
系统还原
将机器人系统还原到用户选择的特定版本。
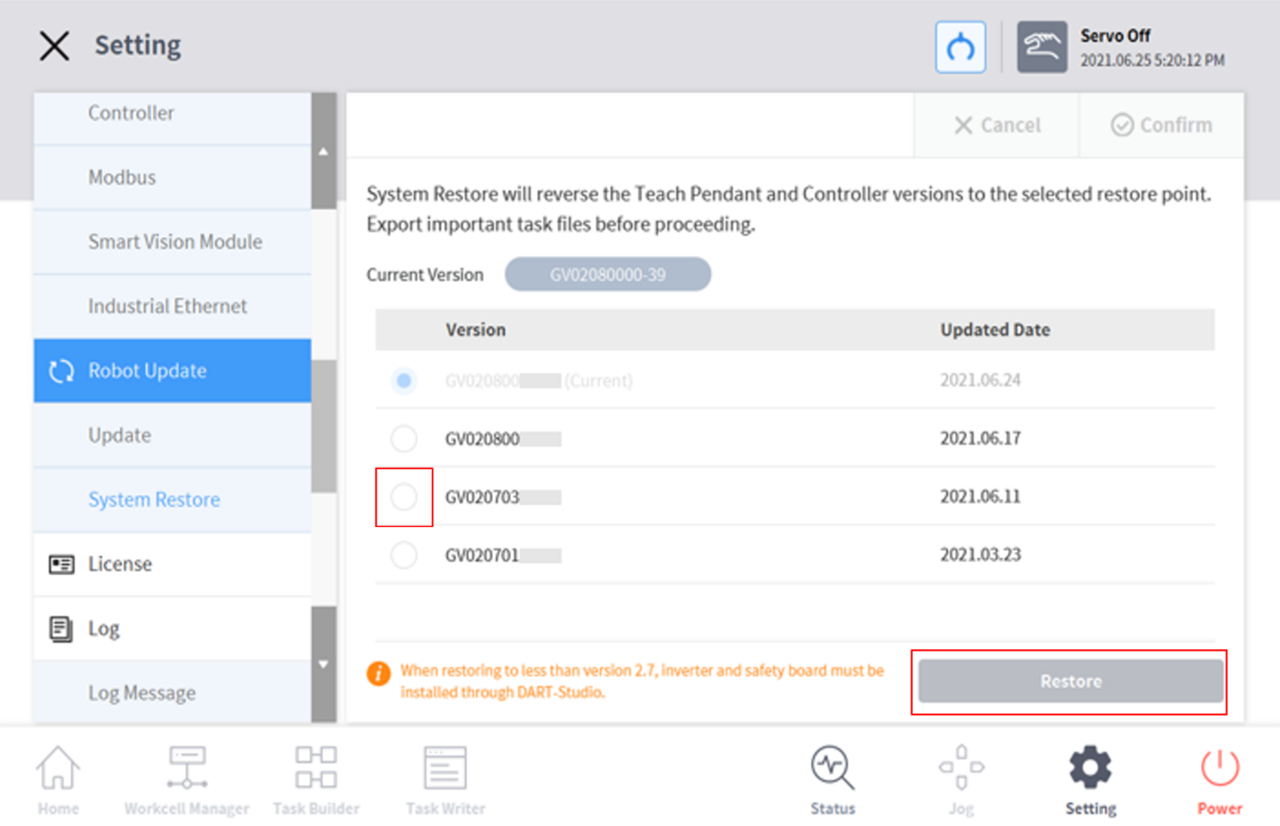
- 在 Setting(设置)菜单中,选择 Robot Update > System Restore(机器人更新 > 系统还原)。
- 将显示机器人系统上安装的最后五个版本。
- 在选择单选按钮的情况下将显示当前版本。
- 选择要还原的版本的单选按钮。
- Restore(还原)按钮已启用。
- 按下 Restore(还原)按钮。
- 还原完成后,重新启动系统。
注
- 访问系统,则系统还原功能不可用。
Version : A Series
如果系统还原后 A 系列产品出现以下问题之一,请参考“摩擦校准”以执行摩擦校准。
1.问题导致难以控制直接示教
- 即使工具重量和重量中心点的设置正确,直接示教仍无法正常工作时
- 在尝试直接示教时,机器人移动过快或施加的力过大
- 尝试直接示教时,特定方向的控制变得困难
- 在碰撞灵敏度设置为默认设置时频繁发生碰撞检测
2.示教器中偶尔出现错误“2.9015”
- 错误 2.9015:机器人尖端的外力超过安全范围。