技巧 - 尝试挑选和放置样品
可选 正常 20 分钟
此示例在任务生成器中创建。任务编写器不支持 skill 功能。
小心
- 在尝试样本之前,请确保阅读并遵循 使用注意事项。有关详细信息,请参阅 第 1 部分 .安全手册。
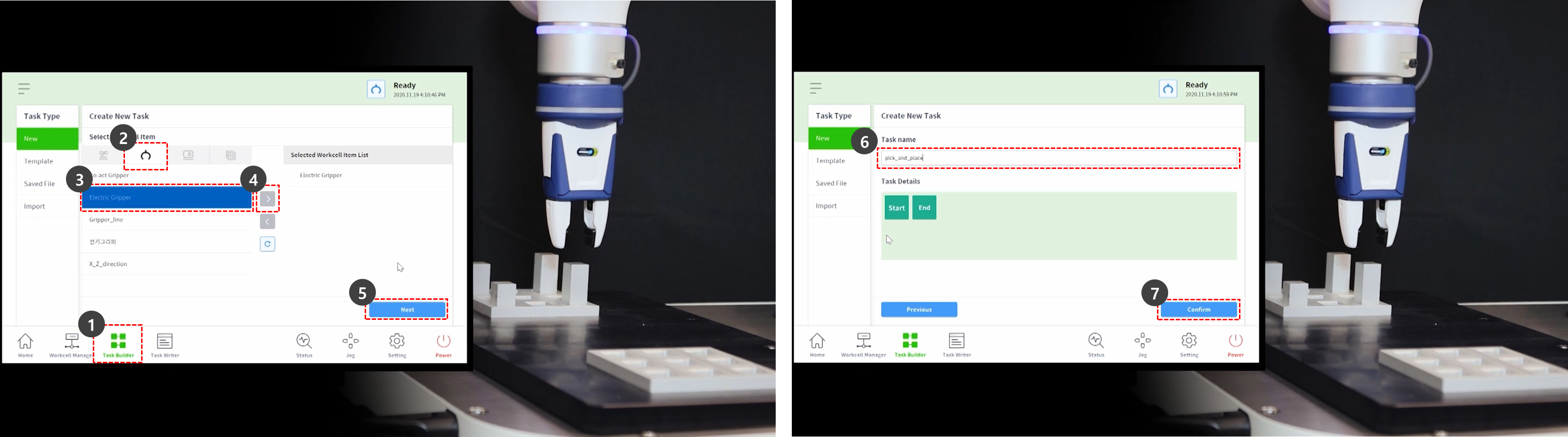
- 从底部菜单中选择任务构建器。
- 选择 Select workcell item > Gripper (选择工作单元项目 > Gripper) 图标。
- 选择注册为工作单元项目的夹具。如果没有将夹具注册为工作单元项目,则无法尝试使用此样本。
- 按 > 按钮将工作单元格项目注册为选定的工作单元格项目。
- 按“ Next (下一步) ”按钮。
- 输入任务名称。
- 按确认。
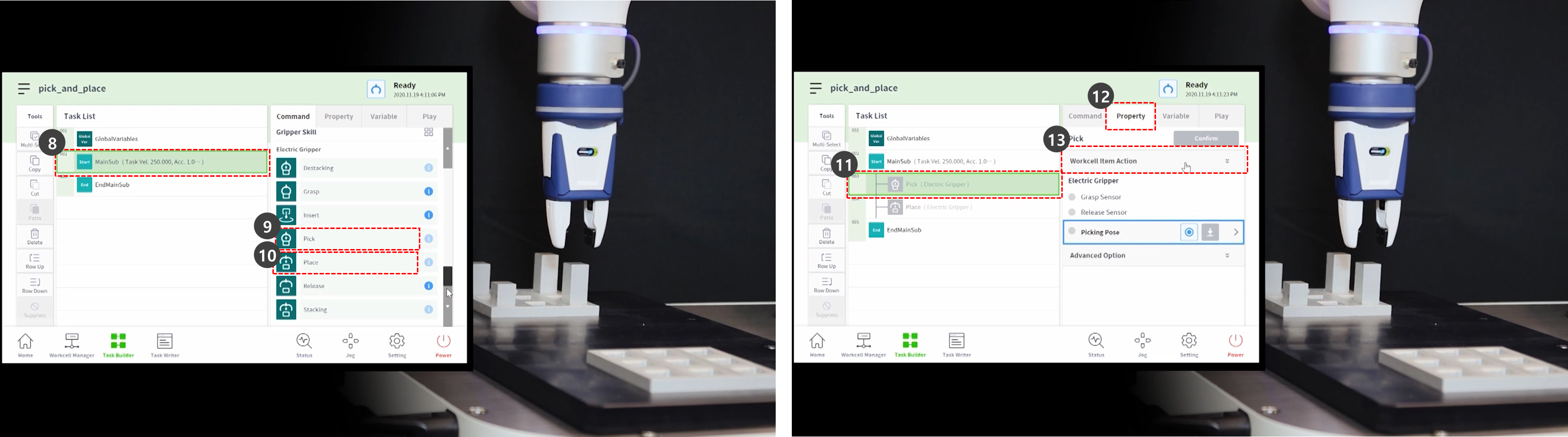
- 从任务列表的第二行中选择 MainSub 命令。新命令将添加到所选行的下一行。
- 添加选择 skill 命令。
- 添加 Place skill 命令。
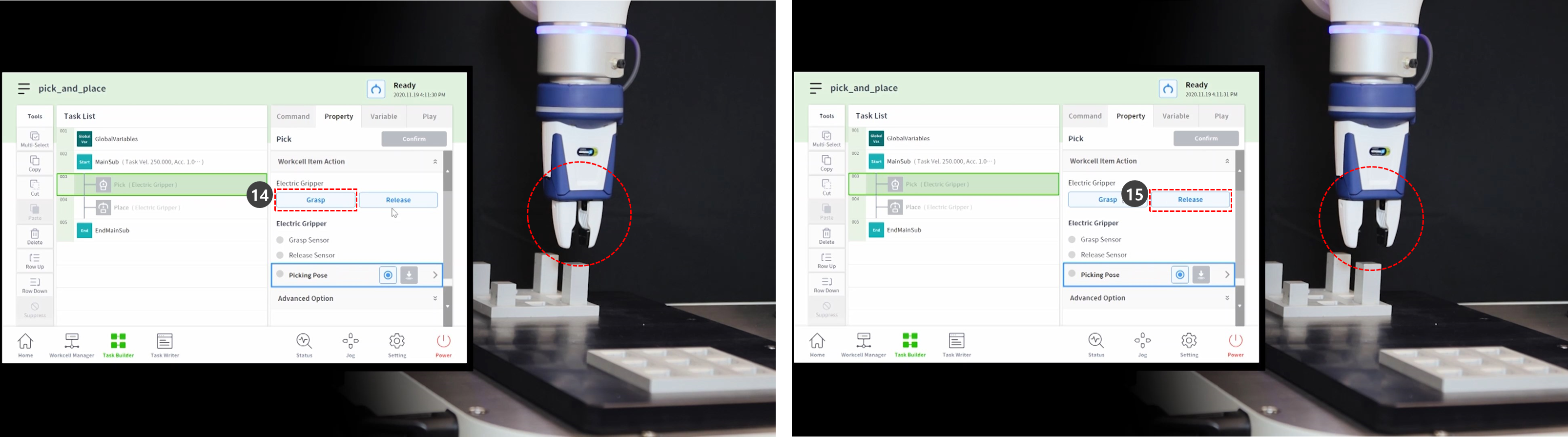
- 从任务列表的第三行中选择“选择”命令。
- 选择属性选项卡。
- 按工作单元格项目操作展开菜单。如果选择了夹具工作单元项目,则可以在工作单元项目操作期间测试夹具操作。
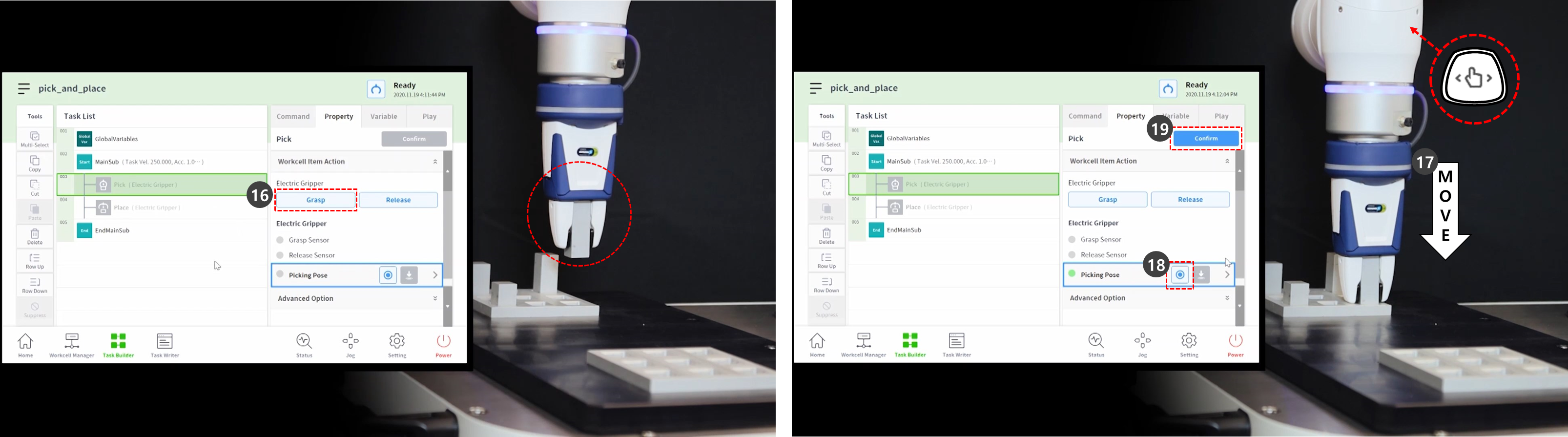
- 要测试夹具,请按下夹具按钮并执行夹具运动。
- 要测试夹具,请按下释放按钮并执行释放动作。
- 如果工件较轻,请将工件放入夹具中,然后按下夹具按钮,让机械手固定工件。夹具固定工件时进行教学有助于确定准确的位置。
- 但是,在教学过程中让机械手固定工件并不是强制性的,而是一个例子。
- 如果工件很重,可能会发生危险情况,因为夹具会丢失工件。
- 如果是重型工件,“工具设置”的“工具重量”必须包括工具重量和工件重量。
- 使用直接教学将机械手移动到执行拾取的位置。
- 按住驾驶舱中的手动导向按钮以移动机械手。
- 按下拣选姿势的 Get pose (获取姿势) 按钮。
- 按确认按钮。
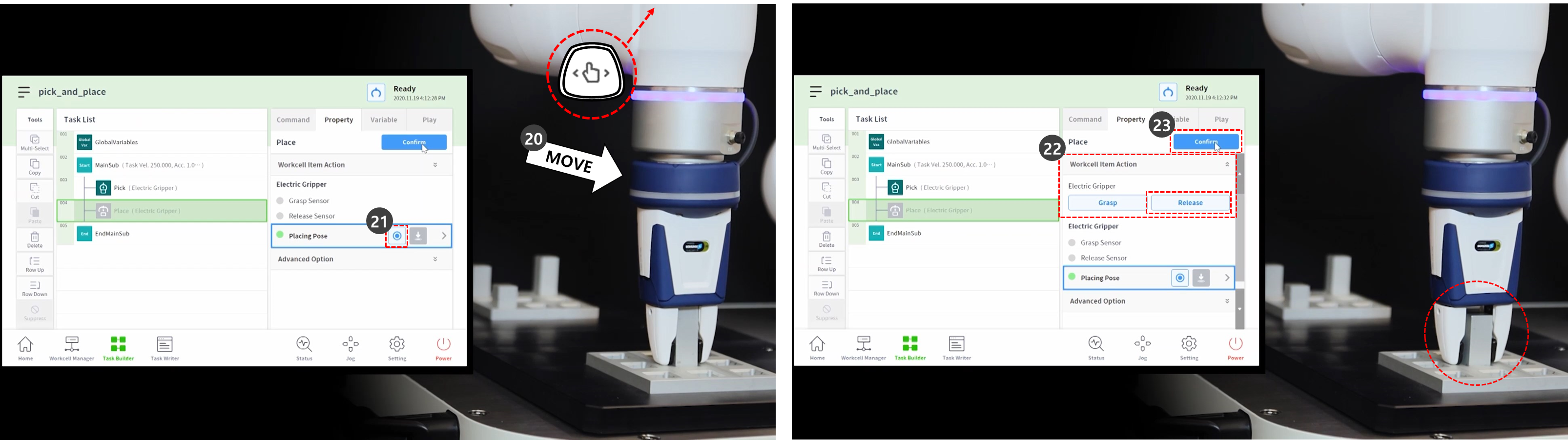
- 使用直接教学将机械手移动到将要放置的位置。
- 按配售组合的“ Get pose (Get pose) ”按钮。
- 要从夹具上松开工件,请按下释放按钮。
- 按确认按钮。
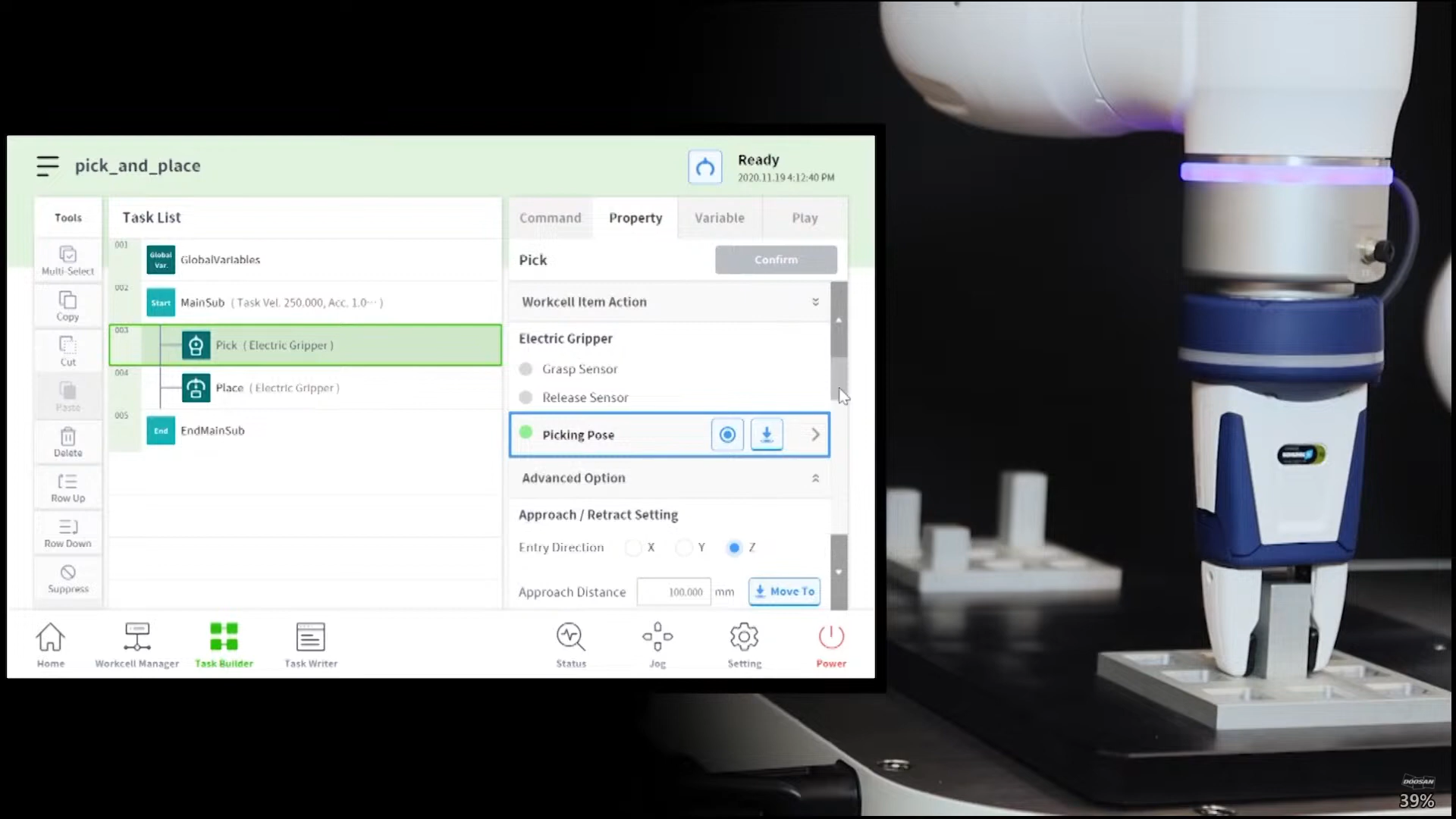
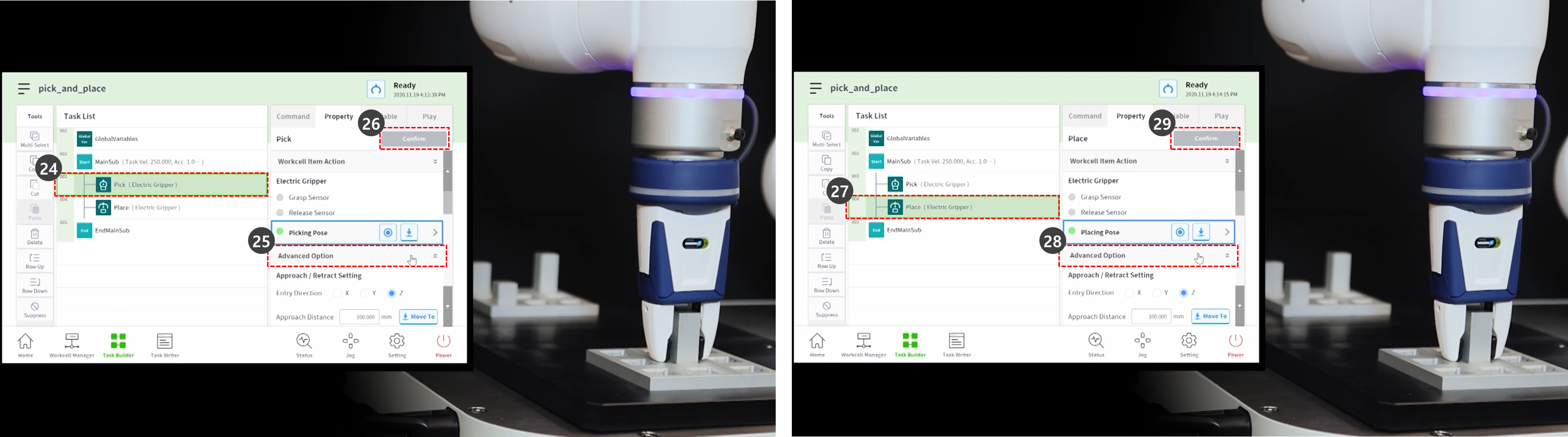
- 要设置挑选和放置 skill 命令的详细设置, 请选择任务列表第三行中的挑选命令。
- 按“高级选项”展开菜单,并设置为:对以下未描述的项目使用默认值。
- 进入方向:Z 轴
- 它设置进入拾取位置的方向。
- 接近距离:100 毫米
- 它设置了机械手接近拾取位置之前的距离。它可以确保足够的接近距离。
- 缩回距离:100 毫米
- 它设置机械手沿设定方向从拾取位置缩回后的距离。它可固定足够的缩回距离。
- 接近速度:100 mm/s
- 当机械手接近物体时,它将接近速度设置为低于默认值。
- 合规性控制:已启用 (绿色)
- 感应触点:已启用 (绿色)
- 它支持合规性控制和触点检测功能。
- 接触力:10n
- 触点容差:10 毫米
- 力:15 牛
- 刮擦偏移:2mm
- 采棉前释放夹具:已启用 (绿色)
- 在接近拾纸位置之前,它会将夹纸器设置为“释放”状态。
- 工具重量:无
- 如果工件不亮,则必须对工件重量和刀具重量进行求和,添加为“刀具重量”工作单元,并进行选择。
- 进入方向:Z 轴
- 按确认按钮。
- 从任务列表的第四行选择 Place 命令。
- 按“高级选项”展开菜单,并设置为:对以下未描述的项目使用默认值。
- 进入方向:Z 轴
- 接近距离:100 毫米
- 缩回距离:100 毫米
- 接近速度:100 mm/s
- 合规性控制:已启用 (绿色)
- 感应触点:已启用 (绿色)
- 它支持合规性控制和触点检测功能。
- 接触力:10n
- 触点容差:10 毫米
- 力:15 牛
- 工具重量:无
- 按确认按钮。
- 使用直接教学将机械手移动到拾放开始的位置。
- 将工件移至拾取位置。
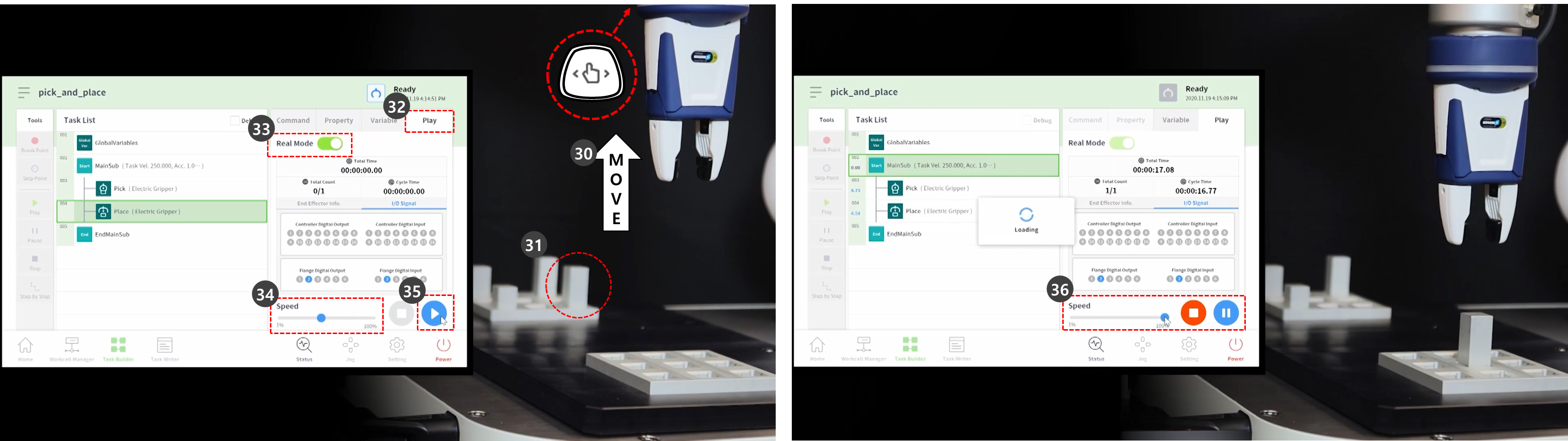
- 选择播放选项卡。
- 启用 Real Mode 切换按钮。
- 将速度滑杆调整到 10-30%。
- 此速度滑块将所有命令的设定速度调整为选定的 %。
- 当任务在创建后首次执行时,以较低的速度执行任务可能会防止意外风险。
- 按播放按钮。
- 如果任务未出现问题就完成,请将速度调整回默认值 100% ,然后再次测试。