
固定机器人
在机器人底座中的四个 9.5 mm 孔上使用 M8 螺栓固定操纵器。
- 建议使用 20 Nm 的拧紧扭矩拧紧螺栓。 请使用垫圈(扁平弹簧)以防止因振动而松动。
- 使用 Φ5 定位销将操纵器准确地安装在固定位置。
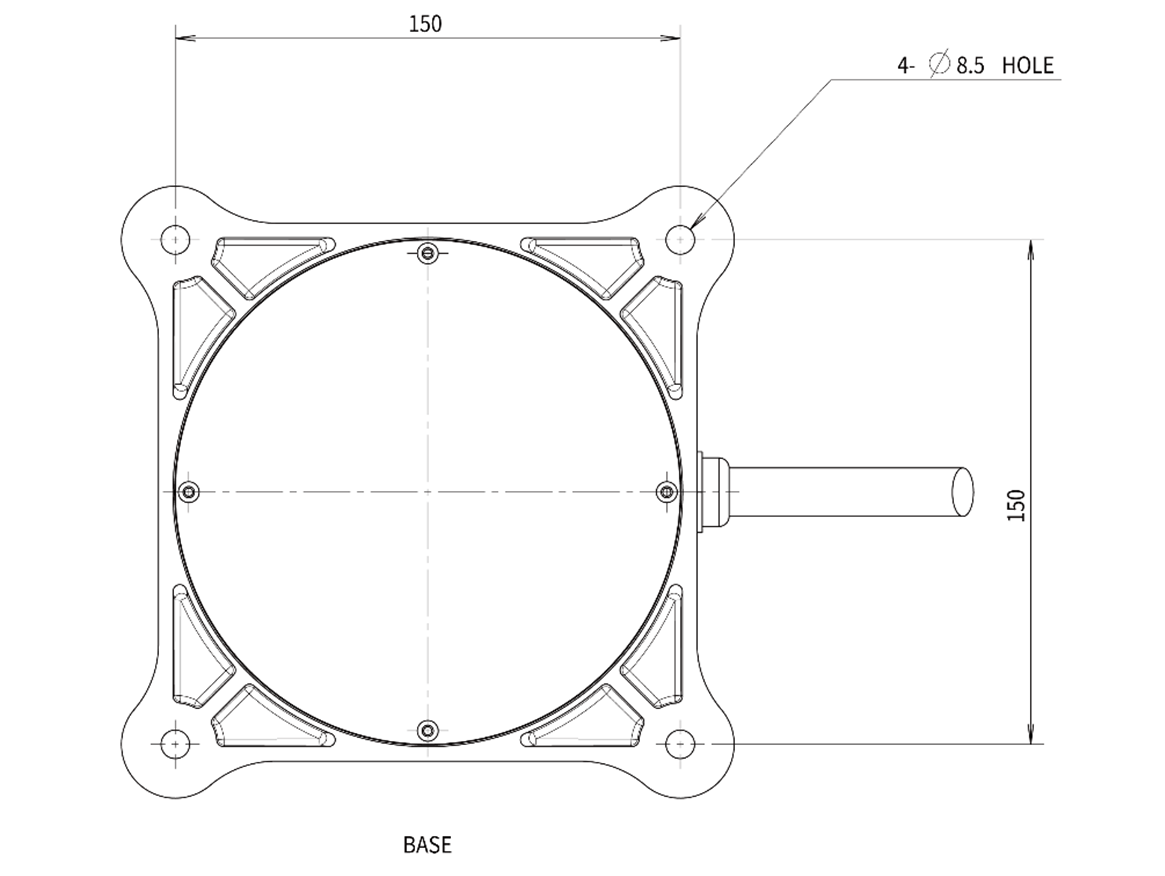
操纵器底座图(使用四个 M8 螺栓)。单位 [mm]
警告
- 将螺栓拧到底,防止操纵器运行过程中发生松动 。
- 将操纵器底座安装在可以承受运行过程中产生的负载(最大扭矩的 10 倍和机器人重量的 5 倍)的坚固表面上 。
- 机器人会将操纵器底座的振动解读为碰撞,并启动紧急停止。因此,如果安装位置可以自动切换方位,则不要将底座安装在运动加速度较高的位置上 。
- 使用适当的方法将机器人手臂安装在特定位置。安装表面必须是坚硬的固体。
- 如果长时间与水接触,可能会损坏操纵器,因此,请勿在潮湿或水下环境中操作操纵器 。