
实时模式屏幕:末端执行器信息选项卡
Task Builder 的实时模式屏幕 End Effector Information(末端执行器信息)选项卡结构如下:
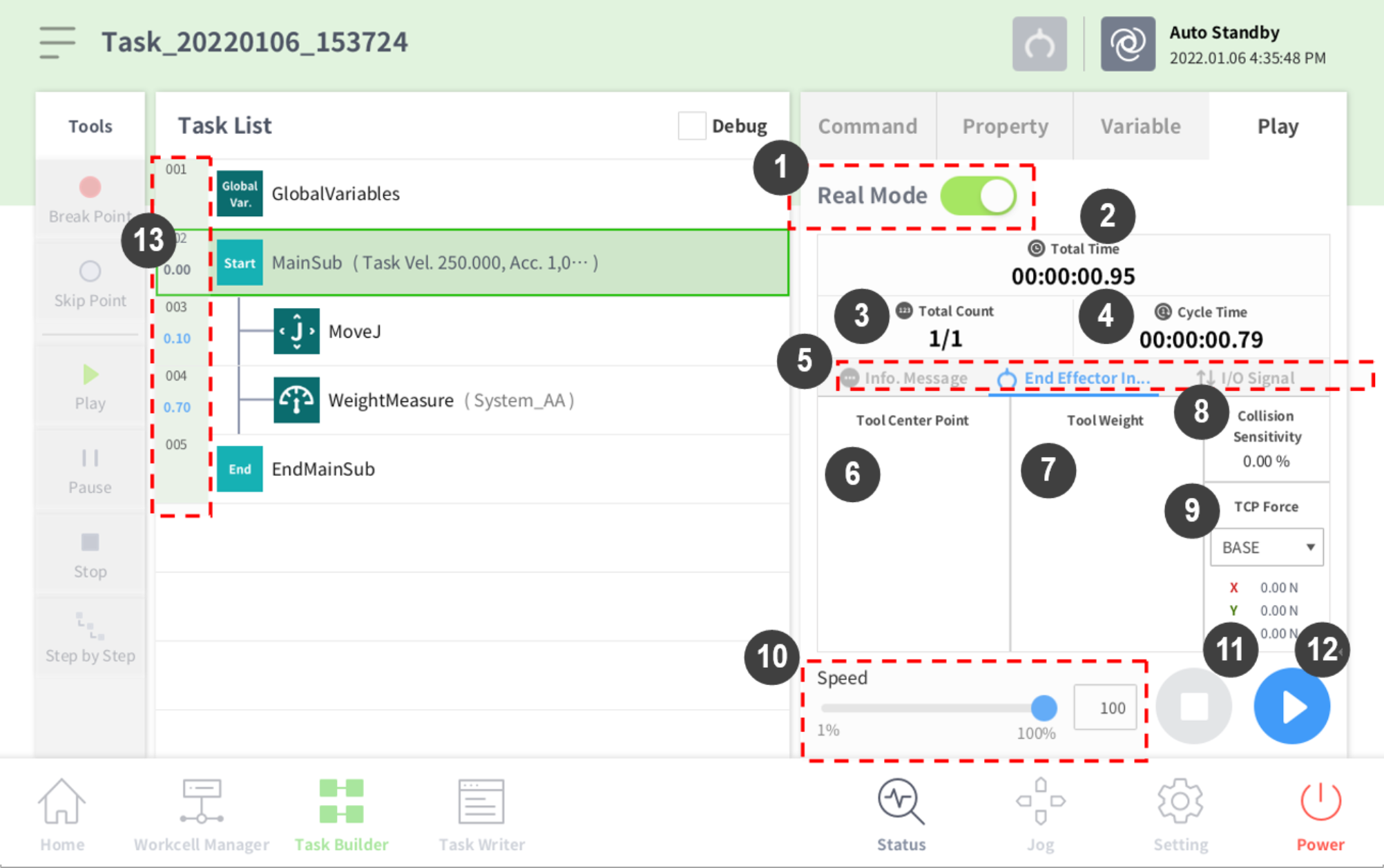
编号 | 项 | 说明 |
1 | Real Mode ( | 设置机器人测试播放模式。
|
2 | Total time | 显示任务执行后经过的总时间。 |
3 | Total count | 显示执行任务的总数。 |
4 | Average execution time | 显示执行任务列表中的任务的平均周期时间。 |
5 | Information Screen Shift Tab | 您可以在机器人信息消息屏幕、末端执行器信息屏幕和输入/输出信息屏幕之间切换。
|
6 | Tool center point information area | 显示通过 set TCP 命令或点动的工具中心点和重量配置功能配置的工具中心点信息。 |
7 | Tool weight information | 显示通过 set TCP 命令或点动的工具中心点和重量配置功能配置的工具重量信息。 |
8 | Collision information area | 显示机器人当前定位区域的碰撞灵敏度值。 |
9 | Force information area | 显示发生在底座、世界、用户和参考坐标系中的力信息。参考坐标系基于应用于机器人的坐标系信息来显示力。 |
10 | Speed slider | 用于设置实时/虚拟模式下机器人的速度。 |
11 | Stop button | 用于停止当前任务。 |
12 | Execute/pause toggle button | 用于执行或暂停任务列表中的工作。 |
13 | Time | 用于显示相应命令/技能所用时间。 |

注意
- 在执行任务之前,先以虚拟模式执行任务,检查任务是否按预期运行。
- 建议通过指定在另一台机器的作业空间之外的临时路径点对机器人程序进行测试。对于因编程错误或机器人故障而造成的损失以及对设备造成的损坏,Doosan Robotics 概不负责。
- 紧急停止按钮位于示教器上。在紧急情况下,可按下紧急停止按钮使机器人停止。
- 对于没有配备力矩传感器的产品型号,不会监控力 (X, Y, Z) 值。