
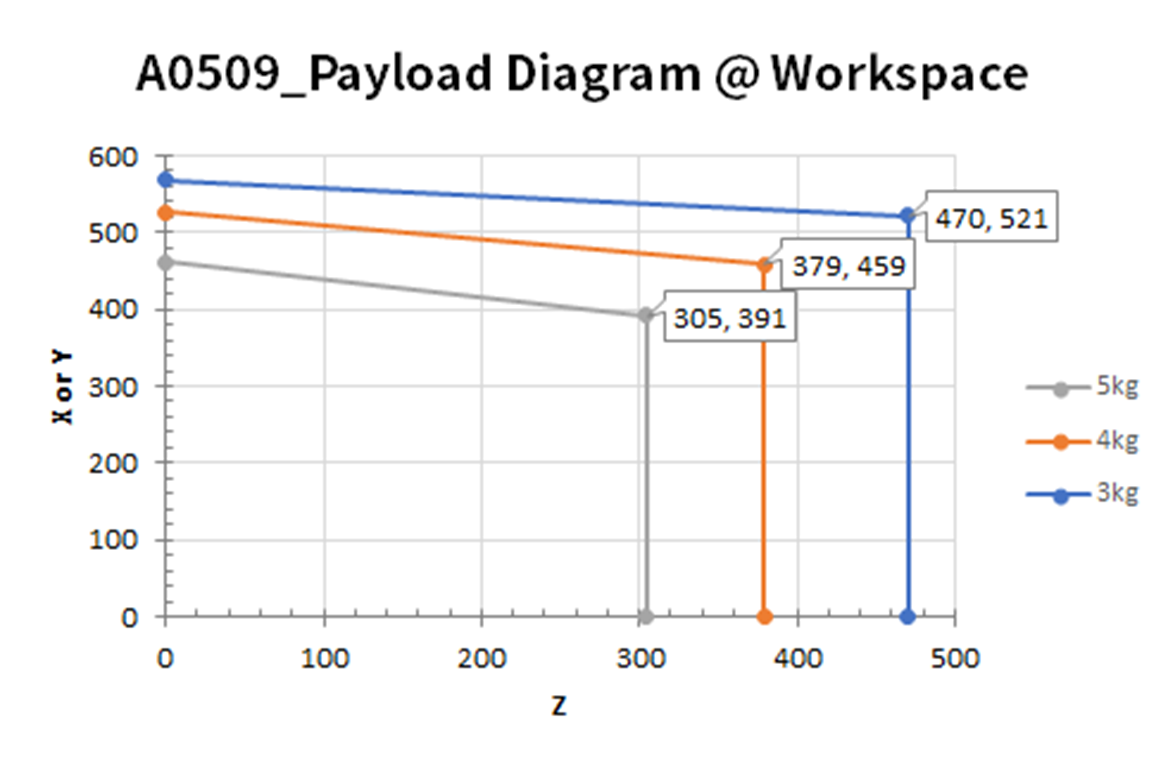
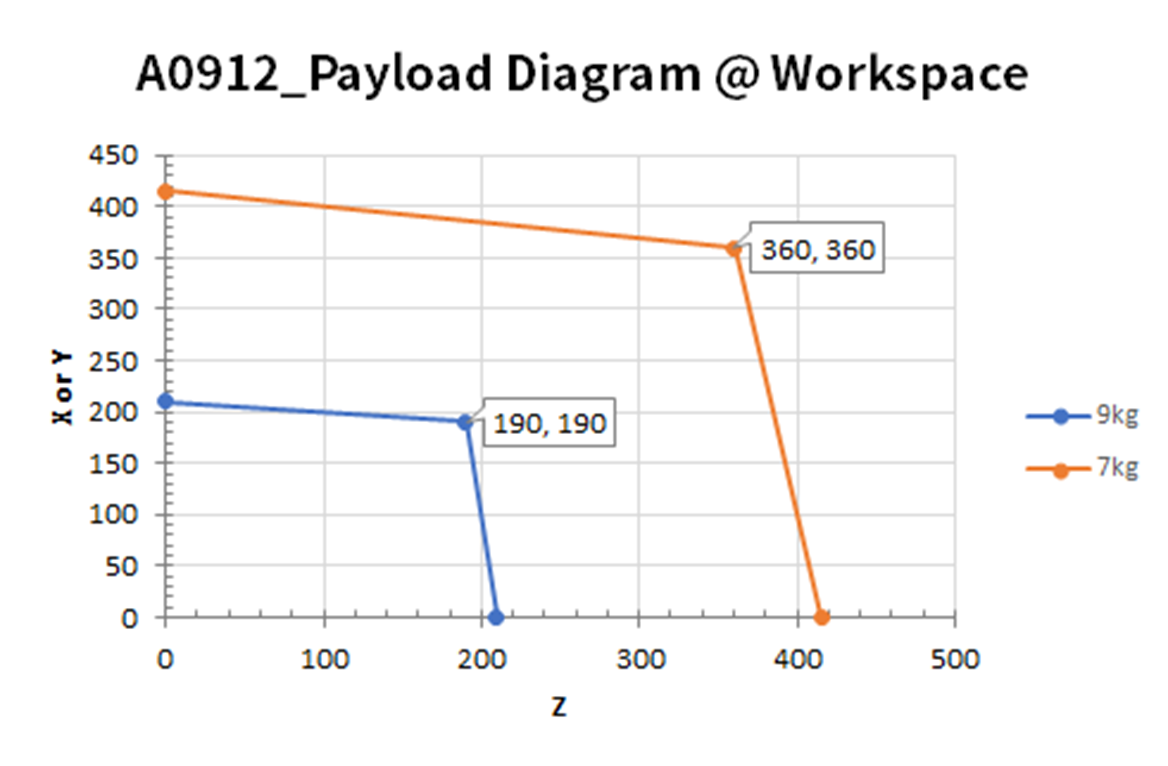
运行空间内的最大有效载荷
机器人在其运行空间内的最大有效载荷会随着与重心的距离变化。不同距离下的有效载荷如下:
注
该载荷图假定工具载荷体积较小。工具重量相同时,体积较大的工具在其重心上方的有效载荷会比体积较小的工具的限制更大,而且在这种情况下可能会发生振动。
A0509
A0912
允许的力矩和惯性
J4-J6 机器人允许的力矩和惯性如下:
| 型号名称 | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
| 允许的力矩 | 惯性 | 允许的力矩 | 惯性 | 允许的力矩 | 惯性 | |
A0509 | 50 Nm | 0.69 kg㎡ | 50 Nm | 0.69 kg㎡ | 50 Nm | 0.69 kg㎡ |
A0912 | ||||||
A0509s | 11 Nm | 0.15 kg㎡ | 11 Nm | 0.15 kg㎡ | 11 Nm | 0.15 kg㎡ |
A0912s | ||||||