Euler Angle A , B , C 是什么?
Euler Angle 是一种表示 X , Y 和 Z 轴角度的方法,这些轴在对象方向上彼此垂直。A , B 和 C 是指顺序旋转角度。每个机械手制造商对 A , B 和 C 旋转顺序的定义不同,例如 Rz-ry-Rx 或 Rx-ry-Rz。
斗山机器人使用 Rz-ry-Rz。在这里, Rz 是指 Z 轴的旋转, ry 是指 Y 轴的旋转。Rz 可以用角度 A 表示, Rz 可以用角度 B 表示, Rz 可以用角度 C 表示对象当前的旋转方向。请注意,从坐标沿 Z 轴方向旋转后,将根据新坐标进行旋转。
这可以通过步骤 1 至 4 来显示。
假设有坐标 (X , Y , Z)。
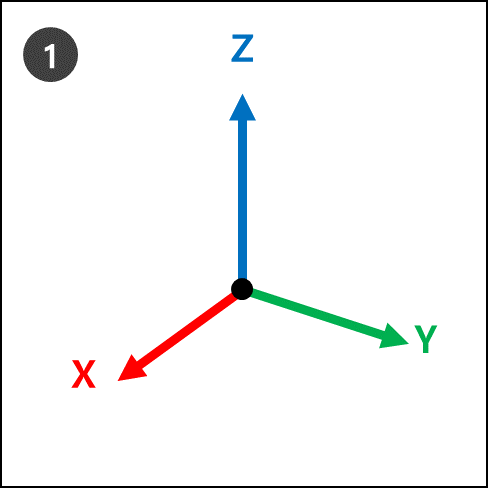
雷斯:从 Z 轴旋转一度。
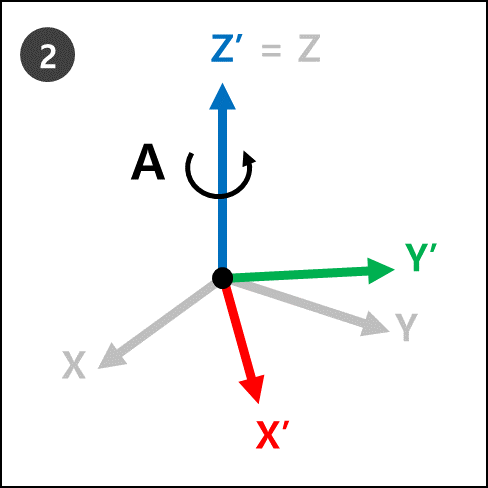
抱歉: 在步骤 2 中,从新坐标 (X ’, Y ’, Z ’) 的新 Y 轴 (Y ’) 旋转 B 度。
雷斯:在步骤 3 中,从新坐标 (X ’’, Y ’, Z ’) 的新 Z 轴 (Z ’’) 旋转 B 度。
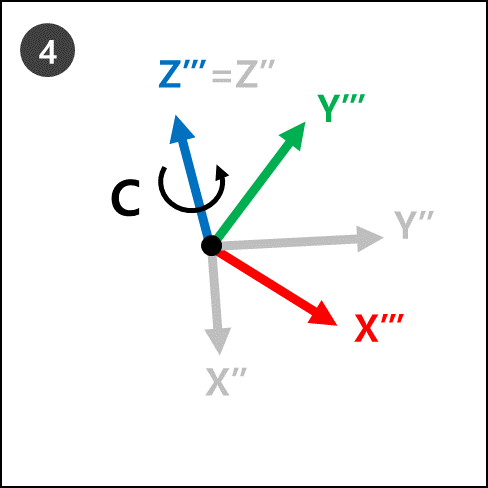
步骤 4 的新坐标 (Z ’’’’, Y ’’, X ’’’’) 是指应用 Euler 角度 A , B 和 C 时的当前机械手旋转。
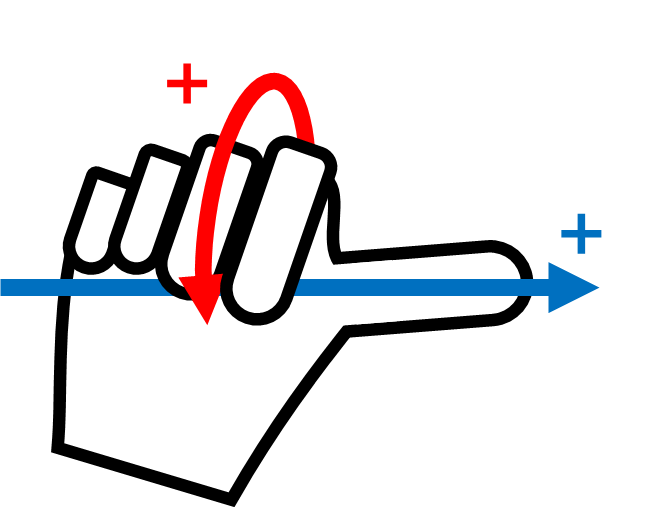
这可以用右手轻松地看到。用右手做以下姿势。这称为右侧规则,使拇指 (X 轴) ,食指 (Y 轴) 和中指 (Z 轴) 彼此垂直将形成由 X , Y 和 Z 轴组成的坐标。
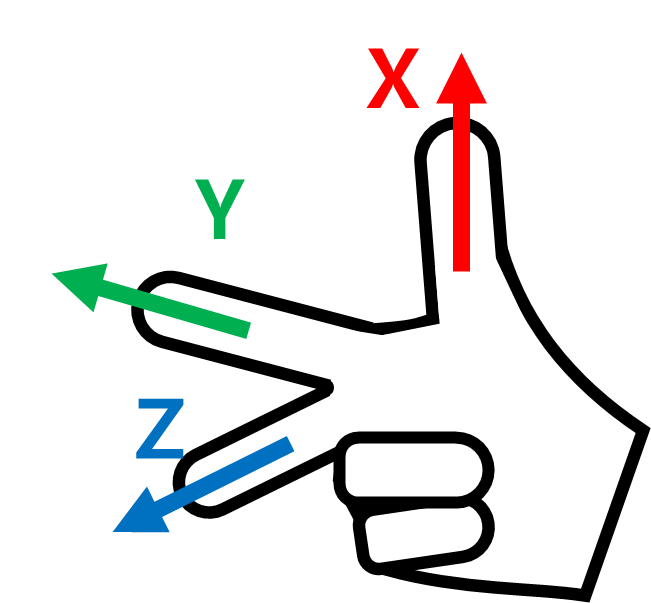
然后制作右手规则笛卡尔坐姿,按顺序依次旋转 Rz , ry 和 Rz。
Rz :将中指 (Z 轴) 旋转一度。
是:将食指 (Y 轴) 旋转 B 度。
Rz :将中指 (Z 轴) 旋转 C 度。
注
A , B 和 C 的 + 旋转方向是指除拇指以外的四个手指的方向,此时拇指指向 + 方向且四个手指被浸湿。这称为顺时针螺钉定律。