测量位姿和条件
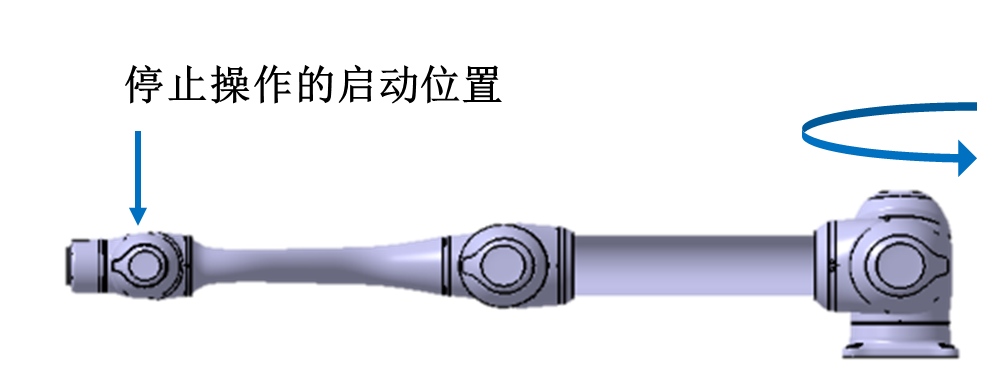
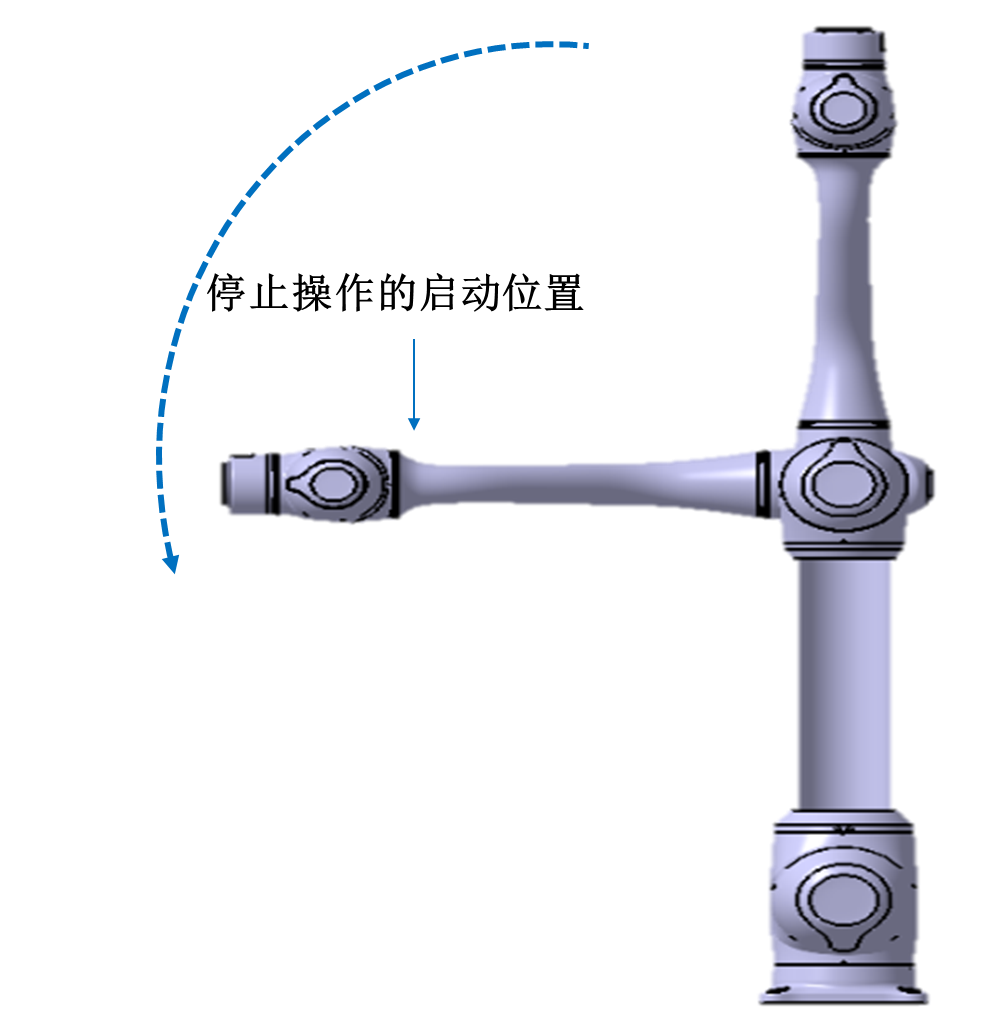
在旋转轴垂直于地面且做水平运动期间执行关节 1 测量。
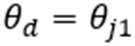
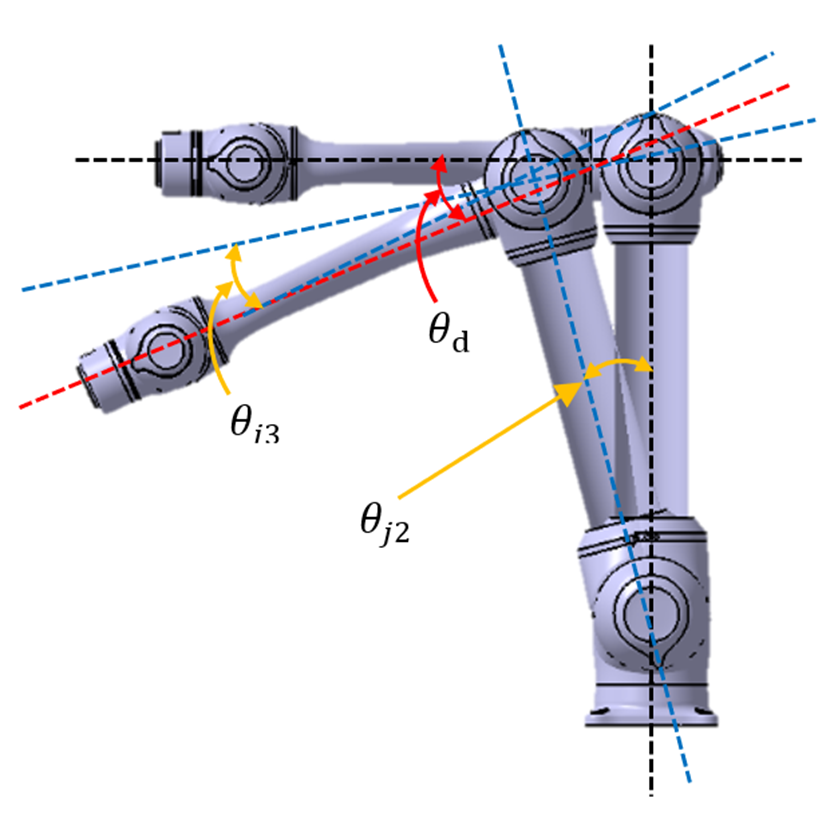
在旋转轴平行于地面且机器人在垂直于地面的向下运动中停止时执行关节 2 和关节 3 测量。
注
该测量结果是最坏情况下的结果。测量可能因情况而异
伸展 33%、66% 和 100% 时的位姿
| 关节 1 | 关节 2 | 关节 3 |
100% 伸展 停止类别 0 | | | |
33% 伸展 停止类别 1 | | |
- |
66% 伸展 停止类别 1 | | |
- |
100% 伸展 停止类别 1 | | | |

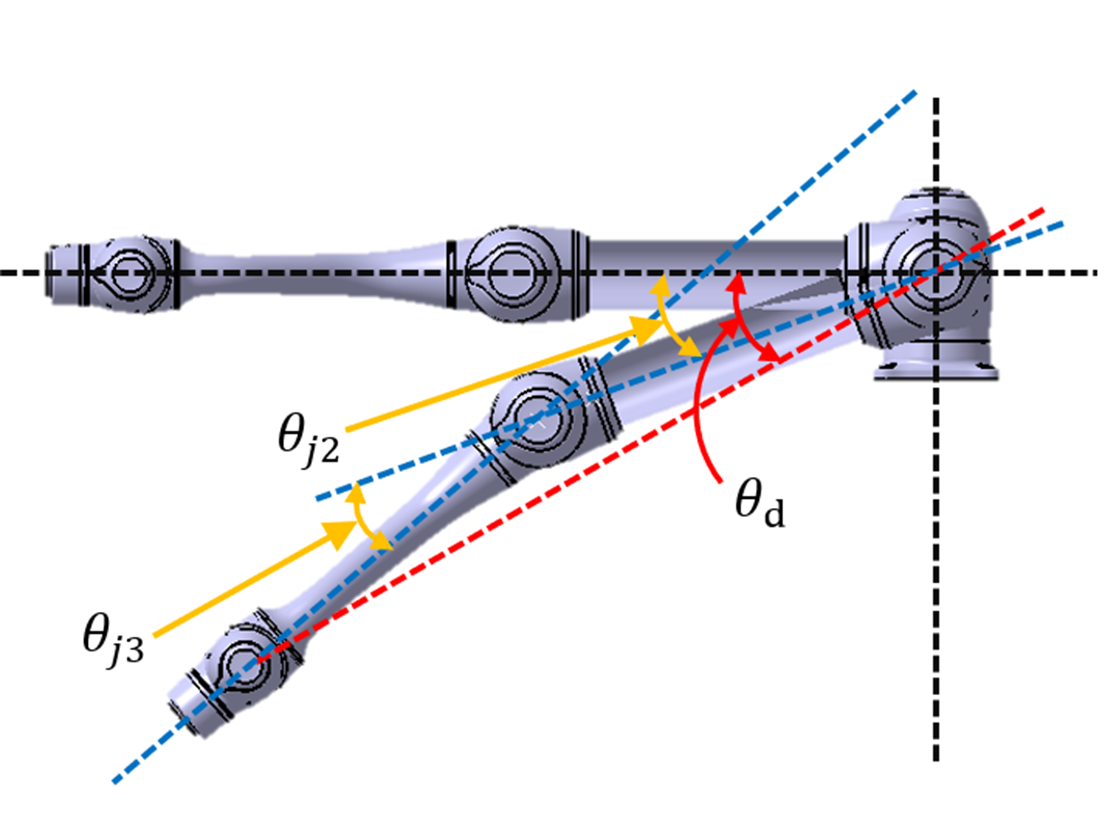
停止操作启动时的位姿和测得的角度 (
停止操作启动时的位姿 | 测得的角度 | |
关节 1 | | 无滑动, |
关节 2 | | |
关节 3 | | |