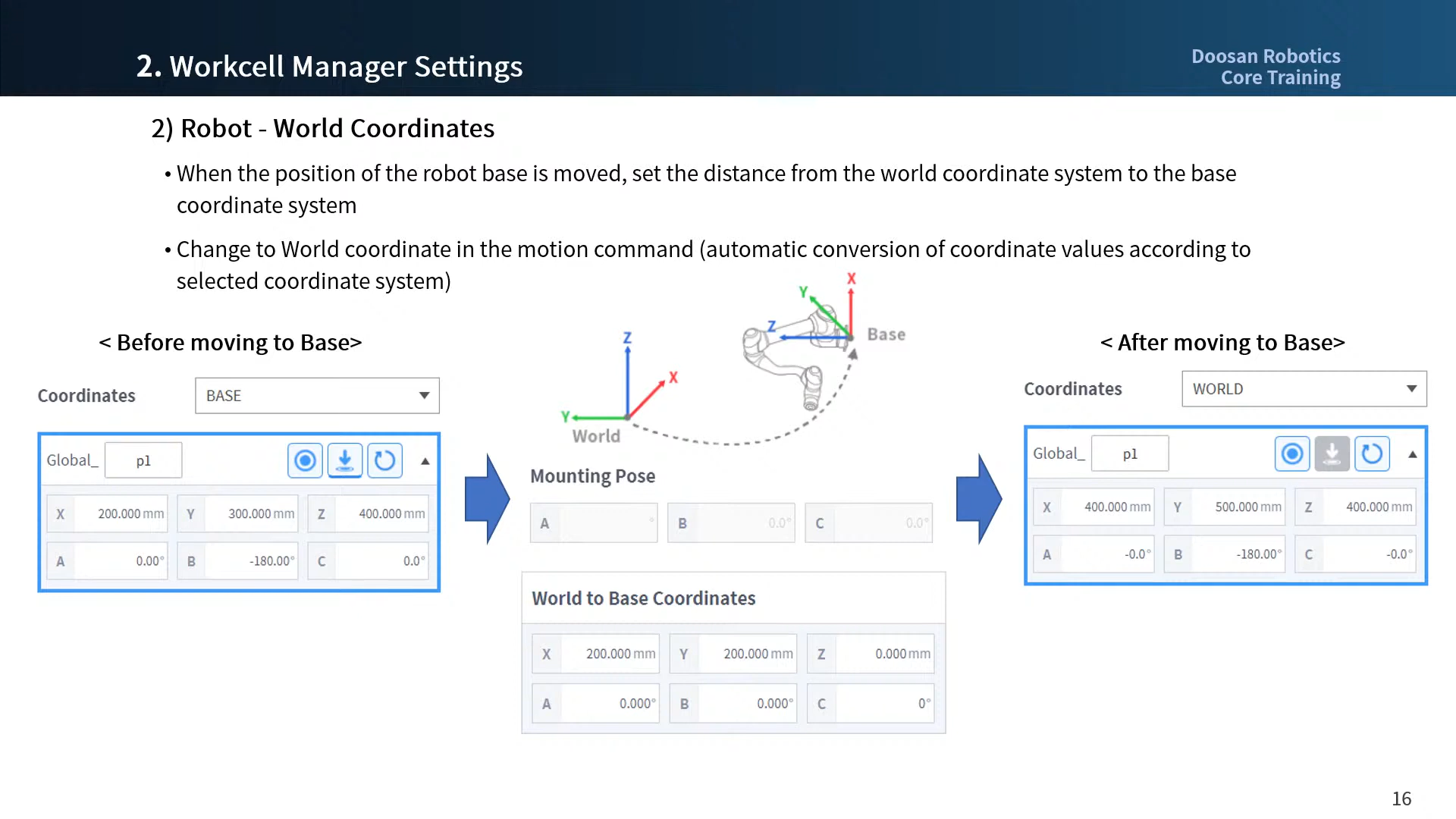
机器人的世界坐标可以从世界坐标设置。如果机械手坐标是基准坐标,则可以跳过此步骤。
可以通过 Workcell Manager > Robot > World Coordinates 设置世界坐标 。有关更多信息,请参阅 设置世界坐标。
- 当机械手底座安装位置实际移动 / 旋转时,将使用世界坐标。
- 更改世界坐标将对机械手模拟器屏幕应用相同的移动 / 旋转。
注
即使在机器人教学后更改了基准位置和角度,也可以使用世界坐标。如果过去通过机器人教学创建的任务的坐标从基坐标更改为世界坐标,则与世界坐标的移动 / 旋转相对应的偏移将应用于所有运动坐标。